一种轻型井口无人修井作业装置的制作方法
1.本实用新型涉及井口修井装置技术领域,具体涉及一种轻型井口无人修井作业装置。
背景技术:
2.在油田的开发生产过程中,油水井生产一段时间后,井下常常会发生故障需要对其进行检维修,或根据生产需要对其进行调参调层、补孔、油层改造、注水调配等措施作业,以此来发挥油井的最佳产能,实现油井的经济开发。油水井的检维修和措施的实现都需要通过修井作业来完成,在油水井的作业施工时,油管的起下作业通常需由一名司钻操作修井机起下油管,两名井口操作工抬换井口吊卡、摘挂吊环及油管井口对中和上卸扣,一名地面作业工将油管从滑道上排放到管杆排或从管杆排抬放到滑道上,至少需要四名作业人员配合作业方可完成。
3.这种作业方式井口由人工操作,因井口操作工长时间在井口作业,随时存在挤压、高空物体坠落、机械伤害、井喷等安全风险,严重危害井口作业人员的生命安全;同时频繁抬换吊卡,劳动强度高,工作效率低。随着我国大多数的油田都已经进入中、后期开采阶段,各类油水井维护和措施逐步增多,油田修作业工作量的日益增加,人员老龄化日趋严重,施工人员的劳动强度和安全风险日益加大,因此,对常规修井装备进行技术提升和自动化配套越来越成为业界人士关注的焦点。
4.对此,申请公布号为cn109403886a的中国发明专利申请公开了一种井口无人小修作业系统,该作业系统可以实现井口无人化和自动化,包括井口模块、游动模块、场地模块和控制模块;井口模块安装于待修井口正上方,用于井口管柱的扶持、上扣、卸扣;游动模块安装在游钩下方,用于管柱的提拉;场地模块位于井口模块的外围,用于管柱的输送和废液的处理,场地模块包括管柱输送机(即动力猫道);控制模块包括集成控制系统和监控系统。井口模块包括作业平台、与作业平台法兰连接的防喷器、设置于作业平台上的气动卡盘、设置于作业平台上气动卡盘侧上方的自动液压钳、及设置于作业平台上的扶正机械手。
5.但是,上述作业系统由于需要在井口处安装作业平台,而作业平台体积大,安装和拆卸工作量大,作业辅助时间长,影响修井作业效率,同时在井场之间搬迁时难度也比较大,需用大型吊装设备和运输车辆,运输成本比较高。另外,由于自动液压钳和扶正机械手均安装在作业平台上,为了保证这些设备的运行,需要专门为其配备外接电源和液压站动力源,不仅增加了整体成本,而且造成作业系统的结构比较复杂。
技术实现要素:
6.本实用新型的目的在于提供一种轻型井口无人修井作业装置,该装置利用原有修井机的液气电动力源,配套相应的自动液压钳、扶正机械手、自动翻转吊卡、卡瓦、折叠式液压动力猫道等装置及相应的控制,通过技术优化和集成,不需要单独配备作业平台、外接电源和独立液压站,实现井口无人自动化修井作业,达到转场方便、安装拆卸快捷、修井及运
输成本比较低的轻型井口无人修井作业的目的。
7.为实现上述目的,本实用新型中的轻型井口无人修井作业装置采用如下技术方案:
8.一种轻型井口无人修井作业装置,包括:
9.修井机,修井机包括液气电动力源、井架、绞车、游动滑车、连接在游动滑车上的吊环;
10.卡瓦,用于安装在井口防喷器的上方,实现油管在井口的自动卡持;
11.自动翻转吊卡,与所述吊环连接,实现对油管的提升和下放;
12.动力猫道,用于与井口中心对正放置,对油管进行上料输送和下料回接,并将油管送至自动翻转吊卡卡持下井和接回起出油管;
13.自动液压钳,用于对油管进行上扣和卸扣作业;
14.扶正机械手,位于自动液压钳上方,用于配合自动翻转吊卡和动力猫道对油管进行抓取、定位和推送;
