基于喷浆作业车的喷浆方法与流程
1.本发明涉及井下锚喷支护技术领域,具体地,涉及一种基于喷浆作业车的喷浆方法。
背景技术:
2.井下巷道掘进过程中,为了保证掘进的安全性,需要及时的对已掘进的巷道进行锚护,相关技术中,掘进巷道的锚护多为锚喷支护,即通过锚杆和喷浆的方式实现对巷道围岩的支护,但是相关技术中喷浆支护多由井下工人操作完成,工作劳动强度大,支护效率低。
技术实现要素:
3.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本发明实施例提出一种基于喷浆作业车的喷浆方法,该基于喷浆作业车的喷浆方法能够实现机械化喷涂,降低了劳动强度,喷涂效率高且有序,保证了喷涂的品质。
5.本发明实施例喷浆作业车包括车体和喷浆装置,所述喷浆装置包括喷浆臂组和喷浆组件,所述喷浆组件设于所述喷浆臂组的自由端,所述喷浆组件包括第一传感器、喷浆基架、喷浆滑架、第二传感器、第一喷浆驱动、第二喷浆驱动和喷头,所述第一传感器设于所述喷浆臂组的自由端或所述喷浆基架并适于监测是否接顶,所述喷浆基架可转动地连接在所述喷浆臂组地自由端,所述喷浆滑架导向滑移装配在所述喷浆基架上,所述第一喷浆驱动连接在所述喷浆基架和所述喷浆滑架之间并适于驱动所述喷浆滑架和所述喷浆基架的相对滑移,所述喷头设在所述喷浆滑架上,所述第二喷浆驱动设在所述喷头和所述喷浆滑架之间并适于驱动所述喷头移动,所述喷头适于喷射浆料;
6.基于喷浆作业车的喷浆方法包括以下步骤:
7.s1:操控喷浆臂组向前和向上伸展,并直至第一传感器感应到接顶,然后操控喷浆基架向巷道的一侧转动并直至喷浆基架的延伸方向与巷道宽度方向一致;
8.s2:通过第二喷浆驱动驱使喷头移动进行第一次喷涂作业;
9.s3:待第一次喷涂作业完成后,通过第一喷浆驱动驱使喷浆滑架滑移,并直至第二传感器感应到侧帮,然后利用第二喷浆驱动驱动喷头移动并进行第二次喷涂作业;
10.s4:待第二喷涂作业完成后,复位喷浆滑架,然后操控喷浆基架向巷道的另一侧转动;
11.s5:重复步骤s2和步骤s3并完成巷道另一侧的喷涂。
12.本发明实施例的基于喷浆作业车的喷浆方法能够实现机械化喷涂,降低了劳动强度,喷涂效率高且有序,保证了喷涂的品质。
13.在一些实施例中,所述喷浆方法还包括以下步骤:
14.s6:下降所述喷浆臂组,然后操控喷浆臂组向后摆动以后移喷浆组件;
15.s7:重复步骤s1至步骤s5,并再次完成喷涂作业;
16.s8:重复步骤s6和步骤s7,直至完成巷道长度方向1米至1.3米的顶板喷浆;
17.s9:将喷浆作业车移动至下一位置,然后重复步骤s6至步骤s8,直至完成巷道的喷涂。
18.在一些实施例中,所述喷浆臂组包括第一喷浆臂、第二喷浆臂、第三喷浆驱动、喷浆座、第四喷浆驱动和第五喷浆驱动,所述第二喷浆臂通过所述第三喷浆驱动可转动地与所述第一喷浆臂的自由端相连,所述喷浆座通过所述第四喷浆驱动可转动地连接在所述第二喷浆臂的自由端,所述第四喷浆驱动适于将所述喷浆组件调至水平,所述第五喷浆驱动连接在所述喷浆组件和所述喷浆座之间,所述第五喷浆驱动适于驱动所述喷浆组件水平摆动。
19.在一些实施例中,所述第一喷浆臂和所述第二喷浆臂可伸缩,所述第一喷浆臂适于通过伸缩调整所述喷浆组件的高度,所述第二喷浆臂适于通过伸缩和摆动调整所述喷浆组件的空间位置,所述第一喷浆臂和所述第二喷浆臂均包括喷浆外套筒、喷浆内套筒和喷浆驱动器,所述喷浆内套筒导向配合在喷浆外套筒内,所述喷浆驱动器设在所述喷浆外套筒内,所述喷浆驱动器的一端与所述喷浆内套筒相连,所述喷浆驱动器的另一端与所述喷浆外套筒相连,所述喷浆驱动器适于驱动所述喷浆外套筒和所述喷浆内套筒相对移动。
