一种间歇井抽油机用智能控制系统
1.本实用新型属于石油开采技术领域,具体涉及一种间歇井抽油机用智能控制系统。
背景技术:
2.在油田低渗透区域,抽油机空抽现象非常严重,这样既浪费电能又使抽油机增加不必要的磨损,间歇采油方式是低产低渗透油田节能降耗的重要手段,间歇采油方式是油井生产一段时间,停止生产,让地层中的流体流入井筒,等到液面恢复到一定程度时,再进行生产。油井间歇采油是避免抽油泵干磨、降低系统耗电的最有效手段。而目前抽油机间歇开启或停止依靠的是工人倒岗时间法和示功图法。工人倒岗时间法主要根据岗位工人倒换岗位时间来进行统一制定,如每天白天抽夜间停等。统一固定的间抽时间,虽然方便了生产管理,但由于每口井供液能力不同,不能保证每口井都能在足够的供液能力下生产,同时也存在能耗浪费的现象,无法做到发挥油层能量和保证节能效果的最优化生产。抽油井示功图是由载荷随位移的变化关系曲线所构成的封闭曲线,是分析抽油泵工作状况的主要依据,也是日常分析、诊断油井运行情况的一项关键指标。当油井供液较好时,功图比较饱满;当供液能力小于采出能力时,液面下降,油井处于供液不足状态。对于间歇出液井,若采用24小时生产,大部分时间示功图显示严重供液不足,泵效较低。如依托现有的油井数字化系统,远程可以得到油井的示工图,由于抽油井井下情况复杂,在生产的过程中,油井的深井泵将受到制造质量、安装质量,以及沙、蜡、水、气、供液和腐蚀等多种因素影响,所以实测工图的形状很不规则。为了正确分析和解释工图,常需要以理论示工图和典型示工图为基础,进行分析和解释实测示工图。所以对实测示工图的分析和解释实则需要操作人员具有一定的理论知识和现场实践经验。另外人工分析和解释示工图无法实现24小时连续不间断地对示功图进行跟踪监测,自动化智能化低,效率差。
技术实现要素:
3.本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种间歇井抽油机用智能控制系统,其系统结构简单,设计合理,实现方便,能够有效应用在间歇井的抽油机控制中,根据油液聚集饱满度,自动开启抽油机电机的工作,智能化程度高,采油效率高,使用效果好,便于推广使用。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种间歇井抽油机用智能控制系统,包括控制箱,所述控制箱包括第一箱体和第二箱体,所述第一箱体内安装有数据采集处理模块,所述第二箱体内安装有抽油机电机控制模块,所述数据采集处理模块包括微处理器和与微处理器相接的触摸显示屏,所述微处理器的输入端接有信号输入电路模块和按键模块,所述信号输入电路模块的输入端接有设置在抽油机光杆上的载荷传感器和位移传感器,所述微处理器的输出端接有输出控制电路模块和指示灯,所述抽油机电机控制模块与输出控制电路模块的输出端连接,所述抽油机电机控制模块的输出端与抽油机电机
的输入端连接。
5.上述的一种间歇井抽油机用智能控制系统,所述触摸显示屏、按键模块和指示灯设置在第一箱体的表面。
6.上述的一种间歇井抽油机用智能控制系统,所述微处理器包括stm32f103zct6微控制器。
7.上述的一种间歇井抽油机用智能控制系统,所述信号输入电路模块包括六路光耦隔离数字输入电路和两路光耦隔离脉冲输入电路。
8.上述的一种间歇井抽油机用智能控制系统,所述按键模块包括启动按键和停止按键。
9.上述的一种间歇井抽油机用智能控制系统,所述输出控制电路模块包括光耦隔离数字输出电路。
10.上述的一种间歇井抽油机用智能控制系统,所述抽油机电机控制模块包括继电器和接触器,所述继电器的线圈与输出控制电路模块的输出端连接,所述接触器的线圈与继电器的常开触点连接,所述抽油机电机与接触器的主触点连接。
11.本实用新型与现有技术相比具有以下优点:
12.1、本实用新型系统结构简单,设计合理,实现方便。
13.2、本实用新型通过在抽油机光杆上设计载荷传感器和位移传感器,检测抽油机光杆工作时的载荷数据和位移数据,通过载荷数据和位移数据判断出油井的供液情况,从而得出抽油机间抽时间段和间歇时间段。
14.3、本实用新型的控制箱分为第一箱体和第二箱体,弱电控制部分的数据采集处理模块安装在第一箱体内,强电控制部分的抽油机电机控制模块安装在第二箱体内,弱强电分离,避免强电控制部分给弱电控制部分的数据采集处理造成干扰。
15.4、本实用新型的信号输入电路模块和输出控制电路模块均采用光耦隔离,避免对微处理器造成干扰,提高了微处理器采集数据和控制的准确性。
16.5、本实用新型能够有效应用在间歇井的抽油机控制中,根据油液聚集饱满度,自动开启抽油机电机的工作,智能化程度高,采油效率高,使用效果好,便于推广使用。
17.综上所述,本实用新型系统结构简单,设计合理,实现方便,能够有效应用在间歇井的抽油机控制中,根据油液聚集饱满度,自动开启抽油机电机的工作,智能化程度高,采油效率高,使用效果好,便于推广使用。
18.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
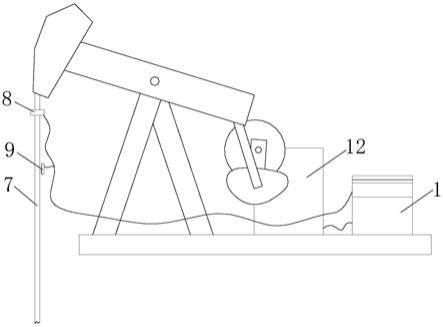
19.图1为本实用新型的结构示意图;
20.图2为本实用新型控制箱的结构示意图;
21.图3为本实用新型的系统原理框图;
22.图4为本实用新型一路光耦隔离数字输入电路的原理图;
23.图5为本实用新型两路脉冲极性整流电路的原理图;