15.卡瓦、自动翻转吊卡、动力猫道、自动液压钳以及扶正机械手均与修井机的液气电动力源连接;扶正机械手和自动液压钳安装在修井机的尾部,与修井机集成为一体;轻型井口无人修井作业装置还包括安装在修井机上的集成司钻控制箱,集成司钻控制箱集成有与修井机、卡瓦、自动翻转吊卡、动力猫道、自动液压钳以及扶正机械手控制连接的各种操作阀件手柄、按钮及参数设置,便于司钻工集中操作控制。
16.上述技术方案的有益效果在于:修井机为修井作业提供起下油管的动力及液气电动力源;集成司钻控制箱集成修井作业的各种操作阀件手柄、按钮及参数设置,为司钻工提供集中操作控制;卡瓦用于实现油管柱在井口的自动卡持;动力猫道用于对油管进行上料输送和下料回接等作业,并将油管送至自动翻转吊卡卡持下井和接回起出油管;自动液压钳用于对油管进行上扣和卸扣作业;自动翻转吊卡可以自动翻转实现对油管的抓取和释放,对油管进行提升和下放;扶正机械手配合自动翻转吊卡和动力猫道对油管进行抓取、定位和推送。
17.以上这些都是利用现有技术中存在的相应部件,通过技术优化组合与集成,采取集中自动化控制方式,完成装置各功能之间的配合,实现修井作业井口不需要操作人员,达到井口无人自动化修井作业。
18.本实用新型的创新之处在于:一是卡瓦、自动翻转吊卡、动力猫道、自动液压钳以及扶正机械手均与修井机的液气电动力源连接,由修井机提供液气电动力源,不需要单独配备液压站及保证液压站运行的外接电源,结构更加紧凑,方便统一控制;二是将扶正机械手和自动液压钳均集成安装在修井机的尾部,与修井机集成为一体,这样就不需要独立的修井作业平台,扶正机械手和自动液压钳可以随修井机一起移动,只要修井机移动到位,就可以保证扶正机械手和液压钳到位,省去了安装和拆卸作业平台和液气电路管线及插接件;三是还包括集成司钻控制箱,集成司钻控制箱集成有与修井机、卡瓦、自动翻转吊卡、动力猫道、自动液压钳以及扶正机械手控制连接的各种操作阀件手柄、按钮及参数设置,便于司钻工集中操作控制,自动化程度高,操作控制方便,作业时井口不需要作业人员,实现井口无人化作业。
19.本实用新型的整套装置高度集成,搬迁转场不需要大型吊车和卡车,方便快捷,实
现了修井作业井口无人自动化作业,同时可减少单班作业用工1-2人,削减了作业人员的安全风险、降低了操作人员的劳动强度,可以节省作业准备时间和运输费,提升修井作业效率,是一种简单实用、安全高效的修井作业装置。
20.进一步的,轻型井口无人修井作业装置还包括安装在修井机上的电控液集成控制系统,电控液集成控制系统包括绞车提升控制系统、自动液压钳控制系统、自动翻转吊卡控制系统、扶正机械手控制系统、卡瓦控制系统、动力猫道控制系统以及安全防护报警控制系统。
21.上述技术方案的有益效果在于:便于实现集成控制。
22.进一步的,电控液集成控制系统的操作与设置全部集成于集成司钻控制箱。
23.上述技术方案的有益效果在于:便于司钻工集中操作控制,可实现自动化修井作业的协同工作,同时具备综合监控、联动报警与安全防护等功能,确保了装置的可靠运行。
24.进一步的,集成司钻控制箱分为三个区域,由司钻操作区、管杆控制区与猫道控制区组成,司钻操作区设置有主滚筒控制阀、自动液压钳控制组合阀组、卡瓦控制阀、扶正机械手控制阀、自动翻转吊卡控制阀组。
25.上述技术方案的有益效果在于:司钻工分区操作控制,且各种控制阀设置在司钻操作区,方便实现相应的操作与控制。
