一种盾构控制方法及其系统
1.本发明涉及盾构掘进施工领域,尤其涉及一种盾构控制方法及其系统。
背景技术:
2.作为隧道开挖的主要工法之一,盾构法因其安全性高、环境污染小、自动化程度高及施工效率高等优点,在隧道施工中得到了广泛的应用。作为盾构机三大系统之一,推进系统由一系列环形分布液压油缸组成,在盾构掘进过程中起着关键作用。盾构机在克服周围土体作用力下推进、位姿调整、纠偏等功能的实现严格依赖于盾构推进系统。而作为盾构推进系统的重要性能参数,油缸推力的合理确定是盾构机设计阶段和施工过程中的关键环节。
3.目前针对盾构掘进推力的计算方法主要有:1、通过大量施工案例总结出的经验公式计算盾构掘进总推力;2、通过理论计算盾构掘进过程中来自土体的负载,并通过建立盾构机的静力平衡方程来计算盾构掘进总推力。3、随着计算能力的提高,基于盾构掘进过程中产生的大量数据采用深度学习等手段来建立数据模型进行计算盾构掘进总推力。
4.上述现有技术中的缺点为:第一种方法计算精度非常粗糙,不利于盾构掘进精度和效率的提高。第二种方法在计算盾构负载过程中,为考虑刀盘
‑
土体和盾周
‑
土体的相互作用关系,从而导致计算的总推力忽略了盾构掘进参数(贯入度和位姿等)以及地层参数的影响。第三种方法在计算盾构推力的精度受数据模型本身特性影响,且可迁移性差。另外,目前关于盾构掘进推力的计算大多聚焦于油缸总推力。而实际上盾构液压油缸是分组分区进行控制的,在实际盾构掘进过程中,通过控制不同分区油缸的推力实现盾构的推进、姿态调整和纠偏等功能。因此,仅通过盾构油缸的总推力控制盾构掘进的控制精度均较差,不利于盾构掘进的施工。
技术实现要素:
5.本发明的实施例提供了一种盾构控制方法及其系统,考虑了盾构掘进参数、土体参数和盾构机
‑
土体相互作用等因素,具有较高的计算精度和工程适用性,能够为盾构司机或是智能推进系统提供分区推力设定依据。
6.为了实现上述目的,本发明采取了如下技术方案。
7.一种盾构控制方法,包括以下步骤:
8.s1、建立盾构位姿坐标系统,根据盾构位姿坐标系构建盾构位置和姿态的齐次变换矩阵来描述盾构掘进过程中的位姿变化,并结合盾构参数求解盾构推进机构速度雅克比矩阵,以及根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移;
9.s2、根据盾构位置和姿态的齐次变换矩阵对盾构掘进过程受的负载进行建模求解各种分力,包括:刀盘所受的法向力、盾周法向力、盾周摩阻力、管片
‑
盾尾摩阻力与后配套拖曳阻力;
10.s3、将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获
得油缸的分区推力。
11.优选地,所述建立盾构位姿坐标系统包括:
12.建立三个坐标系,包括:固结在盾构机上的动坐标系{b}、固结在管片环上的基坐标系{a}和全局坐标系{g};
13.构建动坐标系{b
‑
xbybzb},该坐标系固结到中盾背板,原点b是油缸前球铰接的分布中心,在初始状态下,xb轴沿盾构机的中心轴指向掘进方向,zb轴垂直盾构机的中心轴并竖直向上,yb轴方向按右手原则确定;
14.构建基坐标系{a
‑
xayaza},该坐标系固结到给推进油缸提供反力的管片环上,原点a是油缸后球铰接的分布中心,在初始状态下,基坐标系{a
‑
xayaza}和动坐标系{b
‑
xbybzb}各坐标轴对应平行;
15.构建全局坐标系{g
‑
xyz},在初始状态下,全局坐标系{g
‑
xyz}和动坐标系{b
‑
xbybzb}各坐标轴对应平行;
16.其中,l
bc
为刀盘面板中心到b点的距离;l为油缸套筒的长度;li为第i根液压油缸的伸长量;l
r
为动坐标系原点b到盾壳尾端的距离;r为中盾内壳半径;r0为液压油缸分布圆的半径;r1为刀盘半径;δr
i
为管片环外表面和盾尾壳内表面的距离,即盾尾间隙。
17.优选地,所述根据盾构位姿坐标系构建盾构位置和姿态的齐次变换矩阵来描述盾构掘进过程中的位姿变化,并结合盾构参数求解盾构推进机构速度雅克比矩阵,包括:
18.采用求解盾构位置和姿态的齐次变换矩阵来表示基坐标系{a}和动坐标系{b}之间的变换关系,计算盾构位姿矩阵来描述盾构掘进过程中的位姿变化:
[0019][0020]
式中:
[0021]
为从动坐标系{b}到基坐标系{a}的旋转矩阵,且
[0022][0023]
ψ,θ,分别表示盾构机的横滚角、俯仰角和偏航角;c和s分别代表余弦函数cos和正弦函数sin;
[0024]
为从基坐标系原点a到动坐标系原点b的平移向量,表示动坐标系{b}在基坐标系{a}中的位置,且
[0025][0026]
所述盾构推进机构速度雅克比矩阵为
[0027][0028]
式中:
[0029]
b
u为液压油缸的单位方向向量,且
b
u=[1 0 0]
t
;
[0030]
b
i
为第i根油缸前球铰在动坐标系{b}中位置矢量,i取1~n,n为油缸总根数。
[0031]
优选地,所述根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移,包括:
[0032][0033]
式中:
[0034]
u
n
为土体位移;
[0035]
为基坐标系{a}到全局坐标系{g}的齐次变换矩阵;
[0036]
为初始时刻的盾构位姿矩阵;
[0037]
为下一时刻的盾构位姿矩阵;
[0038]
b
s为盾壳外表面任意一点s在动坐标系{b}下的位置矢量,用下式表示
[0039]
s
o
为点s在坐标轴xb上的投影点;
[0040]
为点s
o
在动坐标系{b}中的横坐标;
[0041]
η为位置矢量
b
s与yb轴的夹角,单位为弧度;
[0042]
j和k分别为全局坐标系{g}的y轴和z轴方向的单位方向向量,表示为j=[0 1 0 0]
t
和k=[0 0 1 0]
t
;
b
s
o
为点so在动坐标系{b}下的位置矢量。
[0043]
优选地,所述根据盾构位置和姿态的齐次变换矩阵对盾构掘进过程受的负载进行建模求解各种分力,包括:刀盘所受的法向力、盾周法向力、盾周摩阻力、管片
‑
盾尾摩阻力与后配套拖曳阻力,包括:
[0044]
(1)刀盘所受的法向力f1的计算公式如下:
[0045][0046]
式中:
[0047]
α0为刀盘开口率;
[0048]
e为土体弹性模量,单位kpa;
[0049]
r1为刀盘半径,单位m;
[0050]
δ为刀盘贯入度,单位m/rev;
[0051]
μ为土体泊松比;
[0052]
k0为土体侧压力系数;
[0053]
γ'为开挖面前方土体的等效重度,单位为kn/m3;
[0054]
h
c
为刀盘面板中心点c的埋深,单位m;
[0055]
p
c
为盾构机土仓内的平均土压力,单位kpa;
[0056]
(2)刀盘所受的法向力在动坐标系原点b产生的力矩
b
m
b
(f1)的计算公式如下:
[0057]
b
m
b
(f1)=[0 (1
‑
α
o
)πk0γ'r
14
/4 0]
[0058]
(3)盾周法向力f2的计算公式如下:
[0059][0060]
式中:
[0061]
l
bc
为刀盘面板中心点c至动坐标系原点b的距离,单位m;
[0062]
l
r
为动坐标系原点b到盾壳尾端的距离,单位m;
[0063]
n
s
为点s的单位法向量,n
s
=[0 cosη sinη]
t
;
[0064]
σ
n
为点s的法向应力,单位kpa,σ
n
的计算公式为:
[0065]
σ
n
=k(u
n
,η)σ
v0
[0066]
k(u
n
,η)=k
v
(u
n
)sin2η+k
h
(u
n
)cos2η
[0067]
σ
v0
=γ'(h
b
‑
r
1 sinη)
[0068]
式中:
[0069]
σ
v0
为点s处初始竖向土压力;h
b
为盾构机中心轴线的埋深;
[0070]
k
v
(u
n
)和k
h
(u
n
)分别为地层竖向土压力系数和侧向土压力系数,计算公式为:
[0071][0072]
式中:下标s为方向指标,可取v竖向和h侧向;k
s0
为初始土压力系数;k
smin
为最小土压力系数;k
smax
为最大土压力系数;a
s
为k
v
(u
n
)和k
h
(u
n
)函数u
n
=0处的梯度;
[0073]
(4)盾周法向力f2在动坐标系原点b产生的等效力矩
b
m
b
(f2)的计算公式如下:
[0074][0075]
式中:r
