一种适应海底微地形的富钴结壳破碎头
1.本发明涉及富钴结壳开采技术领域,特别涉及一种适应海底微地形的富钴结壳破碎头。
背景技术:
2.由于富钴结壳层通常依附在基岩层上,基岩的强度比富钴结壳大很多,且海底微地形和矿层结构复杂,矿区富钴结壳矿层的厚度以及微地形的变化均会影响矿层开采的效率;传统的适应海底微地形的富钴结壳破碎头有一些缺点,使用单一滚筒破碎头对结壳进行破碎后进行收集在面对海底复杂的微地形环境时存问题,无法实现矿石的充分破碎,部分凹陷部位的矿石无法开采,导致矿石资源浪费,遇到凸起的地形时,单一破碎头可能会破碎到基岩层,最后导致无用的基岩会被输送到母船,导致功率的浪费,降低系统效率,其次海底地形复杂,从而导致不便于破碎机构移动。
技术实现要素:
3.本发明的主要目的在于提供一种适应海底微地形的富钴结壳破碎头,可以有效解决背景技术中的问题。
4.为实现上述目的,本发明采取的技术方案为:
5.一种适应海底微地形的富钴结壳破碎头,包括车架、销轴,所述车架的前端通过销轴活动设置有子破碎头,所述子破碎头的内壁安装有液压缸,所述子破碎头包括有破碎滚筒、动臂,所述动臂的内侧与破碎滚筒的外侧活动连接,所述破碎滚筒包括活动设置在动臂内侧的旋转筒体,所述动臂的下端固定设置有马达端盖,所述马达端盖的一端固定设置有液压马达,所述液压马达的另一端通过转轴活动设置有减速器,所述马达端盖的一端靠近液压马达的上侧活动设置有压紧盖板,所述压紧盖板的一端固定设置有小弹簧,所述旋转筒体的一端固定设置有滑动轴承。
6.优选的,所述旋转筒体的上端固定设置有截齿座,所述截齿座的上端安装有破碎截齿。
7.优选的,所述动臂的内壁固定设置有编码器端盖,所述编码器端盖的表面安装有编码器支架。
8.优选的,所述编码器支架的下端固定设置有转速编码器,所述旋转筒体的另一端固定设置有磁联轴器。
9.优选的,所述车架的一端固定设置有履带支撑架,所述履带支撑架的上端活动设置有导向轮,所述导向轮的外侧传动设置有履带主体。
10.优选的,所述履带支撑架通过导向轮与履带主体活动连接,所述履带支撑架的数量有两组,两组所述履带支撑架呈中心对称关系。
11.优选的,所述旋转筒体的上端固定设置有截齿座,所述截齿座的上端安装有破碎截齿,所述动臂的内壁固定设置有编码器端盖。
12.优选的,所述编码器端盖的表面安装有编码器支架,所述编码器支架的下端固定设置有转速编码器,所述旋转筒体的另一端固定设置有磁联轴器。
13.与现有技术相比,本发明具有如下有益效果:
14.1、结构紧凑,非常适用于深海底复杂微地形环境中矿石的开采。这种破碎头能够实现在海底起伏不定的微地形和未知矿层厚度的环境中紧贴基岩表面,帮助富钴结壳采矿车提高矿石的开采效率和系统的工作效率,并且能够实时监控破碎头的转速,从而控制矿石破碎的粒径,提高矿石后处理的效率。
15.2、通过履带支撑架控制导向轮的转动从而使得导向轮带动履带主体移动,可以达到便于在复杂地形下移动的目的。
附图说明
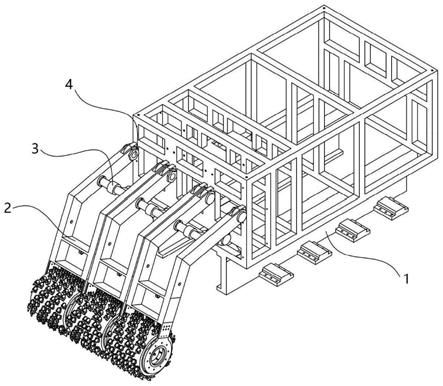
16.图1为本发明一种适应海底微地形的富钴结壳破碎头的整体透视图结构示意图;
17.图2为本发明一种适应海底微地形的富钴结壳破碎头的破碎滚筒和动臂的爆炸图;
18.图3为本发明一种适应海底微地形的富钴结壳破碎头的破碎滚筒截面图;
19.图4为本发明一种适应海底微地形的富钴结壳破碎头的局部结构示意图。
20.图中:1、车架;2、子破碎头;3、液压缸;4、销轴;5、破碎滚筒;6、动臂;7、履带支撑架;8、导向轮;9、履带主体;10、旋转筒体;11、马达端盖;12、液压马达;13、减速器;14、小弹簧;15、压紧盖板;16、滑动轴承;17、破碎截齿;18、截齿座;19、编码器端盖;20、编码器支架;21、转速编码器;22、磁联轴器。
具体实施方式