26.进一步的,管杆控制区设置有工况选择旋钮、紧急制动旋钮、系统急停按钮、故障复位按钮及参数设置和监控的液晶显示屏,用于实现管杆控制和应急处置;猫道控制区设置有手动/联动旋钮及猫道控制手柄,便于司钻工操作与控制动力猫道,并与修井机实现作业联动。
27.上述技术方案的有益效果在于:管杆控制区便于实现管杆控制和应急处置,猫道控制区便于司钻工操作与控制动力猫道,并与修井机实现作业联动。
28.进一步的,轻型井口无人修井作业装置还包括用于单独控制动力猫道工作的远程遥控器,以实现动力猫道的远程遥控操作。
29.上述技术方案的有益效果在于:便于远程遥控控制动力猫道工作,控制更加灵活方便。
30.进一步的,集成司钻控制箱还安装有综合监控屏、电子指重表、发动机温度表和系统气压表。
31.上述技术方案的有益效果在于:便于对整套装置进行监控、设置等,实现安全生产。
32.进一步的,自动液压钳包括钳架,轻型井口无人修井作业装置还包括安装在钳架上的防喷盒,防喷盒用于收集导流管柱内的污水或油。
33.上述技术方案的有益效果在于:方便对导流管柱内的污水或油进行收集,避免污染。
34.进一步的,所述卡瓦为气动卡瓦,所述自动翻转吊卡为自动液压翻转吊卡,所述动力猫道为折叠式液压动力猫道。
35.上述技术方案的有益效果在于:气动卡瓦、自动液压翻转吊卡的控制和使用更加方便,折叠式液压动力猫道可以在施工作业时展开,搬迁转场时收起,不需要大吨位卡车搬迁转场,节省运输费用。
附图说明
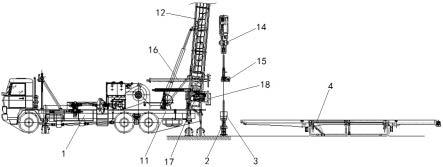
36.图1为本实用新型中轻型井口无人修井作业装置的组成结构图;
37.图2为本实用新型中轻型井口无人修井作业装置的使用状态示意图。
38.图中:1-修井机;11-修井机台面;12-井架;13-大绳;14-游动滑车;15-自动液压翻转吊卡;16-扶正机械手;17-集成司钻控制箱;18-自动液压钳;2-防喷器;3-气动卡瓦;4、4'-折叠式液压动力猫道;5、5'-油管。
具体实施方式
39.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型,即所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
40.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
41.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
42.以下结合实施例对本实用新型的特征和性能作进一步的详细描述。
43.本实用新型中轻型井口无人修井作业装置(以下简称修井作业装置)的一个实施例如图1和图2所示,包括修井机1、防喷器2、气动卡瓦3、折叠式液压动力猫道4,其中修井机1包括修井机台面11以及安装在台面11上的液气电动力源(图中未标示,包括液压站、气源和电源)、井架12和绞车(图中未标示)、游动滑车14、连接在游动滑车14上的吊环(图中未标示),绞车的大绳13绕过井架12上的天车滑轮组(未标注)、游动滑车14、吊环组成游动提升系统。
44.修井作业装置还包括安装在吊环上的自动液压翻转吊卡15,自动液压翻转吊卡15与修井机1的液气电动力源连接,用于对油管5进行提升和下放。自动液压翻转吊卡15属于现有产品,其具体组成和工作原理属于现有技术,主要由主体、活门、锁门、内衬、活门液压缸、活门转销、锁门转销、翻转臂总成等部件组成,自动液压翻转吊卡15可以以合适的角度自动卡持油管5,实现油管5的起下钻作业。