bs
为点s在动坐标系{b}中的位置矢量,r
bs
=[x rcosη rsinη]
t
;
[0076]
(5)盾周摩阻力f3的计算公式如下:
[0077][0078]
式中:
[0079]
g为盾构主机的重力;
[0080]
为盾壳
‑
土体界面的摩擦角,单位度;
[0081]
(6)管片
‑
盾尾摩阻力f4的计算公式如下:
[0082]
b
f4=[
‑
n4μ4w
4 0 0]
t
[0083]
式中:n4为盾尾刷的圈数;μ4为盾构管片与盾尾刷的摩擦系数;w4为单环管片自重,单位kn;
[0084]
(7)后配套拖曳阻力f5的计算公式如下:
[0085]
b
f5=[
‑
μ5w5/r
r 0 0]
t
[0086]
式中:μ5为车轮与导轨间的滚动摩擦系数;w5为整个后配套设备的重力,单位kn;r
r
为后配套的车轮半径,单位m。
[0087]
优选地,所述将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获得油缸的分区推力,包括:
[0088]
(1)将所求各项负载向动坐标系原点b进行简化等效,等效为由力矢量
b
f和力矩矢量
b
m
b
构成的负载,等效负载
b
f
t
计算公式如下:
[0089][0090]
q是求和指标,可取1~5;
[0091]
(2)盾构推进系统等效负载到油缸推力的传力机制公式如下:
[0092]
f
d
=(j
+
)
t b
f
t
[0093]
其中,j
+
为盾构速度雅克比矩阵的穆尔
‑
彭罗斯广义逆,f
d
为所有油缸推进力矩阵,f
d
=[f
1 f2ꢀ…ꢀ
f
n
]
t
;
[0094]
(3)盾构推进油缸分区推力的计算公式如下:
[0095][0096]
式中:
[0097]
f
m
为l分区中第m根油缸的推力;
[0098]
l为推进油缸分区编号;
[0099]
n
gl
为第l个分区的油缸数量。
[0100]
一种盾构控制系统,包括:
[0101]
运动分析模块,建立盾构位姿坐标系统,根据盾构位姿坐标系构建盾构位置和姿态的齐次变换矩阵来描述盾构掘进过程中的位姿变化,并结合盾构参数求解盾构推进机构速度雅克比矩阵,以及根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移;
[0102]
负载计算模块,根据盾构位置和姿态的齐次变换矩阵对盾构掘进过程受的负载进行建模求解各种分力,包括:刀盘所受的法向力、盾周法向力、盾周摩阻力、管片
‑
盾尾摩阻力与后配套拖曳阻力;
[0103]
分区推力计算模块,将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获得油缸的分区推力。
[0104]
优选地,所述运动分析模块包括:
[0105]
盾构位姿坐标系统构建单元,用于建立固结在盾构机上的动坐标系{b}、固结在管片环上的基坐标系{a}和全局坐标系{g},具体包括:构建动坐标系{b
‑
xbybzb},该坐标系固结到中盾背板,原点b是油缸前球铰接的分布中心,在初始状态下,xb轴沿盾构机的中心轴指向掘进方向,zb轴垂直盾构机的中心轴并竖直向上,yb轴方向按右手原则确定;构建基坐标系{a
‑
xayaza},该坐标系固结到给推进油缸提供反力的管片环上,原点a是油缸后球铰接的分布中心,在初始状态下,基坐标系{a
‑
xayaza}和动坐标系{b
‑
xbybzb}各坐标轴对应平行;构建全局坐标系{g
‑
xyz},在初始状态下,全局坐标系{g
‑
xyz}和动坐标系{b
‑
xbybzb}各坐标轴对应平行;
[0106]
其中,l
bc
为刀盘面板中心到b点的距离;l为油缸套筒的长度;li为第i根液压油缸的伸长量;l
r
为动坐标系原点b到盾壳尾端的距离,r为中盾内壳半径;r0为液压油缸分布圆的半径;r1为刀盘半径;δr
i
为管片环外表面和盾尾壳内表面的距离,即盾尾间隙;
[0107]
盾构位姿矩阵计算单元,采用求解盾构位置和姿态的齐次变换矩阵来表示基坐标系{a}和动坐标系{b}之间的变换关系,计算盾构位姿矩阵来描述盾构掘进过程中的位姿变化:
[0108][0109]
