臂式掘进机工作机构及其截割状态描述装置和描述方法
1.本发明属于采掘装备技术领域,尤其涉及臂式掘进机工作机构及其截割状态描述装置和描述方法。
背景技术:
2.悬臂式掘进机是煤矿长臂工作面开采巷道掘进的主要装备,分为纵轴式和横轴式两种类型。与现用于山体和地下交通隧道开拓用盾构式掘进机有所不同,盾构式掘进机采用多组盘形刀具切削岩土隧道,具有切削较硬的岩石的能力,如欧洲用于穿越阿尔卑斯山的大型隧道盾构机;而悬臂式掘进机采用旋转滚筒上固定安装的诸多截齿截割煤或半煤岩,适用于煤矿井下煤巷或软岩巷道掘进。由于煤矿井下复杂多变的地质条件是大自然形成的,在臂式掘进机进行煤矿煤巷或软岩巷道掘进过程中常会遇到较硬的煤岩,此时,臂式掘进机会遭遇截割硬岩的冲击载荷,截齿的强度及耐磨性、截割部的抗冲击振动性能变得非常重要,因而成为悬臂式掘进机研究开发的热点及技术关键。
3.目前研究煤矿井下巷道盾构机也在进行中,但由于煤矿井下巷道比铁路隧道狭小曲折,不适于大型装备,而体积质量小的盾构机难以承受切割硬岩的冲击振动。臂式掘进机在今后相当长时期仍是煤矿井下半煤岩巷道掘进不可替代的主力装备,而对于坚硬的岩巷掘进,爆破、装岩是唯一的选择。针对悬臂式掘进机研究开发的热点及技术关键问题,开展悬臂式掘进机工作机构自适应控制的截割状态描述与评价的研究。
4.随着国内建设事业的高速度增长,我国掘进机械也迎来了飞速的发展。现有的掘进机没有涉及截割头横向摆动角度指示功能和对摆动速度控制的功能,在掘进过程中可能出现超挖或欠挖现象,导致矿井不够平整,挖掘质量不够好,影响掘进进度;其中对横摆速度的调节多是由人工控制调节,井下恶劣的工作环境会对掘进操作人员的身体健康和安全带来很大的威胁。因此,一种臂式掘进机工作机构及其截割状态自适应描述方法显得尤为重要。
技术实现要素:
5.本发明提供一种臂式掘进机工作机构及其截割状态描述装置和描述方法,能够针对各种截割状态,包括全截割还是部分截割、顺逆截割自由面和截割层理等状态进行控制,保证矿井煤岩的掘进效率和质量。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种臂式掘进机工作机构,包括截割头、减速器、电机,所述截割头与减速器连接,所述减速器与电机连接,所述电机在复合动力装置内,所述复合动力装置的一端设有悬挂臂,所述悬挂臂配置有驱动其水平摆动的水平摆动液压缸,所述悬挂臂与减速器之间设有驱动截割头上下摆动的上下摆动液压缸。
8.作为上述技术方案的进一步描述:所述水平摆动液压缸铰接设置在支撑架上。
9.作为上述技术方案的进一步描述:所述上下摆动液压缸铰接在悬挂臂上。
10.作为上述技术方案的进一步描述:所述上下摆动液压缸的输出端与减速器铰接。
11.一种悬臂式掘进机工作机构的截割状态描述方法,包括智能控制决策模块、用于检测轨迹方案与轨迹位置的坐标参数模块、用于检测全截割还是部分截割和顺逆截割自由面等的截割状态模块、用于感知截割位置与截割运动参数(如截割转速、压力等)的截割状态参数模块、用于检测刀具三向载荷和截割能耗及截割状态参数的性能参数预测建模模块、用于检测煤岩截割阻抗和坚固性系数的煤岩性质分布描述模块,所述坐标参数模块、截割状态模块、截割状态参数模块、性能参数预测建模模块和煤岩性质分布描述模块最后与智能控制决策模块连接。
12.作为上述技术方案的进一步描述:所述截割头安装在截割头轴上,截割头轴上装有截割头转速传感器,所述截割头转速传感器与坐标参数模块连接。
13.作为上述技术方案的进一步描述:所述智能控制决策模块分别与截割电机变频模块和截割进给机构模块连接,进而调节电机电流、功率和截割速度参数。
14.截割状态描述装置的截割状态描述方法,包括以下步骤:
15.所述坐标参数模块根据人工操作轨迹建模确定截割头的初始位置及其转速;
16.所述截割状态参数模块检测截割头的位置及其转速和压力;
17.所述性能参数预测建模模块建立三向载荷和截割能耗及截割状态参数的预测模型,实现参数的预测;