20.在一些实施例中,所述喷浆外套筒和所述喷浆内套筒的横截面均为圆形,所述喷浆内套筒的外周侧设有键槽,所述键槽沿着所述喷浆内套筒的延伸方向延伸,所述喷浆外套筒上设有键,所述键配合在所述键槽内以止转所述喷浆外套筒和所述喷浆内套筒,所述喷浆驱动器的一端与所述喷浆内套筒铰接,所述喷浆驱动器的另一端与所述喷浆外套筒铰接,所述第三喷浆驱动设在所述喷浆外套筒的外周侧。
21.在一些实施例中,所述第一喷浆臂和所述第二喷浆臂均包括位移传感器、铜套和刮泥环,所述位移传感器连接在所述喷浆驱动器和所述喷浆内套筒之间,所述位移传感器适于监测所述喷浆驱动器的伸缩量,所述铜套和所述刮泥环设在所述喷浆外套筒供所述喷浆内套筒插入的端口处,所述铜套位于所述喷浆外套筒和所述刮泥环之间。
22.在一些实施例中,基于喷浆作业车的喷浆方法具有工作形态和闲置形态,在所述工作形态,所述第一喷浆臂和所述第二喷浆臂伸展,所述喷浆基架转动至所述喷浆臂组一侧并与所述第二喷浆臂垂直,在所述闲置形态,所述第一喷浆臂和所述第二喷浆臂收缩,所述喷浆基架转动至与所述第二喷浆臂平行的位置,且所述喷浆基架和所述第二喷浆臂重合。
23.在一些实施例中,所述喷浆组件包括喷浆导向杆和喷浆导向座,所述喷浆导向杆和所述喷浆导向座的其中一者设在所述喷浆基架上、另一者设在所述喷浆滑架上,所述喷浆导向杆与所述喷浆导向座导向配合以使所述喷浆滑架和所述喷浆基架可相对滑移,所述第一喷浆驱动的伸缩方向和所述喷浆导向杆的延伸方向一致。
24.在一些实施例中,所述第二喷浆驱动包括喷浆链条和喷浆马达,所述喷浆马达的驱动端通过齿轮与所述喷浆链条啮合传动,所述喷头设在所述喷浆链条上,所述喷浆马达适于通过驱动所述喷浆链条转动以驱动所述喷头移动。
25.在一些实施例中,包括第一储料罐、第二储料罐和清洗剂储罐,所述第一储料罐、所述第二储料罐、所述清洗剂储罐均与所述喷头连通,所述第一储料罐适于存储第一料,所述第二储料罐适于存储第二料,所述第一料和所述第二料适于在所述喷头处喷出并速凝混
合,所述清洗剂储罐适于存储清洗剂,所述清洗剂适于清洗所述喷头。
附图说明
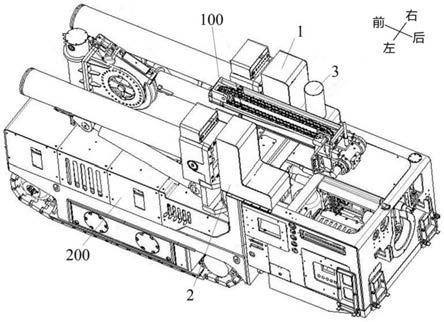
26.图1是本发明实施例的喷浆作业车的整体结构示意图。
27.图2是图1中喷浆作业车的喷浆装置的工作形态示意图一。
28.图3是图1中喷浆作业车的喷浆装置的闲置形态示意图。
29.图4是图1中喷浆作业车的喷浆装置的工作形态示意图二。
30.图5是图2中第一喷浆臂的结构示意图。
31.图6是图2中第三喷浆驱动的结构示意图。
32.图7是图2中第二喷浆臂的结构示意图。
33.图8是图2中喷浆组件的结构示意图。
34.图9是图2中喷浆装置的侧视示意图。
35.图10是图2中喷浆装置的俯视示意图。
36.图11是图2中喷浆装置的喷涂示意图。
37.附图标记:
38.喷浆装置100;
39.第一储料罐1;
40.第二储料罐2;
41.清洗剂储罐3;
42.喷浆臂组4;第一喷浆臂41;第一喷浆外套筒411;第一喷浆内套筒412;第一喷浆驱动器413;第一位移传感器414;第一键槽415;第一键416;第一铜套417;第二喷浆臂42;第二喷浆外套筒421;第二喷浆内套筒422;第二刮泥环423;第二铜套424;第三喷浆驱动43;安装板431;驱动马达432;蜗杆433;涡轮434;角度编码器435;第四喷浆驱动44;喷浆座45;第五喷浆驱动46;
43.喷浆组件5;喷浆基架51;喷浆滑架52;第一喷浆驱动53;喷浆导向杆54;第二喷浆驱动55;喷浆链条551;喷浆马达552;喷头56;第一传感器57;