式中:为从动坐标系{b}到基坐标系{a}的旋转矩阵,且
[0110][0111]
ψ,θ,分别表示盾构机的横滚角、俯仰角和偏航角;c和s分别代表余弦函数cos和正弦函数sin;
[0112]
为从基坐标系原点a到动坐标系原点b的平移向量,表示动坐标系{b}在基坐标系{a}中的位置,且
[0113][0114]
盾构推进机构速度雅克比矩阵计算单元,根据公式进行计算,
b
u为液压油缸的单位方向向量,且
b
u=[1 0 0]
t
;b
i
为第i根油缸前球铰在动坐标系{b}中位置矢量,i取1~n,n为油缸总根数;
[0115]
土体位移计算单元,根据公式
[0116]
进行计算,
[0117]
式中:u
n
为土体位移;为基坐标系{a}到全局坐标系{g}的齐次变换矩阵;为初始时刻的盾构位姿矩阵;为下一时刻的盾构位姿矩阵;
b
s为盾壳外表面任意一点s在动坐标系{b}下的位置矢量,用下式表示s
o
为点s在坐标轴xb上的投影点;为点s
o
在动坐标系{b}中的横坐标;η为位置矢量
b
s与yb轴的夹角,单位为弧度;j和k分别为全局坐标系{g}的y轴和z轴方向的单位方向向量,表示为j=[0 1 0 0]
t
和k=[0 0 1 0]
t
;
b
s
o
为点so在动坐标系{b}下的位置矢量。
[0118]
优选地,所述负载计算模块包括:
[0119]
刀盘所受的法向力计算单元,根据如下公式计算刀盘所受的法向力f1:
[0120][0121]
式中:α0为刀盘开口率;e为土体弹性模量,单位kpa;r1为刀盘半径,单位m;δ为刀盘贯入度,单位m/rev;μ为土体泊松比;k0为土体侧压力系数;γ'为开挖面前方土体的等效重度,单位为kn/m3;h
c
为刀盘中心点c的埋深,单位m;p
c
为盾构机土仓内的平均土压力,单位kpa;
[0122]
刀盘所受的法向力在动坐标系统原点b产生的力矩
b
m
b
(f1)的计算公式如下:
[0123]
b
m
b
(f1)=[0 (1
‑
α
o
)πk0γ'r
14
/4 0]
[0124]
盾周法向力计算单元,根据如下公司计算盾周法向力f2,
[0125][0126]
式中:l
bc
为刀盘面板中心点c至动坐标系原点b的距离,单位m;l
r
为动坐标系原点b到盾壳尾端的距离,单位m;n
s
为点s的单位法向量,n
s
=[0 cosη sinη]
t
;σ
n
为点s处的法向应力,单位kpa,σ
n
的计算公式为:
[0127]
σ
n
=k(u
n
,η)σ
v0
[0128]
k(u
n
,η)=k
v
(u
n
)sin2η+k
h
(u
n
)cos2η
[0129]
σ
v0
=γ'(h
b
‑
r1sinη)
[0130]
式中:σ
v0
为点s处初始竖向土压力;h
b
为盾构机中心轴线的埋深;
[0131]
k
v
(u
n
)和k
h
(u
n
)分别为地层竖向土压力系数和侧向土压力系数,计算公式为:
[0132][0133]
式中:下标s为方向指标,可取v竖向和h侧向;k
s0
为初始土压力系数;k
smin
为最小土压力系数;k
smax
为最大土压力系数;a
s
为k
v
(u
n
)和k
h
(u
n
)函数u
n
=0处的梯度;
[0134]
盾周法向力f2在动坐标系原点b产生的等效力矩
b
m
b
(f2)的计算公式如下:
[0135]
[0136]
式中:r
bs
为点s在动坐标系{b}中的位置矢量,r
bs
=[x r1cosη r1sinη]
t
;
[0137]
盾周摩阻力计算单元,根据如下公式计算盾周摩阻力f3[0138][0139]
式中:g为盾构主机的重力;盾壳
‑
土体界面的摩擦角,单位度;
[0140]
管片
‑
盾尾摩阻力计算单元,根据如公式计算管片
‑
盾尾摩阻力f4[0141]
b
f4=[
‑
n4μ4w
4 0 0]
t
[0142]
式中:n4为盾尾刷的圈数;μ4为盾构管片与盾尾刷的摩擦系数;w4为单环管片自重,单位kn;
[0143]
后配套拖曳阻力计算单元,根据如下公式计算后配套拖曳阻力f5[0144]
b
f5=[
‑
μ5w5/r
r 0 0]
t
[0145]
式中:μ5为车轮与导轨间的滚动摩擦系数;w5为整个后配套设备的重力,单位kn;r
