一种井下作业用可退式管状落物打捞装置的制作方法
1.本实用新型涉及钻井打捞设备技术领域,具体为一种井下作业用可退式管状落物打捞装置。
背景技术:
2.在油、气田的勘探和开采作业过程中经常发生作业设备掉落或作业设备上的组成部件脱落到钻井中,井中的管状落物会对后续钻井工作产生影响,目前打捞管状落物的工具抓捞尺寸范围有限,仅能够打捞特定尺寸的管状落物,因此需要根据不同的管状落物管径更换打捞装置,使用起来十分不便,对井下作业产生了效率影响。
3.为此,提出一种井下作业用可退式管状落物打捞装置。
技术实现要素:
4.本实用新型的目的在于提供一种井下作业用可退式管状落物打捞装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种井下作业用可退式管状落物打捞装置,包括上壳体,所述上壳体的下表面焊接有下壳体,所述上壳体的前表面安装有控制器,所述上壳体的内部底壁焊接有四个支撑架,所述支撑架的外表面安装有伺服电机,所述支撑架的内侧壁通过轴承铰接有线轮,所述线轮的内侧壁与所述伺服电机的输出轴焊接,所述线轮的外表面绕接有钢缆,所述钢缆的外表面下部焊接有连接支柱,四个所述连接支柱的下表面焊接有打捞机构;
6.所述打捞机构包括筒体、机架、信号收发器、步进电机、蜗轮、三个蜗杆轴、六个摇臂、六个液压缸、六个连接筒、三个网体和六个压力传感器,所述筒体焊接于所述机架的上表面,所述步进电机的外表面与所述筒体的内侧壁固定连接,所述步进电机的输出轴与所述蜗轮的内侧壁焊接,所述蜗轮的轮齿与所述蜗杆轴的蜗杆齿啮合,所述蜗杆轴的两端轴肩与两个摇臂的内侧壁焊接,所述摇臂的内侧壁与所述液压缸的外表面固定连接,所述液压缸的活塞杆粘接于所述连接筒的内侧壁,所述连接筒的外表面与所述网体的外表面粘接,所述液压缸的活塞杆下表面安装有压力传感器,所述筒体的上表面安装有信号收发器,所述压力传感器的电性输出端与所述信号收发器的电性输入端电性连接,所述信号收发器的信号输出端与所述控制器的信号输入端信号连接;
7.所述控制器的电性输出端与所述伺服电机、液压泵和所述步进电机的电性输入端电性连接。
8.作为本技术方案的进一步优选的:所述下壳体的下表面通过螺钉螺纹连接有六个万向轮。
9.作为本技术方案的进一步优选的:所述支撑架的外表面焊接有限位板,所述钢缆的外表面与所述限位板的内侧贴合。
10.作为本技术方案的进一步优选的:所述打捞机构还包括三个液压泵,所述液压泵
的外表面与所述筒体固定连接,所述液压泵的出油口与所述液压缸的进油口连通。
11.作为本技术方案的进一步优选的:所述打捞机构还包括三个绕辊,所述绕辊焊接于所述机架的外表面下部,所述网体的外表面与所述机架的外表面绕接。
12.作为本技术方案的进一步优选的:所述蜗轮的下表面通过轴承与所述机架的内侧壁底部转动连接,所述蜗杆轴的两端轴肩与所述机架的内侧壁通过轴承转动连接。
13.与现有技术相比,本实用新型的有益效果是:
14.一、利用四组伺服电机配合四组线轮,四者互相配合带动打捞机构进行井下行进,打捞机构由步进电机驱动蜗轮,带动轮系机构工作,驱动六组摇臂带动六组液压缸钩拉,配合绕辊带动网体伸缩,实现对管状物的挖式打捞,满足自适应不同内径的油井打捞需求的同时,还可以根据实际情况还可以通过控制器输出步进电机指定脉冲次数,即可调节液压缸的钩拉角度,满足实际情况下的不同使用效果;
15.二、利用压力传感器配合液压缸的活塞杆底部,在实际工作过程中可以反馈井内壁是否完全配合液压缸及网体的电信号,并由信号收发器传递至控制器反馈于工作人员,辅助满足使用效果,从而避免破坏井壁。
附图说明
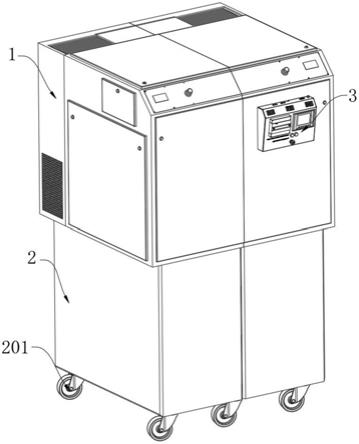
16.图1为本实用新型的立体结构示意图;
17.图2为本实用新型的上壳体与下壳体剖视视角立体结构示意图;
18.图3为本实用新型的支撑架立体结构示意图;
19.图4为本实用新型的线轮立体结构示意图;
20.图5为本实用新型的打捞机构立体结构示意图;
21.图6为本实用新型的机架立体结构示意图;
22.图7为本实用新型的摇臂立体结构示意图;
23.图8为本实用新型的电路图。
24.图中:1、上壳体;2、下壳体;201、万向轮;3、控制器;4、支撑架;401、限位板;5、伺服电机;6、线轮;601、钢缆;7、连接支柱;8、打捞机构;801、筒体;802、机架;803、液压泵;804、信号收发器;805、步进电机;806、蜗轮;807、蜗杆轴;808、摇臂;809、液压缸;810、绕辊;811、连接筒;812、网体;813、压力传感器。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例
