一种水平定向钻机动力头推拉微动控制装置及其控制方法与流程
1.本发明涉及一种水平定向钻机动力头推拉微动控制装置及其控制方法,属于水平定向钻机技术领域。
背景技术:
2.水平定向钻机施工一般有三道工序,首先进行导向钻进,然后进行回扩,逐级扩大孔径,最后将管道回托完成施工。但是在硬岩工况下进行回扩作业,动力头推拉速度要求特别低。一般情况下,在动力头旋转速度起来后,机手缓慢后拉推拉手柄,时刻观察扭矩大小,根据操作经验,非常谨慎操作推拉手柄,操作要求非常高,手柄后拉过度,扭矩会迅速提升到警戒值,手柄后拉不够,严重影响施工效率,推拉速度最好能迅速调整到最佳位置。这个过程的难点在于钻机推拉控制精度低,钻机手需要一定时间去反复微控推拉手柄,才能达到最佳推拉速度,大大增加了操作难度,同时严重影响施工进度。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种水平定向钻机动力头推拉微动控制装置及其控制方法,能够提高水平定向钻机动力头的移动精度,避免因推拉速度控制难而造成的旋转扭矩大、成孔效果不佳的问题。为达到上述目的,本发明是采用下述技术方案实现的:第一方面,本发明提供了一种水平定向钻机动力头推拉微动控制装置,包括:液压系统、控制器、指令系统和执行系统,所述指令系统包括用于选择水平定向钻机头的微动状态的推拉微动开关、用于选择水平定向钻机头的高速状态的推拉高速开关,以及用于控制水平定向钻机头的前进和后退的推拉手柄;所述控制器的输入端与推拉手柄、推拉高速开关和推拉微动开关电连接,所述控制器的输出端连接所述执行系统,所述执行系统调用所述液压系统实现对水平定向钻机动力头的控制。
4.结合第一方面,进一步地,所述执行系统包括推拉主阀和马达组,所述推拉主阀的信号输入端连接所述控制器,推拉主阀的输入端所述液压系统,推拉主阀的输出端连接所述马达组。
5.结合第一方面,进一步地,所述推拉主阀包括并联的第一联阀和第二联阀,所述马达组包括并联的1号马达和2号马达,第一联阀和第二联阀的出口a通过管路连接1号马达的a口,1号马达的b口通过管路连接2号马达的a口,第一联阀和第二联阀的出口b通过管路连接2号马达的b口。
6.结合第一方面,优选地,所述第一联阀包括第一联前推电磁阀y1和第一联后拉电磁阀y2,第二联阀包括第二联前推电磁阀y3和第二联后拉电磁阀y4。
7.结合第一方面,优选地,所述第一联阀和第二联阀为换向阀。
8.结合第一方面,优选地,第一联前推电磁阀y1和第一联后拉电磁阀y2的设计流量为190l/min。
9.结合第一方面,优选地,第二联前推电磁阀y3和第二联后拉电磁阀y4的设计流量为50l/min。
10.结合第一方面,进一步地,所述马达组还包括用于改变马达排量的1号马达电磁阀y7和2号马达电磁阀y8,所述1号马达电磁阀y7与1号马达连接,所述2号马达电磁阀y8与2号马达连接。
11.结合第一方面,优选地,1号马达电磁阀y7和2号马达电磁阀y8控制马达组的排量大小,不控制马达组是否动作。
12.结合第一方面,进一步地,所述液压系统包括液压油箱和主泵,所述主泵的进油口连接所述液压油箱,将液压油箱内的油料泵入所述推拉主阀,所述油料从所述推拉主阀流入马达组,多余油料回流至所述液压油箱。
13.结合第一方面,优选地,所述控制器采用ttc60高速控制器,控制器通过101、127、128、271号针脚与电源连接,控制器通过102号针脚与所述水平定向钻机动力头推拉装置的地线连接。
14.结合第一方面,优选地,所述推拉手柄采用jc6000电控手柄,推拉手柄的正极与电源连接,推拉手柄的负极与控制器的126号管脚连接,推拉手柄的信号线与控制器的114号管脚连接。
15.结合第一方面,优选地,所述推拉高速开关采用yb
‑
01开关,推拉高速开关的3号针脚与电源连接,推拉高速开关的5号针脚与控制器的255号管脚连接。
16.结合第一方面,优选地,所述推拉微动开关采用yb
‑
01,推拉微动开关的3号针脚与电源连接,推拉微动开关的5号针脚与控制器的256号管脚连接。
17.结合第一方面,优选地,所述第一联前推电磁阀y1的一端与控制器的106号针脚连接,第一联前推电磁阀y1的另一端与所述水平定向钻机动力头推拉装置的地线连接。