r
为后配套的车轮半径,单位m。
[0146]
优选地,所述分区推力计算模块包括分力计算单元,所述分力计算单元根据计算盾构掘进过程中的等效负载,q是求和指标,可取1~5;通过传力机制公式f
d
=(j
+
)
t b
f
t
将盾构推进系统等效负载到油缸推力,并根据公式计算盾构推进油缸分区推力,其中,j
+
为盾构速度雅克比矩阵的穆尔
‑
彭罗斯广义逆,f
d
为所有油缸推进力矩阵,f
d
=[f
1 f2ꢀ…ꢀ
f
n
]
t
,f
m
为l分区中第m根油缸的推力;l为推进油缸分区编号;n
gj
为第l个分区的油缸数量。
[0147]
由上述本发明的实施例提供的技术方案可以看出,本发明实施例提供了一种盾构控制方法及其系统,具有以下有益效果:(1)基于盾构掘进过程中盾构机
‑
土动态相互作用,结合盾构推进机构传力机制特点来计算盾构掘进推进油缸分区推力,确定了使盾构机实现既定目标运动的推力值,为盾构机姿态调整和轨迹跟踪控制提供了理论依据;(2)考虑盾构掘进参数、土体参数和盾构机
‑
土体相互作用等因素,具有较高的计算精度和工程适用性;(3)本发明直接给出了盾构掘进过程不同状态所需要的分区推力,可以直接为盾构司机或是智能推进系统推力设定提供依据。
[0148]
本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0149]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0150]
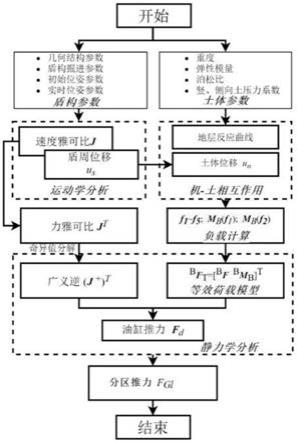
图1为本发明实施例提供的一种盾构控制方法流程图;
[0151]
图2为本发明实施例提供的盾构推进机构及坐标布置示意图;
[0152]
图3为本发明实施例提供的盾构等效负载模型示意图。
[0153]
附图标记:
[0154]
1:刀盘面板;2:中盾背板;3:推进油缸前球铰;4:油缸套筒;5:法兰板;6:活塞杆;7:推进油缸后球铰;8:管片环;9:盾壳。
具体实施方式
[0155]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0156]
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
[0157]
本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0158]
为便于对本发明实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且实施例并不构成对本发明实施例的限定。
[0159]
实施例一
[0160]
以某地铁盾构工程为实施例进一步说明。
[0161]
如图1所示为本发明提供的一种盾构控制方法流程图,具体包括以下步骤:
[0162]
步骤一、建立盾构位姿坐标系统,根据盾构位姿坐标系构建盾构位置和姿态的齐次变换矩阵来描述盾构掘进过程中的位姿变化,并结合盾构参数求解盾构推进机构速度雅克比矩阵,以及根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移。
[0163]
(1)建立盾构位姿坐标系统
[0164]
如图2所示的盾构推进机构及坐标布置示意图。某地铁盾构工程用的土压平衡盾构参数如下:
[0165]
盾构主机总长l
total
=8.2m,自重约5300kn,刀盘半径r1=3.4m,刀盘开口率α0=41%,盾构前盾长度l
bc
=2.1m,中后盾长度l
r
=6.1m。盾构推进油缸布置方式为16双缸均匀布置,上下左右四个分区(a区、b区、c区和d区),各分区油缸数量分别为6、10、8、8。推进油缸分布半径为3.11m,油缸规格为230/200
‑
2200mm,单环管片重量w4=215kn,后配套总重w5=1800kn,后配套车轮半径r
r
=150mm,刀盘中心埋深h
c
=18.87m,盾壳
‑
土体界面的摩擦角土体界面的摩擦角盾构管片与盾尾刷的摩擦系数μ4=0.2,车轮与导轨间的滚动摩擦系数μ5=0.05。以该工程掘进352环时的地层参数和掘进状态参数为例,给出计算掘进该环时某两个相邻时刻的推进油缸分区推力,其他时刻计算均可按照相同方法计算。