27.请参阅图1
‑
8,本实用新型提供一种技术方案:一种井下作业用可退式管状落物打捞装置,包括上壳体1,上壳体1的下表面焊接有下壳体2,上壳体1的前表面安装有控制器3,上壳体1的内部底壁焊接有四个支撑架4,支撑架4的外表面安装有伺服电机5,支撑架4的内侧壁通过轴承铰接有线轮6,线轮6的内侧壁与伺服电机5的输出轴焊接,线轮6的外表面绕
接有钢缆601,钢缆601的外表面下部焊接有连接支柱7,四个连接支柱7的下表面焊接有打捞机构8;
28.打捞机构8包括筒体801、机架802、信号收发器804、步进电机805、蜗轮806、三个蜗杆轴807、六个摇臂808、六个液压缸809、六个连接筒811、三个网体812和六个压力传感器813,筒体801焊接于机架802的上表面,步进电机805的外表面与筒体801的内侧壁固定连接,步进电机805的输出轴与蜗轮806的内侧壁焊接,蜗轮806的轮齿与蜗杆轴807的蜗杆齿啮合,蜗杆轴807的两端轴肩与两个摇臂808的内侧壁焊接,摇臂808的内侧壁与液压缸809的外表面固定连接,液压缸809的活塞杆粘接于连接筒811的内侧壁,连接筒811的外表面与网体812的外表面粘接,液压缸809的活塞杆下表面安装有压力传感器813,筒体801的上表面安装有信号收发器804,压力传感器813的电性输出端与信号收发器804的电性输入端电性连接,信号收发器804的信号输出端与控制器3的信号输入端信号连接;
29.控制器3的电性输出端与伺服电机5、液压泵803和步进电机805的电性输入端电性连接。
30.本实施例中,具体的:下壳体2的下表面通过螺钉螺纹连接有六个万向轮201;万向轮201为整体装置提供移动需求。
31.本实施例中,具体的:支撑架4的外表面焊接有限位板401,钢缆601的外表面与限位板401的内侧贴合;限位板401用于限制钢缆601的收放位置,避免四组钢缆601之间产生干涉,同时避免单组钢缆601产生大幅度震颤。
32.本实施例中,具体的:打捞机构8还包括三个液压泵803,液压泵803的外表面与筒体801固定连接,液压泵803的出油口与液压缸809的进油口连通;液压泵803用于连通外界液压油箱,为液压缸809进行供油。
33.本实施例中,具体的:打捞机构8还包括三个绕辊810,绕辊810焊接于机架802的外表面下部,网体812的外表面与机架802的外表面绕接;网体812在非使用状态下绕接储存于绕辊810,配合打捞机构8的下降过程中减小整体面积,满足使用效果。
34.本实施例中,具体的:蜗轮806的下表面通过轴承与机架802的内侧壁底部转动连接,蜗杆轴807的两端轴肩与机架802的内侧壁通过轴承转动连接;蜗轮806的另一侧与机架802进行配合,满足支撑效果,蜗杆轴807的两侧轴肩与机架802进行配合,满足支撑效果。
35.本实施例中,具体的:控制器3的具体型号为fx3ga;伺服电机5的具体型号为yzs
‑
10
‑
4;液压泵803的具体型号为ts
‑
30;步进电机805的具体型号为ds
‑
25rs370。
36.工作原理或者结构原理:首先将整体装置行驶至预设井口处,利用控制器3控制四组伺服电机5启动,伺服电机5带动线轮6进行放线,及打捞机构8整体向井下行进;
37.在打捞过程中,通过控制器3控制步进电机805启动,步进电机805带动蜗轮806啮合三组蜗杆轴807旋转,每组蜗杆轴807驱动两组摇臂808向上挖动,且通过控制器3控制液压泵803为液压缸809供油,驱动其活塞杆配合井内壁,并由压力传感器813时刻监测活塞杆行驶情况,当活塞杆触碰井口内壁后,压力传感器813通过信号收发器804传递至控制器3反馈于工作人员进行相应操作,满足自适应不同内径的油井需求,还可以根据实际情况还可以通过控制器3输出步进电机805指定脉冲次数,即可调节摇臂808和液压缸809的钩拉角度,满足实际情况下的不同使用效果;
38.在液压缸809的活塞杆行进过程中,连接筒811也会不断配合绕辊810带动网体812
伸张并扩大打捞面积,并铺张至井口内径的最大尺寸,随后通过控制器3驱动伺服电机5反转,带动打捞机构8及其打捞物提出井口。
39.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1