44.车体200。
具体实施方式
45.下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
46.如图1所示,本发明实施例的喷浆作业车包括车体200和喷浆装置100,喷浆装置安装在车体200上,车体200可以自行移动并将喷浆装置100移动至需要喷涂的位置处。可以理解的是,车体可以为履带式车体,也可以是胶轮式车体等其他车体。
47.如图2至图11所示,喷浆装置包括喷浆臂组4和喷浆组件5。喷浆臂组4即为机械臂,喷浆臂组4可以通过螺栓和螺母固定在车体200上,喷浆臂组4主要用于调整喷浆组件5的空间位置。
48.喷浆组件5设于喷浆臂组4的自由端,喷浆组件5包括第一传感器57、喷浆基架51、喷浆滑架52、第二传感器、第一喷浆驱动53、第二喷浆驱动55和喷头56,第一传感器57设于
喷浆臂组4的自由端或喷浆基架51并适于监测是否接顶,喷浆基架51可转动地连接在喷浆臂组4地自由端,喷浆滑架52导向滑移装配在喷浆基架51上,第一喷浆驱动53连接在喷浆基架51和喷浆滑架52之间并适于驱动喷浆滑架52和喷浆基架51的相对滑移,喷头56设在喷浆滑架52上,第二喷浆驱动55设在喷头56和喷浆滑架52之间并适于驱动喷头56移动,喷头56适于喷射浆料。
49.具体地,如图2所示,喷浆组件5则可以安装在喷浆臂组4的驱动端,通过喷浆臂组4可以实现对喷浆组件5空间方位的调整,从而方便了将喷浆组件5调整到位。
50.喷浆基座可以为平板状,喷浆基座的一端可以与喷浆臂组4的驱动端可转动地相连,喷浆基座和喷浆臂组4之间的转动轴可以沿着上下方向延伸,由此,喷浆组件5可以在水平面内摆动,从而使得喷浆组件5始终可以与巷道的顶板大体保持平行,方便了喷涂作业,也增强了作业方式的灵活性,使得喷涂的方式可以通过转动喷浆基座的方式进行调整。
51.喷浆滑架52可以通过导轨结构导向滑移装配在喷浆基座上,喷浆滑架52的滑移方向可以与喷浆基座的延伸方向一致,通过设置喷浆滑架52可以增加喷涂作业范围,从而增强喷涂作业的灵活性和对不同尺寸巷道的适应性。
52.第一喷浆驱动53可以为液压伸缩油缸,第一喷浆驱动53可以设在喷浆基架51和喷浆滑架52之间,第一喷浆驱动53的一端可以与喷浆基架51铰接,第一喷浆驱动53的另一端可以与喷浆滑架52铰接,通过第一喷浆驱动53的伸缩可以实现喷浆滑架52和喷浆基架51的相对位置调整。
53.可选地,喷浆滑架52的横截面可以为门字形,第一喷浆驱动53可以装配在喷浆滑架52所形成的凹槽内。
54.喷头56可以通过导轨结构导向滑移装配在喷浆滑架52上,第二喷浆驱动55也可以为液压伸缩油缸,第二喷浆驱动55的一端可以与喷浆滑架52铰接,第二喷浆驱动55的另一端可以与喷头56铰接,通过第二喷浆驱动55的伸缩可以实现喷头56的滑移驱动。由此,在喷涂作业过程中,喷头56可以向巷道的顶板或侧帮喷射浆料,第二喷浆驱动55则可以驱动喷头56缓慢移动,从而实现了喷头56的范围作业。
55.需要说明的是,喷头56可以通过软管与供浆装置连通,供浆装置可以向喷头56输送浆料。
56.需要说明的是,锚护喷浆机器人还可以设有控制装置,控制装置可以为plc控制系统,当然也可以为其他处理器或控制器。喷浆装置100可以与控制装置电性相连,通过控制装置可以实现对喷浆装置100的统筹控制,进而可以实现喷浆支护的自动化。