[0166]
计算中所涉及的地层参数来自地勘报告,该工程第352环时盾构全断面处于粉砂夹粉土层,参数如下:土体等效重度γ'=18.4kn/m3,弹性模量e=17520kpa,泊松比μ=0.32,静止侧压力系数k0=0.48,垂直基床系数k
v
=22kn/m3,水平基床系数k
h
=24。
[0167]
计算中所涉及的盾构掘进参数均来自设备数据采集系统,取该工程掘进352环时某一时刻的掘进参数:刀盘贯入度δ=0.0544m/rev,土仓平均土压力p
c
=187kpa。
[0168]
如图2所示,本发明的实施例提供了一种盾构控制方法流程。具体包括以下步骤:
[0169]
(2)通过导向系统数据计算得到初始的盾构位姿矩阵和当前时刻的位姿矩阵
[0170][0171][0172]
(3)计算当前时刻盾构推进机构的速度雅克比矩阵j
[0173]
由计算得到
[0174][0175]
(4)计算盾构位姿改变引起的周围土体法向位移u
n
[0176]
由计算得到u
n
=f(x
so
,η),形式较为复杂,这里不予展示。
[0177]
步骤二、根据盾构位置和姿态的齐次变换矩阵对盾构掘进过程受的负载进行建模求解各种分力,包括:刀盘所受的法向力、盾周法向力、盾周摩阻力、管片
‑
盾尾摩阻力与后配套拖曳阻力。
[0178]
(1)计算刀盘所受的法向力f1:
[0179]
由计算得到
[0180]
b
f1=[
‑
7911.88 0 0]
t
kn
[0181]
(2)计算刀盘所受的法向力在b点产生的力矩
b
m
b
(f1):
[0182]
由
b
m
b
(f1)=[0 (1
‑
α
o
)πk0γ'r
14
/4 0],计算得到
b
m
b
(f1)=[0 560.70 0]
t
kn
·
m
[0183]
(3)计算盾周法向力f2:
[0184]
由计算得到
b
f2=[0
ꢀ‑
294.40 5059.49]
t
kn
[0185]
(4)计算盾周法向力f2在动坐标系原点b产生的等效力矩
b
m
b
(f2):
[0186]
由计算得到
b
m
b
(f2)=[0 7831.45
ꢀ‑
1808.60]
t
kn
·
m
[0187]
(5)计算盾周摩阻力f3:
[0188]
由计算得到
b
f3=[
‑
7165.33 0 0]
t
kn
[0189]
(6)计算管片
‑
盾尾摩阻力f4:
[0190]
由
b
f4=[
‑
n4μ4w
4 0 0]
t
,计算得到
b
f4=[
‑
107.15 0 0]
t
kn
[0191]
式中:n4为盾尾刷的圈数,一般取3。
[0192]
(7)计算后配套拖曳阻力f5:
[0193]
由
b
f5=[
‑
μ5w5/r
r 0 0]
t
,计算得到
b
f5=[
‑
60 0 0]
t
kn
[0194]
第三步、将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获得油缸的分区推力。
[0195]
(1)如图3所示建立盾构等效负载模型,计算盾构推进机构的等效负载由计算得到
[0196]
b
f
t
=[
‑
15244.37kn
ꢀ‑
68.37kn 4820.86kn 0kn
·
m 9971.31kn
·
m 1808.60kn
·
m]
t
[0197]
(2)计算盾构推进机构雅克比矩阵穆尔
‑
彭罗斯广义逆(j
+
)
t
的转置计算得到:
[0198]
(3)计算盾构推进机构的分区推力
[0199]
由计算得到
[0200]
a区油缸推力:f
ga
=1930.01kn
[0201]
b区油缸推力:f
gb
=3310.72kn
[0202]
c区油缸推力:f
gc
=6194.01kn
[0203]
d区油缸推力:f
gd
=3827.05kn
[0204]
至此,已完成计算该工程中盾构掘进352环时某一时刻的推进油缸的四个分区推力值,掘进至其他时刻时的分区推力均可按照相同方法确定。
[0205]
本发明所述方法考虑了盾构掘进过程中盾构机
‑
土动态相互作用,结合推进机构
