一种钻具姿态动态测量的智能传感系统及方法与流程
本发明涉及石油钻井领域,特别是涉及一种钻具姿态动态测量的智能传感系统及方法。
背景技术:
1、在石油钻井领域,对钻具进行姿态检测也即对钻具的工具面角、井斜和方位进行测量,可以帮助工程人员了解井下钻具的工作状态,对于钻井过程的控制至关重要。但是由于井下环境复杂,现有技术在对钻具姿态进行检测时,钻具姿态动态测量的智能传感系统中的各传感器中的一个或多个可能会出现故障,导致检测的钻具姿态的数据出现问题,甚至可能会引发工程事故。
技术实现思路
1、本发明的目的是提供一种钻具姿态动态测量的智能传感系统及方法,能够保证钻具姿态的数据的准确度,降低出现工程事故的可能。
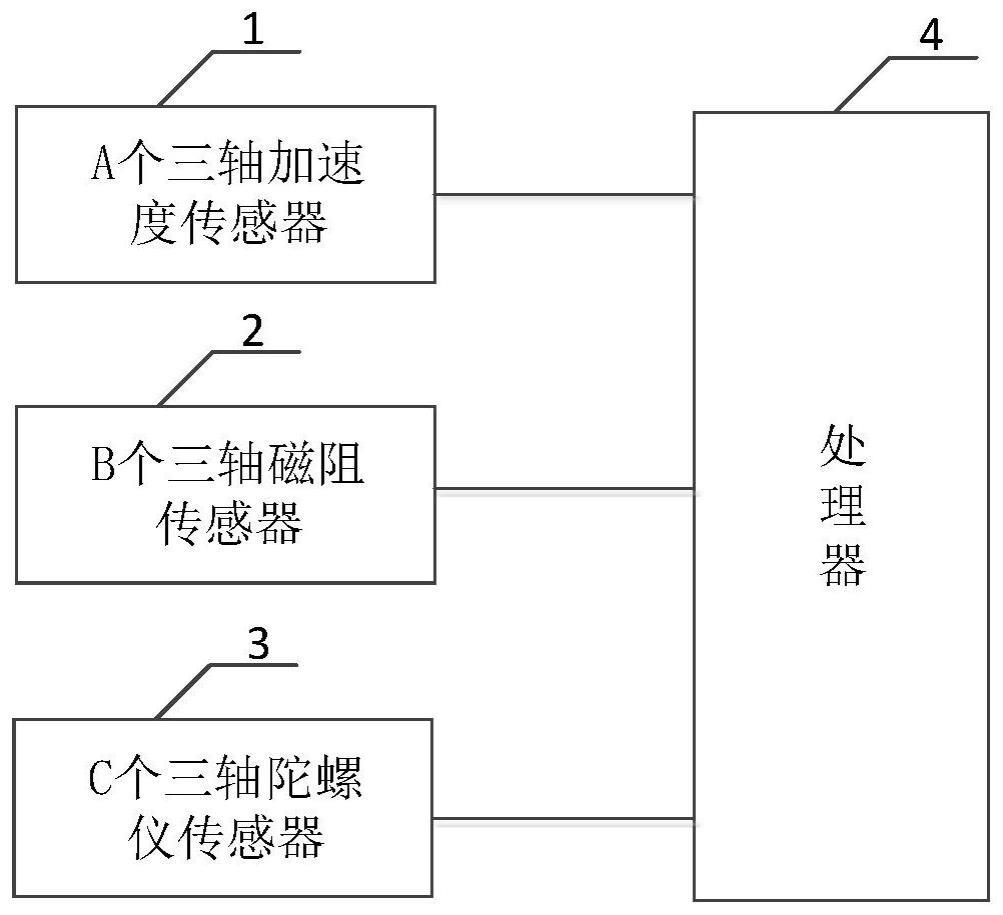
2、为解决上述技术问题,本发明提供一种钻具姿态动态测量的智能传感系统包括a个三轴加速度传感器、b个三轴磁阻传感器以及c个三轴陀螺仪传感器,还包括处理器,a为不小于2的正整数,b为正整数,c为正整数;
3、所述处理器用于获取a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器采集的数据;
4、根据所述数据判断a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中是否存在故障传感器;
5、若是,则去除所述故障传感器输出的数据。
6、优选的,在a大于2时,获取a个所述三轴加速度传感器采集的数据,包括:
7、在n1个采样时刻,分别获取a个所述三轴加速度传感器测得的k轴的加速度,所述k轴包括x轴、y轴以及z轴,n1为正整数;
8、根据所述数据判断a个所述三轴加速度传感器中是否存在故障传感器,包括:
9、从a个所述三轴加速度传感器中选出两个所述三轴加速度传感器构成三轴加速度传感器组,所述三轴加速度传感器组的数量为个;
10、对各个所述三轴加速度传感器组进行如下操作:
11、根据所述k轴的加速度判断所述三轴加速度传感器组是否异常;
12、在所有所述三轴加速度传感器组均进行完上述操作且存在三轴加速度传感器组异常后,若存在三轴加速度传感器所在的各所述三轴加速度传感器组均异常,则确定a个所述三轴加速度传感器中存在故障传感器,且所述故障传感器为所述三轴加速度传感器。
13、优选的,在a等于2时,所述钻具姿态动态测量的智能传感系统包括第一三轴加速度传感器与第二三轴加速度传感器,所述第一三轴加速度传感器与c个所述三轴陀螺仪传感器中的一个三轴陀螺仪传感器组成6轴imu;
14、获取a个所述三轴加速度传感器采集的数据,包括:
15、在n1个采样时刻,分别获取所述第一三轴加速度传感器与所述第二三轴加速度传感器测得的k轴的加速度,所述k轴包括x轴、y轴及z轴,n1为正整数;
16、根据所述数据判断a个所述三轴加速度传感器中是否存在故障传感器,包括:
17、将所述第一三轴加速度传感器与所述第二三轴加速度传感器构成一个三轴加速度传感器组;
18、根据所述k轴的加速度判断所述三轴加速度传感器组是否异常;
19、若所述三轴加速度传感器组异常,则进行如下操作:
20、在钻具静止时,分别得到所述第一三轴加速度传感器在n2个采样时刻的重力矢量和的大小的第一平均值,以及所述第二三轴加速度传感器在n2个采样时刻的重力矢量和的大小的第二平均值,n2为正整数;
21、判断所述第一平均值与1g的差值的绝对值是否大于预设阈值,以及所述第二平均值与1g的差值的绝对值是否大于所述预设阈值;
22、若所述第一平均值与1g的差值的绝对值大于所述预设阈值,则确定a个所述三轴加速度传感器中存在故障传感器,且所述故障传感器为所述第一三轴加速度传感器;
23、若所述第二平均值与1g的差值的绝对值大于所述预设阈值,则确定a个所述三轴加速度传感器中存在故障传感器,且所述故障传感器为所述第二三轴加速度传感器;
24、若所述第一平均值与1g的差值的绝对值不大于所述预设阈值且所述第二平均值与1g的差值的绝对值不大于所述预设阈值,则在n3个采样时刻获取所述6轴imu内的三轴陀螺仪传感器测得的所述k轴的陀螺仪数据,并得到所述k轴的陀螺仪数据的平均值和所述k轴的陀螺仪数据的方差,n3为正整数;
25、判断所述x轴的陀螺仪数据的平均值、所述y轴的陀螺仪数据的平均值以及所述z轴的陀螺仪数据的平均值中大于预设平均阈值的个数是否大于2,以及所述x轴的陀螺仪数据的方差、所述y轴的陀螺仪数据的方差以及所述z轴的陀螺仪数据的方差中大于预设方差阈值的个数是否大于2;
26、若均不大于2,则确定a个所述三轴加速度传感器中存在故障传感器,且所述第二三轴加速度传感器为故障传感器;
27、否则,则确定a个所述三轴加速度传感器中存在故障传感器,且所述第一三轴加速度传感器为故障传感器。
28、优选的,根据所述k轴的加速度判断所述三轴加速度传感器组是否异常,包括:
29、将同一采样时刻的所述k轴的加速度做差,得到n1个所述k轴的加速度差值;
30、确定n1个所述加速度差值的相反数;
31、确定在所述k轴的预设加速度差值正态分布上,n1个在所述k轴的加速度差值与各自对应的所述k轴的加速度差值的相反数之间的所述k轴的加速度差值概率;
32、将n1个所述k轴的加速度差值概率值相乘得到所述k轴的加速度差值概率乘积;
33、若所述k轴的加速度差值概率乘积小于所述k轴的预设加速度差值概率阈值的n1次方,则继续检测连续m组n1个采样时刻的所述k轴的加速度差值概率乘积是否均小于所述k轴的预设加速度差值概率阈值的n1次方,m为正整数;
34、若连续m组n1个采样时刻的所述k轴的加速度差值概率乘积均小于所述k轴的预设加速度差值概率阈值的n1次方,则确定所述三轴加速度传感器组异常。
35、优选的,在b与c的和大于2时,获取b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器采集的数据,包括:
36、在n4个采样时刻,根据b个所述三轴磁阻传感器测得的k轴的磁阻数据得出所述k轴的第一转速,根据c个所述三轴陀螺仪传感器测得的k轴的陀螺仪数据得出所述k轴的第二转速,所述k轴包括x轴、y轴及z轴,n4为正整数;
37、根据所述数据判断b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中是否存在故障传感器,包括:
38、从b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中选出两个传感器构成一个三轴转速传感器组,其中,所述三轴转速传感器组包括两个所述三轴磁阻传感器或包括两个所述三轴陀螺仪传感器或包括一个所述三轴磁阻传感器与一个所述三轴陀螺仪传感器,所述三轴转速传感器组的数量为个;
39、对各个所述三轴转速传感器组进行如下操作:
40、根据所述三轴转速传感器组的转速判断所述三轴转速传感器组是否异常;
41、在所有所述三轴转速传感器组均进行完上述操作且存在三轴转速传感器组异常后,若存在三轴磁阻传感器/三轴陀螺仪传感器所在的各所述三轴转速传感器组均异常,则确定b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中存在故障传感器,且所述故障传感器为所述三轴磁阻传感器/所述三轴陀螺仪传感器。
42、优选的,在b与c的和等于2时,获取b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器采集的数据,包括:
43、在n4个采样时刻,根据所述三轴磁阻传感器测得的k轴的磁阻数据得出所述k轴的第一转速,根据所述三轴陀螺仪传感器测得的k轴的陀螺仪数据得出所述k轴的第二转速,所述k轴包括x轴、y轴及z轴,n4为正整数;
44、根据所述数据判断b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中是否存在故障传感器,包括:
45、将所述三轴磁阻传感器与所述三轴陀螺仪传感器构成一个三轴转速传感器组;
46、根据所述三轴转速传感器组的转速判断所述三轴转速传感器组是否异常;
47、若所述三轴转速传感器组异常,则进行如下操作:
48、在n5个采样时刻,得到所述三轴磁阻传感器测得的磁场强度的平均值,n5为正整数;
49、判断所述磁场强度的平均值与地磁强度的差值的绝对值是否大于预设阈值;
50、若所述磁场强度的平均值与地磁强度的差值的绝对值大于所述预设阈值,则确定b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中存在故障传感器,且所述故障传感器为所述三轴磁阻传感器;
51、若所述磁场强度的平均值与地磁强度的差值的绝对值不大于所述预设阈值,则在n6个采样时刻获取所述三轴磁阻传感器测得的所述k轴的磁阻数据,并得到所述k轴的磁阻数据的平均值和所述k轴的磁阻数据的方差,n6为正整数;
52、判断所述x轴的磁阻数据的平均值、所述y轴的磁阻数据的平均值以及所述z轴的磁阻数据的平均值中大于第一预设平均阈值的个数是否大于2,以及所述x轴的磁阻数据的方差、所述y轴的磁阻数据的方差以及所述z轴的磁阻数据的方差中大于第一预设方差阈值的个数是否大于2;
53、若均不大于2,则进入判断所述三轴陀螺仪是否异常的步骤;
54、否则,则确定b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中存在故障传感器,且所述故障传感器为所述三轴磁阻传感器;
55、判断所述三轴陀螺仪是否异常,包括:
56、在n7个采样时刻,获取所述三轴陀螺仪传感器测得的所述k轴的陀螺仪数据,并得到所述k轴的陀螺仪数据的平均值和所述k轴的陀螺仪数据的方差,n7为正整数;