57.第一传感器57和第二传感器均可以为压力传感器,第一传感器57可以安装在喷浆基架51上,也可以安装在喷浆臂组4的自由端。当喷浆臂组4伸展后,第一传感器57会首先与巷道的顶板接触,从而可以判断喷浆臂组4伸展到位,此时可以停止喷浆臂组4的伸展。第二传感器可以设在喷浆滑架52的端部,当需要对临近巷道侧帮的顶板进行喷涂时,第二传感器可以首先与巷道侧帮接触,从而可以判断喷浆滑架52移动到位。第一传感器57和第二传感器的设置实现了对喷浆组件5状态调整的监测,有利于实现喷涂的自动化并起到了保护效果。
58.基于喷浆作业车的喷浆方法包括以下步骤:
59.s1:操控喷浆臂组4向前和向上伸展,并直至第一传感器57感应到接顶,然后操控
喷浆基架51向巷道的一侧转动并直至喷浆基架51的延伸方向与巷道宽度方向一致。具体地,喷浆臂组4可以斜向前上方伸展,待第一传感器57与巷道顶板接触后,可以停止伸展,然后可以驱动喷浆基架51向巷道的左侧摆动,并直至喷浆基架51大体沿着左右方向延伸。
60.s2:通过第二喷浆驱动55驱使喷头56移动进行第一次喷涂作业。具体地,可以启动喷头56对巷道顶板进行喷涂,通过第二喷浆驱动55可以驱动喷头56沿着左右方向移动,从而实现巷道左侧部分顶板的喷涂。
61.s3:待第一次喷涂作业完成后,通过第一喷浆驱动53驱使喷浆滑架52滑移,并直至第二传感器感应到侧帮,然后利用第二喷浆驱动55驱动喷头56移动并进行第二次喷涂作业。由此,可以实现对巷道左侧剩余部分顶板的喷涂。
62.s4:待第二喷涂作业完成后,复位喷浆滑架52,然后操控喷浆基架52向巷道的另一侧转动。由此,可以实现巷道右侧的喷涂,复位喷浆滑架52则可以避免与巷道侧帮碰触的情况。
63.s5:重复步骤s2和步骤s3并完成巷道另一侧的喷涂。
64.本发明实施例的基于喷浆作业车的喷浆方法能够对巷道围岩进行喷涂,从而实现了喷浆支护的机械化的自动化,另外,由于喷涂作业规律有序,使得喷浆作业车可以预设的程度下完成喷涂,简化了喷涂工艺和步骤,避免了喷涂过程杂乱无章的情况,规范了喷涂作业,提高了喷涂效率和喷涂品质,避免了遗漏的情况。
65.在一些实施例中,基于喷浆作业车的喷浆方法还包括以下步骤:
66.s6:下降所述喷浆臂组4,然后操控喷浆臂组4向后摆动以后移喷浆组件5。具体地,可以首先将喷浆臂组4下降300mm以使喷浆组件5脱离接顶状态,然后驱动喷浆臂组4向车体200的后侧摆动。
67.s7:重复步骤s1至步骤s5,并再次完成喷涂作业。操作过程中可以借助第一传感器57将喷浆组件5再次移动至接顶的位置处。
68.s8:重复步骤s6和步骤s7,直至完成巷道长度方向1米至1.3米的顶板喷浆;
69.s9:将喷浆作业车移动至下一位置,然后重复步骤s6至步骤s8,直至完成巷道的喷涂。
70.由此,规范了整个巷道的喷涂作业,使得整个巷道的喷涂规则有序,提高了喷涂效率和喷涂品质,避免了遗漏的情况。
71.在一些实施例中,喷浆臂组4包括第一喷浆臂41、第二喷浆臂42、第三喷浆驱动43、喷浆座45、第四喷浆驱动44和第五喷浆驱动46,第二喷浆臂42通过第三喷浆驱动43可转动地与第一喷浆臂41的自由端相连,喷浆座45通过第四喷浆驱动44可转动地连接在第二喷浆臂42的自由端,第四喷浆驱动44适于将喷浆组件5调至水平,第五喷浆驱动46连接在喷浆组件5和喷浆座45之间,第五喷浆驱动46适于驱动喷浆组件5水平摆动。
72.具体地,如图2至图4所示,第一喷浆臂41可以沿着上下方向布置,第一喷浆臂41的底端与车体200安装固定,第二喷浆臂42的一端可以与第一喷浆臂41的顶板可转动地相连,第三喷浆驱动43可以为回转驱动,第三喷浆驱动43可以设在第一喷浆臂41和第二喷浆臂42之间,通过第三喷浆驱动43可以实现第二喷浆臂42在前后方向的摆动驱动,喷浆组件5可以设在第二喷浆臂42的另一端。由此,可以实现喷浆组件5在车体200前后位置的调整,一方面增加了喷浆作业范围,另一方面可以调节锚护喷浆机器人的重心,从而有利于提升稳定性。