45.折叠式液压动力猫道4与修井机1的液气电动力源连接,用于与井口中心对正放置,对油管5进行上料输送和下料回接,并将油管5送至自动翻转吊卡15卡持下井和接回起出油管。折叠式液压动力猫道4也属于现有产品,其具体组成和工作原理属于现有技术,主
要由底座本体、管柱输送架总成、起升液缸、小车输送装置、输送槽抬头装置、左右抓管装置、调节支腿、液控系统、电控制系统等组成,同时具有本地和远程操作功能。
46.修井作业装置还包括安装在修井机台面11的尾部的自动液压钳18,自动液压钳18用于对油管5进行上扣和卸扣作业,可随修井机1整体运输。自动液压钳18与修井机1的液气电动力源连接,由修井机的液气电动力源提供动力来源。自动液压钳18属于现有产品,其具体组成和工作原理属于现有技术,主要由主钳、背钳、钳架、伸缩液缸、升降液缸及液压系统等部件组成,同时自动液压钳18的钳架上还集成设置有防喷盒(图中未示出),防喷盒用于收集和导流油管内的污水或油,防止污水或油外溢,最终达到清洁化生产。
47.修井作业装置还包括安装在修井机台面11尾部的扶正机械手16,可随修井机1整体运输。扶正机械手16位于自动液压钳18的上方,用于配合自动液压翻转吊卡15和折叠式液压动力猫道4对油管5进行抓取、定位和推送,扶正机械手16与修井机1的液气电动力源连接,由修井机的电源和液压站提供动力来源。扶正机械手16也属于现有产品,其具体组成和工作原理属于现有技术,主要由扶正臂、永磁体、推送缸及液压系统等部件组成。
48.气动卡瓦3安装在防喷器2的上方,共同安装在井口上,气动卡瓦3用于对油管5进行卡持。气动卡瓦3也属于现有产品,其具体组成和工作原理属于现有技术,主要由卡瓦牙、卡瓦体、推送气缸等部件组成,气动卡瓦3与修井机1的液气电动力源连接(图中未示出)。
49.修井作业装置还包括安装在修井机主机平台下的电控液集成控制系统(图中未示出),将各种装置采集到的数据信号经过plc和电脑进行运算和处理,控制装置不到位或出现故障时能及时停机或发出相应的警报;同时通过程序控制,完成一个起下管杆循环后自动复位,实现整套装置的集成化控制和井口无人化操作。电控液集成控制系统包括绞车提升控制系统、自动液压钳控制系统、自动液压翻转吊卡控制系统、扶正机械手控制系统、气动卡瓦控制系统、液压动力猫道控制系统以及安全防护报警控制系统。
50.修井作业装置还包括安装在修井机司钻操作台上的集成司钻控制箱17,集成司钻控制箱17集成有与修井机1、气动卡瓦3、自动液压翻转吊卡15、折叠式液压动力猫道4、自动液压钳18以及扶正机械手16控制连接的各种操作阀件手柄、按钮及参数设置,是将电控液集成控制系统的操作与设置全部集成于此,方便司钻工操作和控制,可实现自动化修井作业的协同工作,同时具备综合监控、联动报警与安全防护等功能,确保了装置的可靠运行。
51.集成司钻控制箱17分为三个区域,由司钻操作区、管杆控制区与猫道控制区组成,并安装有综合监控屏、电子指重表、发动机温度表和系统气压表等,便于对整套装置进行监控、设置等,实现安全生产。司钻操作区主要由主滚筒控制阀、自动液压钳控制组合阀组、气动卡瓦控制阀、扶正机械手控制阀、自动液压翻转吊卡控制阀组等控制装置组成,分别实现相应的操作与控制;管杆控制区主要由工况选择旋钮、紧急制动旋钮、系统急停按钮、故障复位按钮及参数设置和监控的液晶显示屏,实现管杆控制和应急处置;猫道控制区主要由手动/联动旋钮及猫道控制手柄,可由司钻工操作与控制液压动力猫道,并与主机实现作业联动。