18.所述煤岩性质分布描述模块根据断面图像边缘识别和预测模型,进而实现判断截割位置、煤岩截割阻抗和坚固性系数大小的作用。
19.本发明具有如下有益效果:
20.1、本发明提供的一种臂式掘进机工作机构及其截割状态自适应描述方法,可用判断截割状态,断面煤岩性质预测及其分布,截割效率提高50%以上。
21.2、本发明提供的一种臂式掘进机工作机构及其截割状态自适应描述方法,连接可靠,便于维护,截割头可绕自身回转轴自由旋转,截割刀具寿命提高30%以上。
22.3、本发明提供的一种臂式掘进机工作机构及其截割状态自适应描述方法,可实现截割轨迹的自适应调节。
附图说明
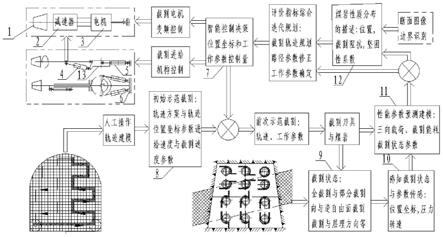
23.图1为本发明提供的臂式掘进机工作机构及其截割状态描述装置示意图;
24.图2为本发明提供的臂式掘进机工作机构的简图。
25.图3为本发明提供的臂式掘进机工作机构的结构图。
26.附图说明:
27.1-截割头;2-减速器;3-电机;4-上下摆动液压缸;5-水平摆动液压缸;6-支撑架;7-智能控制决策模块;8-位置坐标参数模块;9-截割状态模块;10-截割状态参数模块;11-性能参数预测建模模块;12-煤岩性质分布描述模块;13-悬挂臂。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例1
30.参照图2和图3,本发明提供的一种实施例:一种臂式掘进机工作机构,包括截割头1、减速器2、电机3,所述截割头1与减速器2连接,所述减速器2与电机3连接,所述电机3在复合动力装置内,所述复合动力装置的一端设有悬挂臂13,所述悬挂臂13配置有驱动其水平摆动的水平摆动液压缸5,所述悬挂臂13与减速器2之间设有驱动截割头1上下摆动的上下摆动液压缸4。
31.在本实施例中,所述水平摆动液压5缸铰接设置在支撑架6上。所述上下摆动液压缸4铰接在悬挂臂13上。
32.在本实施例中,所述上下摆动液压缸4的输出端与减速器2铰接。
33.实施例2
34.结合实施例1,参照图1,一种悬臂式掘进机工作机构的截割状态描述装置,包括智能控制决策模块7、用于检测轨迹方案与轨迹位置的坐标参数模块8、用于检测全截割还是部分截割和顺逆截割自由面等的截割状态模块9、用于感知截割位置与截割运动参数(如截割转速、压力等)的截割状态参数模块10、用于检测刀具三向载荷和截割能耗及截割状态参数的性能参数预测建模模块11、用于检测煤岩截割阻抗和坚固性系数的煤岩性质分布描述模块12;所述坐标参数模块8、截割状态模块9、截割状态参数模块10、性能参数预测建模模块11和煤岩性质分布描述模块12最后与智能控制决策模块7连接。
35.在本实施例中,所述坐标参数模块8根据人工操作轨迹建模确定截割头的初始位置及其转速,所述截割状态参数模块10用于检测截割头的位置及其转速和压力等。
36.在本实施例中,所述截割头1安装在截割头轴上,截割头1轴上装有截割头转速传感器,所述截割头转速传感器与坐标参数模块8连接。
37.在本实施例中,所述性能参数预测建模模块11用于建立三向载荷和截割能耗及截割状态参数的预测模型,实现参数的预测。
38.在本实施例中,所述煤岩性质分布描述模块12根据断面图像边缘识别和预测模型,进而实现判断截割位置、煤岩截割阻抗和坚固性系数大小的作用。
39.在本实施例中,所述智能控制决策模块7分别与截割电机变频模块和截割进给机构模块连接,进而调节电机电流、功率和截割速度参数。
40.截割状态描述装置的截割状态描述方法,包括以下步骤:
41.所述坐标参数模块8根据人工操作轨迹建模确定截割头的初始位置及其转速;
42.所述截割状态参数模块10检测截割头的位置及其转速和压力。
43.所述性能参数预测建模模块11建立三向载荷和截割能耗及截割状态参数的预测模型,实现参数的预测;
44.所述煤岩性质分布描述模块12根据断面图像边缘识别和预测模型,进而实现判断截割位置、煤岩截割阻抗和坚固性系数大小的作用。
45.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1