24.图6为本实用新型极性整流后的脉冲输入电路光耦隔离和显示控制电路的原理图;
25.图7为本实用新型光耦隔离数字输出电路的原理图。
26.附图标记说明:
27.1—控制箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
1—第一箱体;
ꢀꢀꢀꢀꢀꢀꢀꢀ1‑
2—第二箱体;
28.3—微处理器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—触摸显示屏;
ꢀꢀꢀꢀꢀꢀꢀꢀ
5—信号输入电路模块;
29.6—按键模块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7—抽油机光杆;
ꢀꢀꢀꢀꢀꢀꢀꢀ
8—载荷传感器;
30.9—位移传感器;
ꢀꢀꢀꢀꢀꢀꢀ
10—输出控制电路模块; 11—指示灯;
31.12—抽油机电机;
ꢀꢀꢀꢀꢀꢀ
13—继电器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14—接触器。
具体实施方式
32.如图1~图3所示,本实用新型的间歇井抽油机用智能控制系统,包括控制箱1,所述控制箱1包括第一箱体1
‑
1和第二箱体1
‑
2,所述第一箱体1
‑
1内安装有数据采集处理模块,所述第二箱体1
‑
2内安装有抽油机电机控制模块,所述数据采集处理模块包括微处理器3和与微处理器3相接的触摸显示屏4,所述微处理器3的输入端接有信号输入电路模块5和按键模块6,所述信号输入电路模块5的输入端接有设置在抽油机光杆7上的载荷传感器8和位移传感器9,所述微处理器3的输出端接有输出控制电路模块10和指示灯11,所述抽油机电机控制模块与输出控制电路模块10的输出端连接,所述抽油机电机控制模块的输出端与抽油机电机12的输入端连接。
33.具体实施时,将控制箱1分为第一箱体1
‑
1和第二箱体1
‑
2,弱电控制部分的数据采集处理模块安装在第一箱体1
‑
1内,强电控制部分的抽油机电机控制模块安装在第二箱体1
‑
2内,弱强电分离,避免强电控制部分给弱电控制部分的数据采集处理造成干扰。
34.通过设置在抽油机光杆7上的载荷传感器8和位移传感器9检测抽油机光杆7工作时的载荷数据和位移数据,通过载荷数据和位移数据判断出油井的供液情况,从而得出抽油机间抽时间段和间歇时间段。
35.本实施例中,如图2所示,所述触摸显示屏4、按键模块6和指示灯11设置在第一箱体1
‑
1的表面。
36.具体实施时,通过触摸显示屏4向微处理器3输入预先设定的液位恢复时长、满液开机时长等参数。
37.本实施例中,所述微处理器3包括stm32f103zct6微控制器。
38.具体实施时,stm32f103zct6微控制器的工作温度为
‑
40~+85℃,高低温性能满足石油行业苛刻的使用环境要求,运行时钟主频为72mhz,运行速度快,能够满足数据采集、分析处理的实时性要求。
39.本实施例中,所述信号输入电路模块5包括六路光耦隔离数字输入电路和两路光耦隔离脉冲输入电路。
40.具体实施时,六路光耦隔离数字输入电路均采用光耦ps2805
‑
4进行了隔离,将外界的干扰有效的与微处理器3进行了隔离,使得微处理器3的抗干扰性得到了极大地提高,图4为其中一路光耦隔离数字输入电路的原理图;两路光耦隔离脉冲输入电路采用光耦acpl_m61l进行了隔离,提高微处理器3接收数据的准确性,图5为两路脉冲极性整流电路的原理图,图6为极性整流后的脉冲输入电路光耦隔离和显示控制电路的原理图。
41.本实施例中,所述按键模块6包括启动按键和停止按键。
42.本实施例中,所述输出控制电路模块10包括光耦隔离数字输出电路。
43.具体实施时,光耦隔离数字输出电路均采用光耦ps2805
‑
4进行隔离,防止外界的干扰信号侵入到微处理器3中,图7为光耦隔离数字输出电路的原理图。
44.本实施例中,所述抽油机电机控制模块包括继电器13和接触器14,所述继电器13的线圈与输出控制电路模块10的输出端连接,所述接触器14的线圈与继电器13的常开触点连接,所述抽油机电机12与接触器14的主触点连接。
45.本实用新型使用时,按下按键模块6中的启动按键,系统上电开始工作,微处理器3读取预先通过触摸显示屏4设置保存在微处理器3中的采集油井供液情况所需时间t1、液位恢复时长t2和满液开机时长t3等参数。
46.抽油机电机12工作,微处理器3计时,计时时间到达采集油井供液情况所需时间t1时,微处理器3读取载荷传感器8和位移传感器9采集到的实测数据来判断油井油液聚集是否饱满;当油井油液聚集饱满时,抽油机电机12继续工作,微处理器3重新开始计时,计时时间到达满液开机时长t3时,微处理器3再次读取载荷传感器8和位移传感器9采集到的实测数据来判断油井油液聚集是否饱满;当油井油液聚集不足时,抽油机电机12停止工作,微处理器3再次计时,计时时间到达液位恢复时长t2时,抽油机电机12工作,微处理器3读取载荷传感器8和位移传感器9采集到的实测数据来判断油井油液聚集是否饱满,实现间歇井抽油机的智能控制,进而实现间歇井的间歇采油。
47.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是根据本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1