52.本实用新型的修井作业装置的创新之处在于:修井机主机提供液气电动力源,不需要单独配备液压站及保证液压站运行的外接电源,结构更加紧凑,方便统一控制;将扶正机械手和自动液压钳均集成安装在修井机的平台尾部,这样就不需要独立的修井作业平台,扶正机械手和自动液压钳可以随修井机一起移动,只要修井机移动到位,就可以保证扶
正机械手和液压钳到位,省去了安装和拆卸作业平台和液气电路管线及插接件;采用折叠式液压动力猫道,施工作业时展开,搬迁转场时收起,方便灵活;采取集成化控制和操作,自动化程度高,操作控制方便,作业时井口不需要作业人员,实现井口无人化作业,可减少单班作业用工1-2人,削减了作业人员的安全风险、降低了操作人员的劳动强度、提升了作业生产的劳动效率;整套装置高度集成,搬迁转场不需要大型吊车和卡车,方便快捷,可以节省作业准备时间和运输费。
53.因此综上,本实用新型的修井作业装置在不改变现有修井机结构和功能的基础上,利用其原有的液气电动力源,配套相应的装置及自动控制系统,在无需外接电源、独立液压站及作业平台的情况下,实现转场轻便、安装拆卸快捷的井口无人修井作业;削减了作业人员的安全风险、降低了操作人员的劳动强度、提升了作业生产的劳动效率,满足油田自动化、智能化、少人化、无人化的发展要求,是一种简单实用、安全高效的修井作业装置。
54.本实用新型的修井作业装置的工作原理是:
55.施工准备过程:
56.修井机主机调整:根据井场环境和井口高低不同,修井机停车到位后,支好液压千斤支腿,将修井机调整找平,立好井架,调整到游动滑车中心与井口中心对齐,打牢井架各道绷绳。
57.折叠式液压动力猫道摆放:将折叠式液压动力猫道吊放在修井机对面,将折叠臂展开,其前端与井口距离为950cm,同时保持修井机-井口-折叠式液压动力猫道为同一直线上,并将其液控和电控线与修井机主机相连。
58.气动卡瓦安装:拆卸井口流程及安装防喷器与常规作业相同,然后用提升短节提出井口油管挂,至第一根油管节箍过封井器100cm左右处,将气动卡瓦吊装到封井器上法兰面并固定牢固,将修井机主机的快插供气管线插接到气动卡瓦的快速接头上,合上气动卡瓦,卡持井下油管,拆卸上部提升短接和油管挂。
59.参数设置:下放游动滑车,将自动液压翻转吊卡卡住油管本体,起出第一根油管,待第二根油管接箍超出气动卡瓦40cm左右处合上气动卡瓦。在集成司钻控制箱上设置自动液压钳推送距离和高度,确保自动液压钳和防喷盒处在自动上卸扣和防喷位置,同时设置上卸扣扭矩值;在集成司钻控制箱上设置扶正机械手位置,调节扶正机械手导轨,使其对准动力猫道位和井口中心两点,保证抓取时油管井口对中和推送距离;将动力猫道与主机联动,调试动力猫道,检测滑车行走轨迹,使其行走轨迹中心线对准井口中心;设置游动滑车上行和下行安全限位,防止游动滑车上顶下砸;设置油管起升和下放限速报警值。
60.所有设置完成后,通过司钻工在集成司钻控制箱处操作,完成起下管柱、液压钳上卸扣、气动卡瓦固定油管、扶正机械手抓放推送油管、自动液压翻转吊卡自动扣合油管,同时与液压动力猫道的遥控配合、无缝对接来实现油管起下作业,取消了井口工在井口取摘吊卡的操作,实现了井口无人自动化操作。具体的,分为以下两个过程:
61.起油管过程:
62.起钻作业时,液压动力猫道滑车滑到前端待命,自动液压翻转吊卡打开状态下检测到油管后自动扣合油管;游动滑车上提,气动卡瓦打开,游动滑车继续上提,到达指定位置后,气动卡瓦关闭;自动液压钳伸到井口中心位置,找正油管后进行自动卸扣作业,卸扣完成后,主钳背钳自动松开,主钳自动对中,自动液压钳回到防喷位,防喷盒自动抱合油管,