21.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
22.如图1
‑
4所示,一种适应海底微地形的富钴结壳破碎头,包括车架1、销轴4,车架1的前端通过销轴4活动设置有子破碎头2,子破碎头2的内壁安装有液压缸3,子破碎头2包括有破碎滚筒5、动臂6,动臂6的内侧与破碎滚筒5的外侧活动连接,破碎滚筒5包括活动设置在动臂6内侧的旋转筒体10,动臂6的下端固定设置有马达端盖11,马达端盖11的一端固定设置有液压马达12,液压马达12的另一端通过转轴活动设置有减速器13,马达端盖11的一端靠近液压马达12的上侧活动设置有压紧盖板15,压紧盖板15的一端固定设置有小弹簧14,旋转筒体10的一端固定设置有滑动轴承16。
23.其中,旋转筒体10的上端固定设置有截齿座18,截齿座18的上端安装有破碎截齿17,动臂6的内壁固定设置有编码器端盖19,编码器端盖19的表面安装有编码器支架20,编码器支架20的下端固定设置有转速编码器21,旋转筒体10的另一端固定设置有磁联轴器22。
24.而且,液压缸3中安装有油压传感器,控制系统通过监控油压的参数实时控制液压缸3的伸出长度,从而调整子破碎头2绕销轴4旋转的角度,进而控制子破碎头2的切削深度,保证破碎头工作时贴紧基岩,提高矿石的采集率,三组子破碎头2并排独立布置,实现了多个破碎头在整个作业面宽度上不同微地形的适应性,旋转筒体10旋转时会带动磁联轴器22
一同旋转,安装在磁联轴器22上的磁铁通过磁力进一步带动转速编码器21内的转子旋转,控制系统利用转速编码器21输出的信号获取子破碎头2实时的转速信息后,通过匹配子破碎头2的转速和行进速度来控制破碎的粒径,该破碎头通过上述紧凑高效的结构实现了富钴结壳破碎头对海底微地形的适应性和对矿石破碎粒径的控制。
25.其中,车架1的一端固定设置有履带支撑架7,履带支撑架7的上端活动设置有导向轮8,导向轮8的外侧传动设置有履带主体9,履带支撑架7通过导向轮8与履带主体9活动连接,履带支撑架7的数量有两组,两组履带支撑架7呈中心对称关系。
26.而且,当遇到复杂地形时,首先履带主体9接触到地面,从而使得履带支撑架7控制导向轮8的转动,由于导向轮8与履带主体9之间为传动连接,所以导向轮8的转动使得履带主体9移动,从而使得履带主体9在复杂地形上移动,使得装置移动到指定位置,通过履带支撑架7控制导向轮8的转动从而使得导向轮8带动履带主体9移动,可以达到便于在复杂地形下移动的目的。
27.本实施例中,当遇到复杂地形时,首先履带主体9接触到地面,从而使得履带支撑架7控制导向轮8的转动,由于导向轮8与履带主体9之间为传动连接,所以导向轮8的转动使得履带主体9移动,从而使得履带主体9在复杂地形上移动,使得装置移动到指定位置。
28.而且,通过履带支撑架7控制导向轮8的转动从而使得导向轮8带动履带主体9移动,可以达到便于在复杂地形下移动的目的。
29.液压缸3中安装有油压传感器,控制系统通过监控油压的参数实时控制液压缸3的伸出长度,从而调整子破碎头2绕销轴4旋转的角度,进而控制子破碎头2的切削深度,保证破碎头工作时贴紧基岩,提高矿石的采集率,三组子破碎头2并排独立布置,实现了多个破碎头在整个作业面宽度上不同微地形的适应性,旋转筒体10旋转时会带动磁联轴器22一同旋转,安装在磁联轴器22上的磁铁通过磁力进一步带动转速编码器21内的转子旋转,控制系统利用转速编码器21输出的信号获取子破碎头2实时的转速信息后,通过匹配子破碎头2的转速和行进速度来控制破碎的粒径。
30.本发明中的破碎头实现在海底起伏不定的微地形和未知矿层厚度的环境中紧贴基岩表面,帮助富钴结壳采矿车提高矿石的开采效率和系统的工作效率,并且能够实时监控破碎头的转速,从而控制矿石破碎的粒径,提高矿石后处理的效率。
31.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1