18.结合第一方面,优选地,所述第一联后拉电磁阀y2的一端与控制器的117号针脚连接,第一联后拉电磁阀y2的另一端与所述水平定向钻机动力头推拉装置的地线连接。
19.结合第一方面,优选地,所述第二联前推电磁阀y3的一端与控制器的144号针脚连接,第二联前推电磁阀y3的另一端与所述水平定向钻机动力头推拉装置的地线连接。
20.结合第一方面,优选地,所述第二联后拉电磁阀y4的一端与控制器的132号针脚连接,第二联后拉电磁阀y4的另一端与所述水平定向钻机动力头推拉装置的地线连接。
21.结合第一方面,优选地,所述1号马达电磁阀y7的一端与控制器的142号针脚连接,1号马达电磁阀y7的另一端与所述水平定向钻机动力头推拉装置的地线连接。
22.结合第一方面,优选地,所述2号马达电磁阀y8的一端与控制器的130号针脚连接,2号马达电磁阀y8的另一端与所述水平定向钻机动力头推拉装置的地线连接。
23.第二方面,基于第一方面的一种水平定向钻机动力头推拉微动控制方法,包括:控制器接收指令系统发送的微动、高速、前进、后退指令,向执行系统输出相应的运行指令;执行系统根据运行指令,调用液压系统实现对水平定向钻机动力头的低速前进、低速后退、微动前进、微动后退、高速前进、高速后退控制;其中,指令系统仅发送前进/后退
指令的情况下,实现对水平定向钻机动力头低速控制。
24.结合第二方面,进一步地,在推拉微动开关开启的情况下,推拉高速开关失效,推拉手柄前推,控制器控制第二联前推电磁阀y3得电,水平定向钻机动力头微动前进;推拉手柄后拉,控制器控制第二联后拉电磁阀y4得电,水平定向钻机动力头微动后退。
25.结合第二方面,进一步地,在推拉微动开关关闭,且推拉高速开关开启的情况下:推拉手柄前推,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组小排量正转,控制器控制推拉主阀的第一联前推电磁阀y1得电,水平定向钻机动力头高速前进;推拉手柄后拉,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组小排量反转,控制器控制推拉主阀的第一联后拉电磁阀y2得电,水平定向钻机动力头高速后退。
26.结合第二方面,进一步地,在推拉微动开关关闭,且推拉高速开关关闭的情况下:推拉手柄前推,控制器控制推拉主阀的第一联前推电磁阀y1得电,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组大排量正转,水平定向钻机动力头低速前进;推拉手柄后拉,控制器控制推拉主阀的第一联后拉电磁阀y2得电,控制器)通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组大排量反转,水平定向钻机动力头低速后退。
27.结合第二方面,优选地,所述控制器将推拉手柄输出的线性曲线转换成非线性曲线。
28.结合第二方面,优选地,所述非线性曲线为前半段斜率低、后半段斜率高的曲线。
29.与现有技术相比,本发明实施例所提供的一种水平定向钻机动力头推拉微动控制装置及其控制方法,所达到的有益效果包括:本发明提供的液压系统、控制器、指令系统和执行系统,所述指令系统包括用于选择水平定向钻机头的微动、低速和高速状态的推拉高速开关和推拉微动开关,以及用于控制水平定向钻机头的前进和后退的推拉手柄;所述控制器的输入端与推拉手柄、推拉高速开关和推拉微动开关电连接,所述控制器的输出端连接所述执行系统,所述执行系统调用所述液压系统实现对水平定向钻机动力头的控制;能够控制水平定向钻机动力头执行低速前进和低速后退、微动前进和微动后退、高速前进和高速后退的动作;能够提高水平定向钻机动力头的移动精度;水平定向钻机动力头的推拉控制精度高,能够避免因推拉速度控制难而造成的旋转扭矩大、成孔效果不佳的问题;避免反复微控推拉手柄达到最佳推拉速度,能够降低操作难度,加快施工进度。
附图说明
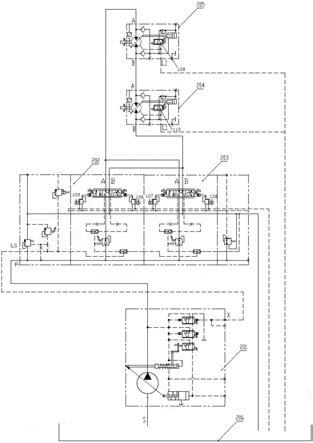
30.图1是本发明提供的一种水平定向钻机动力头推拉微动控制装置的液压控制原理示意图;图2是本发明提供的一种水平定向钻机动力头推拉微动控制装置的电气控制原理
示意图;图3是本发明提供的一种水平定向钻机动力头推拉微动控制装置的手柄输出曲线。
