一种啄木鸟敲击人工智能隧道缺陷探识系统的制作方法
1.本发明涉及隧道结构技术领域,尤其涉及一种啄木鸟敲击人工智能隧道缺陷探识系统。
背景技术:
2.在隧道结构中,围岩超欠挖、大变形、地下水渗流、初期支护劣化及衬砌浇筑缺陷等,都会造成衬砌结构与围岩贴合不紧密,使得衬砌背后产生空洞,进而引起隧道结构受力不均,使其安全性降低。为了保障隧道内的运营安全,有必要对隧道结构背后空洞进行判识,确定空洞的位置及大小,进而为其病害整治提供可靠依据。目前,常用的隧道背后空洞判识方法为人工敲击和电磁波探地雷达。该方法工作效率低,成本高,判识结果误差较大,且无法做到需判识范围的全覆盖。因此,有必要开发一种智能隧道缺陷探察识别系统,对隧道结构背后空洞的位置和大小进行智能判识,在保证判别精度的同时提高工作效率。
技术实现要素:
3.本发明为解决现有隧道背后空洞人工判识不便捷、不准确问题而提出,其目的是提供一种智能隧道缺陷探察识别系统,保证隧道结构背后空洞判识的精度和效率。
4.本发明提供了如下的技术方案:
5.一种啄木鸟敲击人工智能隧道缺陷探识系统,包括行走钢架和锤击机械臂,所述锤击机械臂滑动连接于所述行走钢架上,所述锤击机械臂相对于所述行走钢架的滑动路线与隧道截面的内壁沿线基本平行,所述锤击机械臂上设有能够摆动并对隧道内壁进行敲击的击锤,还设有声波收集器,所述声波收集器用于收集击锤的敲击声波信号、并将声波信号反馈给外部控制终端。
6.其中,所述行走钢架的外缘设有弧形滑槽,锤击机械臂上设有能够与所述弧形滑槽相匹配的滑行轮;所述滑行轮的轮轴部固定连接有支撑臂,所述支撑臂铰接连接有摆臂,所述摆臂的自由端部固定有所述击锤,所述支撑臂和摆臂之间分别铰接连接有一液压伸缩杆,通过液压伸缩杆的伸缩能够带动所述摆臂相对于支撑臂绕二者的铰接点摆动,从而带动所述击锤摆动实现敲击;所述行走钢架底部还设有行走轮,用于带动行走钢架沿隧道纵向行走。
7.进一步,所述声波收集器固定设置在摆臂上。
8.其中,所述弧形滑槽顶部两侧设有用于对滑行轮进行限位的凸壁,凸壁之间为供所述支撑臂通过的开口,弧形滑槽底面中部还设有凸条,用于进一步对滑行轮进行滑行限位。
9.其中,所述控制终端一方面用于接收并处理声波收集器反馈的声波信号,并对声波信号进行处理,形成可视化信息进行输出显示,另一方面用于分别对行走钢架和锤击机械臂的行走进行控制、以及对锤击机械臂的摆动敲击进行控制。
10.具体的,所述控制终端包括行走与撞击控制模块、声波识别模块、图像处理模块以
及显示模块;
11.所述行走与撞击控制模块分别信号连接并控制行走钢架的行走轮、锤击机械臂的滑行轮、以及锤击机械臂的液压伸缩杆;
12.所述声波识别模块用于识别声波收集器反馈的声波信号,并将识别的声波信号反馈至图像处理模块;
13.所述图像处理模块用于将识别的声波信号转换为图像数据并反馈至显示模块;
14.所述显示模块用于将接收到的图像数据形成可视化图像并显示在显示器上。
15.与现有技术相比,本发明具有的优点和积极效果是:锤击机械臂中的液压伸缩杆长度可自由伸缩,在一定范围内,可适应不同大小的隧道衬砌断面,液压伸缩杆的设置还可调控击锤的锤击方向和锤击力度,保证锤击的精度和效果;弧形滑槽呈异形,确保其与锤击机械臂的可靠连接;控制终端利用行走与锤击控制模块远程控制,能够实现自动全覆盖敲击或者预定范围的覆盖敲击;声波收集器将收集到的敲击声音传到声波识别模块,能够对锤击声音进行智能判识,进而确定缺陷(空洞等)的位置和大小;最后,图像处理系统会根据识别后声音,自动绘制缺陷平面展开图。全过程自动化作业,精度效率高。本发明很好的解决了现有隧道背后空洞人工判识不便捷、不准确问题,设计理念新颖、措施合理、效果显著,应用前景广阔。
附图说明
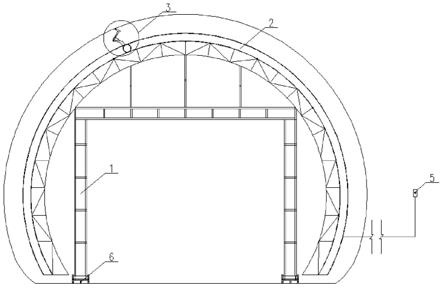
16.图1是本发明的结构立面示意图;
17.图2是本发明的锤击机械臂的结构示意图;
18.图3是本发明滑行轮与弧形滑槽配合的局部大样示意图;
19.图4是本发明控制系统的结构示意图;
20.图5是本发明敲击检测路径方案的规划示意图。