自身传力机制特点,确定了分区油缸推力,为盾构机姿态调整和轨迹跟踪控制提供了理论依据。
[0206]
实施例二
[0207]
该实施例提供了一种盾构控制系统,具体可以包括如下的模块:
[0208]
运动分析模块,建立盾构位姿坐标系统,根据盾构位姿坐标系构建盾构位置和姿态的齐次变换矩阵来描述盾构掘进过程中的位姿变化,并结合盾构参数求解盾构推进机构速度雅克比矩阵,以及根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移;
[0209]
负载计算模块,根据盾构位置和姿态的齐次变换矩阵对盾构掘进过程受的负载进行建模求解各种分力,包括:刀盘所受的法向力、盾周法向力、盾周摩阻力、管片
‑
盾尾摩阻力与后配套拖曳阻力;
[0210]
分区推力计算模块,将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获得油缸的分区推力。
[0211]
进一步地,运动分析模块包括:
[0212]
盾构位姿坐标系统构建单元,用于建立固结在盾构机上的动坐标系{b}、固结在管片环上的基坐标系{a}和全局坐标系{g},具体包括:构建动坐标系{b
‑
xbybzb},该坐标系固结到中盾背板,原点b是油缸前球铰接的分布中心,在初始状态下,xb轴沿盾构机的中心轴指向掘进方向,zb轴垂直盾构机的中心轴并竖直向上,yb轴方向按右手原则确定;构建基坐标系{a
‑
xayaza},该坐标系固结到给推进油缸提供反力的管片环上,原点a是油缸后球铰接的分布中心,在初始状态下,基坐标系{a
‑
xayaza}和动坐标系{b
‑
xbybzb}各坐标轴对应平行;构建全局坐标系{g
‑
xyz},在初始状态下,全局坐标系{g
‑
xyz}和动坐标系{b
‑
xbybzb}各坐标轴对应平行。
[0213]
其中,l
bc
为刀盘面板中心到b点的距离;l为油缸套筒的长度;li为第i根液压油缸的伸长量;l
r
为动坐标系原点b到盾壳尾端的距离,r为中盾内壳半径;r0为液压油缸分布圆的半径;r1为刀盘半径;δr
i
为管片环外表面和盾尾壳内表面的距离,即盾尾间隙。
[0214]
盾构位姿矩阵计算单元,采用求解盾构位置和姿态的齐次变换矩阵来表示基坐标系{a}和动坐标系{b}之间的变换关系,计算盾构位姿矩阵来描述盾构掘进过程中的位姿变化:
[0215][0216]
式中:为从动坐标系{b}到基坐标系{a}的旋转矩阵,且
[0217][0218]
ψ,θ,分别表示盾构机的横滚角、俯仰角和偏航角;c和s分别代表余弦函数cos和正弦函数sin;
[0219]
为从基坐标系原点a到动坐标系原点b的平移向量,表示动坐标系{b}在基坐标
系{a}中的位置,且
[0220][0221]
盾构推进机构速度雅克比矩阵计算单元,根据公式进行计算,
b
u为液压油缸的单位方向向量,且
b
u=[1 0 0]
t
;b
i
为第i根油缸前球铰在动坐标系{b}中位置矢量,i取1~n,n为油缸总根数。
[0222]
土体位移计算单元,根据公式
[0223]
进行计算,
[0224]
式中:u
n
为土体位移;为基坐标系{a}到全局坐标系{g}的齐次变换矩阵;为初始时刻的盾构位姿矩阵;为下一时刻的盾构位姿矩阵;
b
s为盾壳外表面任意一点s在动坐标系{b}下的位置矢量,用下式表示s
o
为点s在坐标轴xb上的投影点;为点s
o
在动坐标系{b}中的横坐标;η为位置矢量
b
s与yb轴的夹角,单位为弧度;j和k分别为全局坐标系{g}的y轴和z轴方向的单位方向向量,表示为j=[0 1 0 0]
t
和k=[0 0 1 0]
t
;
b
s
o
为点so在动坐标系{b}下的位置矢量。
[0225]
进一步地,负载计算模块包括:
[0226]
刀盘所受的法向力计算单元,根据如下公式计算刀盘所受的法向力f1:
[0227][0228]
式中:α0为刀盘开口率;e为土体弹性模量,单位kpa;r1为刀盘半径,单位m;δ为刀盘贯入度,单位m/rev;μ为土体泊松比;k0为土体侧压力系数;γ'为开挖面前方土体的等效重度,单位为kn/m3;h
c
为刀盘中心点c的埋深,单位m;p
c