73.第四喷浆驱动44可以固定在第二喷浆臂42背离第一喷浆臂41的端部,第四喷浆驱动44可以为回转驱动,喷浆座45可以为l型,喷浆座45可以固定在第四喷浆驱动44的外周侧,第四喷浆驱动44的驱动轴可以沿着左右方向延伸,由此,可以实现喷浆座45的上下摆动驱动。
74.需要说明的是,当第二喷浆臂42摆动调整后,喷浆组件5的方位也会发生变化,此时,喷头56不能与巷道的顶板正对,第四喷浆驱动44的设置则可以实现对喷头56喷射方向的校正。
75.第五喷浆驱动46可以电机,第五喷浆驱动46的缸壁可以与喷浆座45连接固定,喷浆基架51则可以与第五喷浆驱动46的驱动轴连接固定,第五喷浆驱动46的驱动轴可以沿着上下方向延伸,由此,可以实现喷浆基架51在水平方向的位置调整。
76.优选地,如图8所示,第一传感器57固定在喷浆座45上。
77.在一些实施例中,第一喷浆臂41和第二喷浆臂42可伸缩,第一喷浆臂41适于通过伸缩调整喷浆组件5的高度,第二喷浆臂42适于通过伸缩和摆动调整喷浆组件5的空间位置,第一喷浆臂41和第二喷浆臂42均包括喷浆外套筒、喷浆内套筒和喷浆驱动器,喷浆内套筒导向配合在喷浆外套筒内,喷浆驱动器设在喷浆外套筒内,喷浆驱动器的一端与喷浆内套筒相连,喷浆驱动器的另一端与喷浆外套筒相连,喷浆驱动器适于驱动喷浆外套筒和喷浆内套筒相对移动。
78.具体地,如图4所示,第一喷浆臂41和第二喷浆臂42的长度均可以伸缩调整,例如,第一喷浆臂41和第二喷浆臂42均可以为液压伸缩油缸。使用过程中,通过第一喷浆臂41和第二喷浆臂42的伸缩调整可以满足不同尺寸巷道的使用。
79.第一喷浆臂41和第二喷浆臂42均可以包括喷浆外套筒、喷浆内套筒和喷浆驱动器,喷浆内套筒配合在喷浆外套筒内并相对喷浆外套筒可滑移,喷浆驱动器可以为液压伸缩油缸,喷浆驱动器设在喷浆外套筒内,喷浆驱动器的一端可以与喷浆外套筒铰接,喷浆驱动器的另一端可以与喷浆内套筒铰接,通过喷浆驱动器的伸缩实现喷浆内套筒和喷浆外套筒的相对移动,进而可以实现第一喷浆臂41和第二喷浆臂42的伸缩调整。
80.使用过程中,喷浆内套筒和喷浆外套筒主要用于承受挠曲和剪切作用力,喷浆驱动器则受到外力的影响较小,从而起到了保护喷浆驱动器的作用,保证了第一喷浆臂41和第二喷浆臂42使用的稳定性和结构强度。
81.在一些实施例中,喷浆外套筒和喷浆内套筒的横截面均为圆形,喷浆内套筒的外周侧设有键槽,键槽沿着喷浆内套筒的延伸方向延伸,喷浆外套筒上设有键,键配合在键槽内以止转喷浆外套筒和喷浆内套筒,喷浆驱动器的一端与喷浆内套筒铰接,喷浆驱动器的另一端与喷浆外套筒铰接,第三喷浆驱动43设在喷浆外套筒的外周侧。
82.具体地,如图5和图6所示,第一喷浆臂41和第二喷浆臂42的横截面均为圆形。由此,在相同耗材的情况,第一喷浆臂41和第二喷浆臂42具有更好的结构强度。此时,为了避免喷浆内套筒和喷浆外套筒的相对转动,喷浆内套筒的外周侧可以设有键槽,键槽沿着喷浆内套筒的延伸方向延伸,喷浆外套筒上可以安装有键,键的一部分可以配合在键槽内,通过键和键槽的挡止可以实现喷浆内套筒和喷浆外套筒的止转配合。
83.例如,如图5所示,第一喷浆臂41包括第一喷浆外套筒411、第一喷浆内套筒412和第一喷浆驱动53器413,第一喷浆内套筒412的外周侧可以设有两个第一键槽415,两个第一