31.图中:101、控制器;102、推拉手柄;103、拖拉高速开关;104、推拉微动开关;105、第一联前推电磁阀y1;106、第一联后拉电磁阀y2;107、第二联前推电磁阀y3;108、第二联后拉电磁阀y4;109、1号马达电磁阀y7;110、2号马达电磁阀y8;201、主泵;202、第一联阀;203、第二联阀;204、2号马达;205、1号马达;206、液压油箱;301、线性曲线;302、非线性曲线。
具体实施方式
32.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
33.实施例一:如图1所示,一种水平定向钻机动力头推拉微动控制装置,包括液压系统、控制器101、指令系统和执行系统。
34.液压系统包括液压油箱206和主泵201,主泵201通过连接盘固定在发动机上。主泵201的进油口连接液压油箱206,主泵201的出油口连接推拉主阀的进油端。
35.控制器101采用ttc60高速控制器。
36.指令系统包括推拉手柄102、推拉高速开关103和推拉微动开关104,推拉手柄102、推拉高速开关103和推拉微动开关104与控制器101的输入端电连接。推拉手柄102采用jc6000电控手柄,推拉高速开关103采用yb
‑
01开关,推拉微动开关104采用yb
‑
01开关。
37.执行系统包括推拉主阀和马达组,控制器101的输出端与推拉主阀、马达组电连接。推拉主阀的出油端连接马达组,推拉主阀的回油口连接液压油箱206。推拉主阀包括第一联阀202和第二联阀203,第一联阀202和第二联阀203为换向阀。具体的,第一联阀202包括第一联前推电磁阀y1 105和第一联后拉电磁阀y2 106,第一联阀202的设计流量为190l/min。第二联阀203包括第二联前推电磁阀y3 107和第二联后拉电磁阀y4 108,为小流量专用电磁阀,第二联阀203的设计流量为50l/min。
38.马达组包括并联的1号马达205和2号马达204,第一联阀202和第二联阀203的出口a同时通过管路连接1号马达205的a口,1号马达205的b口通过管路连接2号马达204的a口,第一联阀202和第二联阀203的出口b同时通过管路连接2号马达204的b口。马达组还包括用于改变马达排量的1号马达205电磁阀y7 109和2号马达204电磁阀y8 110,1号马达205电磁阀y7 109与1号马达205连接,所述2号马达204电磁阀y8 110与2号马达204连接。
39.如图2所示,控制器101通过101、127、128、271号针脚与电源连接,控制器101通过102号针脚与所述水平定向钻机动力头推拉装置的地线连接。
40.推拉手柄102的正极与电源连接,推拉手柄102的负极与控制器101的126号管脚连接,推拉手柄102的信号线与控制器101的114号管脚连接。
41.推拉高速开关103的3号针脚与电源连接,推拉高速开关103的5号针脚与控制器
101的255号管脚连接。
42.推拉微动开关104的3号针脚与电源连接,推拉微动开关104的5号针脚与控制器101的256号管脚连接。
43.推拉主阀的第一联前推电磁阀y1 105的一端与控制器101的106号针脚连接,第一联前推电磁阀y1 105的另一端与所述水平定向钻机动力头推拉装置的地线连接。
44.推拉主阀的第一联后拉电磁阀y2 106的一端与控制器101的117号针脚连接,第一联后拉电磁阀y2 106的另一端与所述水平定向钻机动力头推拉装置的地线连接。
45.推拉主阀的第二联前推电磁阀y3 107的一端与控制器101的144号针脚连接,第二联前推电磁阀y3 107的另一端与所述水平定向钻机动力头推拉装置的地线连接。
46.推拉主阀的第二联后拉电磁阀y4 108的一端与控制器101的132号针脚连接,第二联后拉电磁阀y4 108的另一端与所述水平定向钻机动力头推拉装置的地线连接。
47.马达组的1号马达205电磁阀y7 109的一端与控制器101的142号针脚连接,1号马达205电磁阀y7 109的另一端与所述水平定向钻机动力头推拉装置的地线连接。
48.马达组的2号马达204电磁阀y8 110的一端与控制器101的130号针脚连接,2号马达204电磁阀y8 110的另一端与所述水平定向钻机动力头推拉装置的地线连接。