游动滑车轻微上提,待油管内油水混合物排出后,防喷盒自动打开,自动液压钳回到待命位;扶正机械手伸出,将油管推送至动力猫道滑车内(图2中由5
→
5'),扶正机械手缩回至待命位;游动滑车下落,动力猫道滑车随动,动力猫道起升(图2中由4
→
4'),待油管接触到猫道输送架时,自动液压翻转吊卡打开,动力猫道滑车后退,动力猫道下落,通过甩钻装置将油管顶出,滚落在管排架上;自动液压翻转吊卡下放到井口接箍位置,准备抓取下一根油管井下继续起钻作业。
63.下管杆过程:
64.下钻作业时,油管处于待命位置,动力猫道勾臂翻转,将油管翻转到猫道输送架内,动力猫道滑车推动油管到限位装置,动力猫道进行自动测长,测长完成后,测长缸顶起油管,动力猫道滑车将油管前推,测长缸下落将油管放到猫道滚杠上面;猫道起升,动力猫道滑车推动油管到自动液压翻转吊卡下方,自动液压翻转吊卡翻转90度,游动滑车下放后,自动液压翻转吊卡检测到油管后自动扣合油管,游动滑车上提,动力猫道滑车随动,同时扶正机械手伸出到猫道位,接取油管并输送至井口中心(图2中由5'
→
5),扶正机械手自动对中,完成丝扣对接;自动液压钳伸出到井口中心位置,找正油管后进行自动上扣作业,自动液压钳上扣扭矩达到设定值后,主钳背钳松开,主钳自动对中,液压钳回到防喷位;游动滑车上提,气动卡瓦打开,游动滑车下落,将油管下放到指定标尺高度,气动卡瓦关闭,自动液压翻转吊卡下放并打开,翻转后上升到接油管位置,准备抓取下一根油管进行继续下钻作业。
65.施工结束:作业完毕后,通过集成司钻控制箱将自动液压翻转吊卡回收到井架上的吊卡槽内并锁紧;控制液压系统将扶正机械手、自动液压钳收回,将动力猫道折叠并收回,便于井场搬迁和运输。
66.在轻型井口无人修井作业装置的其他实施例中,卡瓦也可以是液动控制;自动翻转吊卡也可以是气动控制;动力猫道也可以是电动控制,且非折叠式。
67.在轻型井口无人修井作业装置的其他实施例中,对于油管内没有污水或油的作业场合,液压钳上可以不安装防喷盒。
68.在轻型井口无人修井作业装置的其他实施例中,根据实际使用需要,集成司钻控制箱可以不安装综合监控屏、电子指重表、发动机温度表和系统气压表。
69.在轻型井口无人修井作业装置的其他实施例中,可以不设置单独控制动力猫道工作的远程遥控器,而仅由司钻工通过集成司钻控制箱来控制动力猫道工作。
70.在轻型井口无人修井作业装置的其他实施例中,根据实际使用需要,管杆控制区与猫道控制区的控制部件可以进行适应性的配置调整。
71.在轻型井口无人修井作业装置的其他实施例中,根据实际使用需要,司钻操作区的控制阀组以及集成司钻控制箱的分区划分均可以进行适应性的配置调整。
72.在轻型井口无人修井作业装置的其他实施例中,电控液集成控制系统的操作与设置可以不是集成于集成司钻控制箱,而是另外单独设置。
73.在轻型井口无人修井作业装置的其他实施例中,可以不设置电控液集成控制系统,而是根据实际使用需要,各控制系统分别单独设置布置。
74.以上所述,仅为本实用新型的较佳实施例,并不用以限制本实用新型,本实用新型的专利保护范围以权利要求书为准,凡是运用本实用新型的说明书及附图内容所作的等同
结构变化,同理均应包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1