键槽415相对布置且均沿着第一喷浆内套筒412的轴向延伸,第一喷浆外套筒411上可以设有两个第一键416,两个第一键416相对布置,且两个第一键416分别配合在两个第一键槽415内,当第一喷浆外套筒411相对第一喷浆内套筒412滑移时,两个第一键416可以分别在对应地第一键槽415内滑移,从而起到止转效果。
84.在一些实施例中,第一喷浆臂41和第二喷浆臂42均包括位移传感器、铜套和刮泥环,位移传感器连接在喷浆驱动器和喷浆内套筒之间,位移传感器适于监测喷浆驱动器的伸缩量,铜套和刮泥环设在喷浆外套筒供喷浆内套筒插入的端口处,铜套位于喷浆外套筒和刮泥环之间。
85.具体地,如图5所示,第一喷浆臂41还包括第一位移传感器414、第一铜套417和第一刮泥环,第一位移传感器414可以连接在第一喷浆驱动53器413的端部和对应的枢转轴之间,第一位移传感器414能够实时监测第一喷浆驱动53器413的伸缩量,从而方便实时掌控第一喷浆臂41的伸展情况,有利于实现自动化调控。
86.第一铜套417和第一刮泥环可以均设在第一喷浆外套筒411的端口处,第一铜套417起到自润滑和减小摩擦的效果,第一刮泥环则起到清除杂质的效果,从而避免了杂质进入第一喷浆内套筒412和第一喷浆内套筒412之间的情况,有利于延长使用寿命。
87.如图7所示,第二喷浆臂42包括第二喷浆外套筒421、第二喷浆内套筒422、第二喷浆驱动55器、第二位移传感器、第二铜套424、第二刮泥环423,第二喷浆臂42的具体结构与第一喷浆臂41的具体结构相同,此处不再赘述。
88.在一些实施例中,喷浆装置100具有工作形态和闲置形态,在工作形态,第一喷浆臂41和第二喷浆臂42伸展,喷浆基架51转动至喷浆臂组4一侧并与第二喷浆臂42垂直,在闲置形态,第一喷浆臂41和第二喷浆臂42收缩,喷浆基架51转动至与第二喷浆臂42平行的位置,且喷浆基架51和第二喷浆臂42重合。
89.具体地,如图2和图4所示,在工作形态,喷浆组件5可以通过喷浆臂组4转动至前侧,喷浆基架51则可以转动至喷浆臂组4的左侧或右侧,且喷浆基架51沿着左右方向延伸。然后通过第一喷浆驱动53和第二喷浆驱动55的伸缩完成喷涂。
90.在闲置形态,如图1至图3所示,第一喷浆臂41和第二喷浆臂42均收缩至最短,第二喷浆臂42可以摆动至第一喷浆臂41的后侧,喷浆基架51可以转动至大体沿着前后方向延伸的位置,喷浆基架51则可以向前转动,此时,在前后方向上,喷浆基架51大体和第二喷浆臂42重叠,这样一方面可减少空间占用率,另一方面当喷浆装置100安装在车体200上时,喷浆组件5位于车体200的后侧,从而避免了重心前移的情况,均衡了结构分布,有利于提升移动的稳定性。
91.在一些实施例中,喷浆组件5包括喷浆导向杆54和喷浆导向座,喷浆导向杆54和喷浆导向座的其中一者设在喷浆基架51上、另一者设在喷浆滑架52上,喷浆导向杆54与喷浆导向座导向配合以使喷浆滑架52和喷浆基架51可相对滑移,第一喷浆驱动53的伸缩方向和喷浆导向杆54的延伸方向一致。
92.具体地,如图8所示,喷浆导向杆54可以固定在喷浆滑架52上,喷浆导向座固定在喷浆基架51上,喷浆导向座上设有导向孔,喷浆导向杆54导向配合在喷浆导向座的导向孔内。喷浆导向杆54的延伸方向和第一喷浆驱动53的驱动方向一致,由此,当第一喷浆驱动53伸展时,喷浆导向杆54可以在喷浆导向座的导向孔内滑移,从而实现喷浆滑架52的定向驱
动。喷浆导向杆54和喷浆导向座的设置增强了喷浆滑架52移动的导向性。
93.可选地,喷浆导向杆54和喷浆导向座可以均设有两个以上,如图2和图8所示,当设有两个时,两个喷浆导向杆54均固定在喷浆滑架52上并沿着喷浆滑架52的宽度方向平行间隔布置,两个喷浆导向座均固定在喷浆基架51上并沿着喷浆基架51的宽度方向间隔布置,两个喷浆导向杆54均导向配合在对应喷浆导向座内,由此,可以增强喷浆滑架52移动的导向性。