57、判断所述x轴的陀螺仪数据的平均值、所述y轴的陀螺仪数据的平均值以及所述z轴的陀螺仪数据的平均值中大于第二预设平均阈值的个数是否大于2,以及所述x轴的陀螺仪数据的方差、所述y轴的陀螺仪数据的方差以及所述z轴的陀螺仪数据的方差中大于第二预设方差阈值的个数是否大于2;
58、若均不大于2,则确定b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中不存在故障传感器;
59、否则,则确定b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中存在故障传感器,且所述故障传感器为所述三轴陀螺仪传感器。
60、优选的,根据所述三轴转速传感器组的转速判断所述三轴转速传感器组是否异常,包括:
61、将所述三轴转速传感器组在同一采样时刻的转速做差,得出n4个所述k轴的转速差值;
62、确定n4个所述转速差值的相反数;
63、确定在所述k轴的预设转速差值正态分布上,n4个在所述k轴的转速差值与各自对应的所述转速差值的相反数之间的所述k轴的转速差值概率;
64、将n4个所述k轴的转速差值概率相乘得到所述k轴的转速差值概率乘积;
65、若所述k轴的转速差值概率乘积小于所述k轴的预设转速差值概率阈值的n4次方,则继续检测连续m组n4个采样时刻的所述k轴的转速差值概率乘积是否均小于所述k轴的预设加速度差值概率阈值的n4次方,m为正整数;
66、若连续m组n4个采样时刻的所述k轴的转速差值概率乘积均小于所述k轴的预设转速差值概率阈值的n4次方,则确定所述三轴转速传感器组异常。
67、优选的,
68、所述处理器还用于根据a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中无故障传感器输出的数据,确定钻具的工具面角、井斜和方位。
69、本发明还提供了一种钻具姿态动态测量的方法,应用于钻具姿态动态测量的智能传感系统中的处理器,所述钻具姿态动态测量的智能传感系统还包括a个三轴加速度传感器、b个三轴磁阻传感器以及c个三轴陀螺仪传感器,a为不小于2的正整数,b为正整数,c为正整数;所述钻具姿态测量的方法包括:
70、获取a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器采集的数据;
71、根据所述数据判断a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中是否存在故障传感器;
72、若是,则去除所述故障传感器输出的数据。
73、优选的,去除所述故障传感器输出的数据之后,还包括:
74、根据a个所述三轴加速度传感器、b个所述三轴磁阻传感器以及c个所述三轴陀螺仪传感器中无故障传感器输出的数据,确定钻具的工具面角、井斜和方位。
75、本发明提供了一种钻具姿态动态测量的智能传感系统及方法,能够检测钻具姿态动态测量的智能传感系统中的三轴加速度传感器、三轴磁阻传感器以及三轴陀螺仪传感器中是否存在故障传感器,在存在故障传感器时,能够将故障传感器输出的数据去除,避免对钻具姿态的测量造成影响,保证钻具姿态的数据的准确度,降低出现工程事故的可能。
- 还没有人留言评论。精彩留言会获得点赞!