21.其中:1
‑
行走钢架;2
‑
弧形滑槽;201
‑
凸壁;202
‑
凸条;3
‑
锤击机械臂;4
‑
显示器; 5
‑
控制终端;6
‑
滑行轮;7
‑
支撑臂;8
‑
液压伸缩杆;9
‑
击锤;10
‑
声波收集器;11
‑
摆臂; 12
‑
行走与撞击控制模块;13
‑
声波识别模块;14
‑
图像处理模块;15
‑
行走轮;16
‑
显示模块。
具体实施方式
22.以下结合附图对本发明的技术方案作进一步说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
23.如图1所示,啄木鸟敲击人工智能隧道缺陷探识系统,行走钢架1和锤击机械臂3,所述锤击机械臂3滑动连接于所述行走钢架1上,所述锤击机械臂3相对于所述行走钢架1的滑动路线与隧道截面的内壁沿线基本平行,所述锤击机械臂3上设有能够摆动并对隧道内壁进行敲击的击锤9,还设有声波收集器10,所述声波收集器10用于收集击锤9的敲击声波信号、并将声波信号反馈给外部控制终端5。
24.其中,所述行走钢架1可以采用现有隧道内施工的已有钢架产品,已有钢架产品一般设有与隧道截面的内壁沿线基本平行的弧形架,可在弧形架外缘增设一弧形滑槽2,锤击
机械臂3上设有能够与所述弧形滑槽2相匹配的滑行轮6;如图2所示,所述滑行轮6的轮轴部固定连接有支撑臂7,所述支撑臂7铰接连接有摆臂11,所述摆臂11的自由端部固定有所述击锤9,所述支撑臂7和摆臂11之间分别铰接连接有一液压伸缩杆 8,通过液压伸缩杆8的伸缩能够带动所述摆臂11相对于支撑臂7绕二者的铰接点摆动,从而带动所述击锤9摆动实现敲击;所述声波收集器10可以固定设置在摆臂11上,也可以设置在其他可行的部位;所述行走钢架1底部还设有行走轮15,用于带动行走钢架 1沿隧道纵向行走。
25.其中,如图3,所述弧形滑槽2顶部两侧设有用于对滑行轮6进行限位的凸壁201,凸壁021之间为供所述支撑臂7通过的开口,弧形滑槽2底面中部还设有凸条202,用于进一步对滑行轮6进行滑行限位,防止滑行轮6在滑动过程中产生较大的偏移。
26.其中,所述控制终端5一方面用于接收并处理声波收集器10反馈的声波信号,并对声波信号进行处理,形成可视化信息进行输出显示,另一方面用于分别对行走钢架1 和锤击机械臂3的行走进行控制、以及对锤击机械臂3的摆动敲击进行控制。
27.具体的,如图4所示,所述控制终端5包括行走与撞击控制模块12、声波识别模块 13、图像处理模块14以及显示模块16;
28.所述行走与撞击控制模块12分别信号连接并控制行走钢架1的行走轮15、锤击机械臂3的滑行轮6、以及锤击机械臂3的液压伸缩杆8;
29.所述声波识别模块13用于识别声波收集器10反馈的声波信号,并将识别的声波信号反馈至图像处理模块14;
30.所述图像处理模块14用于将识别的声波信号转换为图像数据并反馈至显示模块 16;
31.所述显示模块16用于将接收到的图像数据形成可视化图像并显示在显示器4上。
32.由于声波收集器10接收到的声波信号中含有隧道缺陷信息,经控制终端5的可视化图像处理后能够将隧道缺陷信息反应到图像中并显示出来,从而可以直观的观察到隧道中的缺陷情况。
33.利用行走与撞击控制模块12可以根据需要调整击锤9的敲击检测位置。例如,如图5,沿弧形滑槽2环向,可以设置滑行轮6每移动距离d时进行一次敲击,当所在环向全部敲击检测完成后,控制行走轮15带动行走钢架1沿隧道纵向移动距离l,然后再次以距离d为间隔进行环向敲击检测,直至该环向全部敲击检测完成后进行下一环的检测,如此往复实现隧道内所需检测段的全覆盖敲击检测。也可以根据需要调整步进和行进距离d、l,以对所需的范围进行敲击检测。检测信号经控制终端5的处理,能够形成检测范围内隧道缺陷的可视化图形。
34.本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易先到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1