94.在一些实施例中,第二喷浆驱动55包括喷浆链条551和喷浆马达552,喷浆马达552的驱动端通过齿轮与喷浆链条551啮合传动,喷头56设在喷浆链条551上,喷浆马达552适于通过驱动喷浆链条551转动以驱动喷头56移动。
95.具体地,如图8所示,喷浆滑架52上可以设有从动齿轮,喷浆马达552的驱动端则设有主动齿轮,喷浆马达552设在喷浆滑架52的一端,从动齿轮设在喷浆滑架52的另一端,喷浆链条551为环形并啮合环绕在主动齿轮和从动齿轮的外周侧,喷头56可以与喷浆链条551固定相连,由此,当喷浆马达552驱动链条转动时即可带动喷头56移动,从而实现喷涂位置的调整。为了增强喷头56移动的导向性,喷头56可以通过导轨结构导向滑移装配在喷浆滑架52上。
96.在一些实施例中,包括第一储料罐1、第二储料罐2和清洗剂储罐3,第一储料罐1、第二储料罐2、清洗剂储罐3均与喷头56连通,第一储料罐1适于存储第一料,第二储料罐2适于存储第二料,第一料和第二料适于在喷头56处喷出并速凝混合,清洗剂储罐3适于存储清洗剂,清洗剂适于清洗喷头56。
97.具体地,如图1所示,第一储料罐1、第二储料罐2、清洗剂储罐3可以均安装在车体200上,使用时,可以用高压泵将泵第一料与第二料通过管道输送到喷头56处混合,利用压力将带速凝剂的混合料喷射到被喷巷道墙面后迅速固化,形成带有弹性的外壳将巷道表面危险落石稳定固定,起到维护顶板的作用,喷浆完成后自动启动清洗剂罐中的高压泵用管道将清洗剂注入喷头56中清洗剩余的混合料以便下次使用。
98.在一些实施例中,如图6所示,第三喷浆驱动43可以包括安装板431、驱动马达432、蜗杆433、涡轮434和角度编码器435,驱动马达432可以驱动蜗杆433转动,蜗杆433可以驱动涡轮434转动,从而实现回转驱动。安装板431则方便了第三喷浆驱动43和第一喷浆臂41的连接固定,角度编码器435则方便了实时监测第三喷浆驱动43的转动角度。
99.在一些实施例中,喷浆臂组4的各个关机处均可以安装有编码器,从而方便了实时监测转动角度,进而有利于实现自动化调控。
100.在一些实施例中,可以利用包围盒算法对喷浆装置100进行优化计算,由此,可以避免喷浆装置100在动作过程中与与巷道之间可能发生的碰撞,在机构运动规划时采取相应的控制策略避免碰撞发生,或发出碰撞预警、停止危险操作。
101.在一些实施例中,可以在各个关节位置设置激光跟踪仪,可以提高执行机构的空间运动精度。
102.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必
须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
103.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体地限定。
104.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
105.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
106.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
107.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1