49.控制器101具有pwm与开关量输出切换功能,根据受控电磁阀的特性切换相应功能。如图3所示,控制器101在推拉微动开关104闭合时,控制器101会将推拉手柄102输出的线性曲线转换成非线性曲线,非线性曲线为手柄行程前半段斜率低,手柄行程后半段斜率高,能够增加推拉手柄102在前半段微动操作时的控制精度。
50.实施例二:基于实施例一的一种水平定向钻机动力头推拉微动控制方法,包括:控制器接收指令系统发送的微动、高速、前进、后退指令,向执行系统输出相应的运行指令;执行系统根据运行指令,调用液压系统实现对水平定向钻机动力头的低速前进、低速后退、微动前进、微动后退、高速前进、高速后退控制;其中,指令系统仅发送前进/后退指令的情况下,实现对水平定向钻机动力头低速控制。
51.具体的,推拉高速开关103为开关量信号,开关闭合后,控制器101接受到高电平信号;推拉微动开关104为开关量信号,开关闭合后,控制器101接受到高电平信号。在推拉微动开关104未闭合且推拉高速开关103闭合时,控制器101输出开关量24v到1号马达205电磁阀y7 109和2号马达204电磁阀y8 110,此时1号马达205和2号马达204切换为小排量。在推拉微动开关104闭合时,即使推拉高速开关103闭合,控制器101也不会输出电流到1号马达205电磁阀y7 109和2号马达204电磁阀y8 110。
52.推拉手柄102为模拟量信号,手柄前推,控制器101接受到2.5v
‑
4.5v模拟电压信号,手柄后拉,控制器101接受到0.5v
‑
2.5v模拟电压信号。
53.在推拉微动开关104未闭合时,推拉手柄102前推,控制器101输出pwm信号到第一联前推电磁阀y1 105,pwm的占空比根据手柄角度线性变化(线性曲线301),角度越大输出电流越大;推拉手柄102后拉,控制器101输出pwm信号到第一联后拉电磁阀y2 106,pwm的占空比根据手柄角度线性变化(线性曲线301),角度越大输出电流越大。
54.在推拉微动开关104闭合时,推拉手柄102前推,控制器101输出pwm信号到第二联
前推电磁阀y3 107,pwm的占空比根据手柄角度非线性变化(非线性曲线302),角度越大输出电流越大;推拉手柄102后拉,控制器101输出pwm信号到第二联后拉电磁阀y4 108,pwm的占空比根据手柄角度非线性变化(非线性曲线302),角度越大输出电流越大。
55.通过上述控制方法,在推拉微动开关104闭合时,选择水平定向钻机动力头特制的小流量电磁阀,强制关闭推拉马达小排量,同时切换手柄曲线,能够实现在推拉微动运行,提高推拉手柄102小角度操控精度。
56.具体控制方法包括:控制1:在推拉微动开关开启的情况下,推拉高速开关失效,推拉手柄前推,控制器控制第二联前推电磁阀y3得电,水平定向钻机动力头微动前进;推拉手柄后拉,控制器控制第二联后拉电磁阀y4得电,水平定向钻机动力头微动后退。
57.控制2:在推拉微动开关关闭,且推拉高速开关开启的情况下:推拉手柄前推,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组小排量正转,控制器控制推拉主阀的第一联前推电磁阀y1得电,水平定向钻机动力头高速前进;推拉手柄后拉,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组小排量反转,控制器控制推拉主阀的第一联后拉电磁阀y2得电,水平定向钻机动力头高速后退。
58.控制3:在推拉微动开关关闭,且推拉高速开关关闭的情况下:推拉手柄前推,控制器控制推拉主阀的第一联前推电磁阀y1得电,控制器通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组大排量正转,水平定向钻机动力头低速前进;推拉手柄后拉,控制器控制推拉主阀的第一联后拉电磁阀y2得电,控制器)通过控制马达组的1号马达电磁阀y7和2号马达电磁阀y8使马达组大排量反转,水平定向钻机动力头低速后退。
59.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1