为盾构机土仓内的平均土压力,单位kpa。
[0229]
刀盘所受的法向力在动坐标系统原点b产生的力矩
b
m
b
(f1)的计算公式如下:
[0230]
b
m
b
(f1)=[0 (1
‑
α
o
)πk0γ'r
14
/4 0]
[0231]
盾周法向力计算单元,根据如下公司计算盾周法向力f2,
[0232][0233]
式中:l
bc
为刀盘面板中心点c至动坐标系原点b的距离,单位m;l
r
为动坐标系原点b到盾壳尾端的距离,单位m;n
s
为点s的单位法向量,n
s
=[0 cosη sinη]
t
;σ
n
为点s处的法向
应力,单位kpa,σ
n
的计算公式为:
[0234]
σ
n
=k(u
n
,η)σ
v0
[0235]
k(u
n
,η)=k
v
(u
n
)sin2η+k
h
(u
n
)cos2η
[0236]
σ
v0
=γ'(h
b
‑
r
1 sinη)
[0237]
式中:σ
v0
为点s处初始竖向土压力;h
b
为盾构机中心轴线的埋深;
[0238]
k
v
(u
n
)和k
h
(u
n
)分别为地层竖向土压力系数和侧向土压力系数,计算公式为:
[0239][0240]
式中:下标s为方向指标,可取v竖向和h侧向;k
s0
为初始土压力系数;k
smin
为最小土压力系数;k
smax
为最大土压力系数;a
s
为k
v
(u
n
)和k
h
(u
n
)函数u
n
=0处的梯度。
[0241]
盾周法向力f2在动坐标系原点b产生的等效力矩
b
m
b
(f2)的计算公式如下:
[0242][0243]
式中:r
bs
为点s在动坐标系{b}中的位置矢量,r
bs
=[x r1cosη r1sinη]
t
。
[0244]
盾周摩阻力计算单元,根据如下公式计算盾周摩阻力f3[0245][0246]
式中:g为盾构主机的重力;盾壳
‑
土体界面的摩擦角,单位度。
[0247]
管片
‑
盾尾摩阻力计算单元,根据如公式计算管片
‑
盾尾摩阻力f4[0248]
b
f4=[
‑
n4μ4w
4 0 0]
t
[0249]
式中:n4为盾尾刷的圈数;μ4为盾构管片与盾尾刷的摩擦系数;w4为单环管片自重,单位kn。
[0250]
后配套拖曳阻力计算单元,根据如下公式计算后配套拖曳阻力f5[0251]
b
f5=[
‑
μ5w5/r
r 0 0]
t
[0252]
式中:μ5为车轮与导轨间的滚动摩擦系数;w5为整个后配套设备的重力,单位kn;r
r
为后配套的车轮半径,单位m。
[0253]
进一步地,分区推力计算模块包括分力计算单元,该分力计算单元根据计算盾构掘进过程中的等效负载,q是求和指标,可取1~5;通过传力机制公式f
d
=(j
+
)
t b
f
t
将盾构推进系统等效负载到油缸推力,并根据公式计算盾构推进油缸分区推力,其中,j
+
为盾构速度雅克比矩阵的穆尔
‑
彭罗斯广义逆,f
d
为所有油缸推进力矩阵,f
d
=[f
1 f2ꢀ…ꢀ
f
n
]
t
,f
m
为l分区中第m根油缸的推力;l为推进油缸分区编号;n
gj
为第l个分区的油缸数量。
[0254]
综上所述,本发明提供的一种盾构控制方法及其系统,通过构建盾构位姿坐标系统,根据盾周位移与盾构位姿的关系获得盾构位姿变化引起附近的土体位移;通过建模获
得各种分力,再通过将所求各项负载向动坐标系原点进行简化等效,建立盾构等效负载模型以获得油缸的分区推力,增加了盾构机姿态调整和轨迹跟踪的控制精度。
[0255]
本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本发明所必须的。
[0256]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于装置或系统实施例而言,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所描述的装置及系统实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0257]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1