一种用于装岩机实现无线遥控操作的装置的制作方法
1.本实用新型属于矿石开采技术领域,具体涉及一种用于装岩机实现无线遥控操作的装置。
背景技术:
2.后卸式铲斗装岩机广泛用于有色金属地下矿山,是一种将矿石装载到矿车上的装载机械,适用于井下巷道断面规格较小的场所生产作业。目前市场上该类设备的操作方式都是人机并行近距离操作,人随设备来回走动操作,且只能铲起铲斗前方的矿石,无法转动将侧边的矿石进行收集,只能人工铲入矿车内,十分辛苦,且人机并行近距离操作,一旦操作不当,极容易发生脱轨侧翻机械伤害事故,存在较大的安全隐患。
技术实现要素:
3.为解决上述背景技术中提出的问题。本实用新型提供了一种用于装岩机实现无线遥控操作的装置,具有能遥控操作无线遥控液压机械转向,无需人工进行操作,且通过液压缸带动底板转动,使得铲斗能够达到作业点全断面装岩,无需人工将矿石铲入矿车的特点。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于装岩机实现无线遥控操作的装置,车架;
5.安装在车架底部的行走机构,其包括至少四个对称设置在车架两侧的车轮,车轮连接有动力驱动单元,用于带动车轮行走;
6.安装在车架上的回转机构,其包括:回转盘、设置在回转盘顶部的底板、用于驱动回转盘旋转的液压缸,以及控制液压缸伸缩的液压动力单元;
7.安装在回转机构上的执行机构,其包括:通过铰接装置设置在底板一端的铲斗,铰接装置上设有一横轴,底板另一端设有提升装置,提升装置通过链条和横轴连接,用于控制铰接装置带动铲斗纵向翻滚;
8.安装在车架上方的控制装置,用于控制行走机构带动车架行走、控制液压动力单元带动回转盘旋转和控制提升装置带动铲斗纵向翻滚,其包括:控制行走机构、液压动力单元和提升装置的控制器、能够为各用电单元供电的电源模块、与控制器进行无线通信的遥控装置。
9.优选的,行走机构为轨轮式,且动力驱动单元包括电机和车轮减速器,电机输出端和车轮减速器连接,车轮减速器和车轮连接。
10.优选的,提升装置包括:电动机、设置在电动机输出端的减速器、设置在减速器上的链轮,设置在链轮一侧的的传动卷筒、链轮通过链条和横轴传动连接。
11.优选的,铰接装置由两斗柄构成,斗柄分为四段,其两侧各开设有一沟槽,沟槽内缠嵌有带弹簧的稳定钢丝绳,稳定钢丝绳一端和底板固定连接,另一端和沟槽固定连接。
12.优选的,铲斗斗口底壁中部下弯,底壁前端设有至少三个合金钢刃齿,底壁与侧壁面均堆焊有硬质合金。
13.优选的,车架上还设有缓冲弹簧,当铲斗翻到车架的末端位置时,铲斗与缓冲弹簧接触。
14.与现有技术相比,本实用新型的有益效果是:
15.1、本实用新型所描述的一种用于装岩机实现无线遥控操作的装置,通过遥控装置无线遥控控制器,使得控制器发出信号给行走机构带动车架前进,直至靠近矿石堆处,然后遥控装置无线遥控控制器发出信号给提升装置控制铲斗下压,然后继续行走,使铲斗边插入矿石堆,直到装满铲斗,然后遥控装置无线遥控控制器发出信号给提升装置控制铲斗提升,然后遥控装置无线遥控控制器发出信号给行走机构带动车架后退,直至远离矿石堆处,然后遥控装置无线遥控控制器发出信号给提升装置控制铲斗继续提升,直至将铲斗翻到车架的末端位置碰撞缓冲弹簧,使铲斗内的矿石靠惯性抛出,落入车架后方的矿车内,然后铲斗复位,通过回转机构使得铲斗能够装巷道两侧的矿石,扩大装载宽度,减少了工作人员的工作强度,同时也保证了无需人机并行近距离操作,人随设备来回走动操作,减少了安全隐患。
附图说明
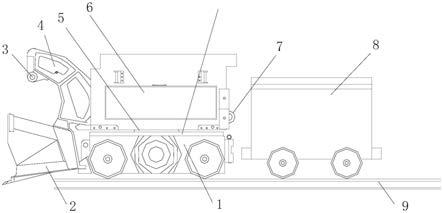
16.图1为本实用新型的正面结构示意图;
17.图2为本实用新型的正面结构工作状态示意图;
18.图3为本实用新型的顶部结构示意图;
19.图4为车架、动力驱动单元和回转盘的零件结构装配示意图;
20.图5本实用新型的顶面结构工作状态示意图
21.图中:1、行走机构;2、铲斗;3、横轴;4、斗柄;5、回转盘;6、控制装置;7、提升装置;8、矿车;9、轨道;10、电动机;11、车架;12、链条; 13、底板;14、铰接部;15、液压动力单元;16、减速器;17、传动卷筒;18、链轮;19、车轮;20、动力驱动单元;21、液压缸;22、缓冲弹簧。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-5,本实用新型提供以下技术方案:一种用于装岩机实现无线遥控操作的装置,车架11;
24.安装在车架11底部的行走机构1,其包括至少四个对称设置在车架11两侧的车轮19,车轮19连接有动力驱动单元20,用于带动车轮19行走:
25.安装在车架11上的回转机构,其包括:回转盘5、设置在回转盘5顶部的底板13、用于驱动回转盘5旋转的液压缸21,以及控制液压缸21伸缩的液压动力单元15,其中液压缸21通过铰接部14和车架11连接;
26.安装在回转机构上的执行机构,其包括:通过铰接装置设置在底板13一端的铲斗2,铰接装置上设有一横轴3,底板13另一端设有提升装置7,提升装置 7通过链条12和横轴3连接,用于控制铰接装置带动铲斗2纵向翻滚;
27.安装在车架11上方的控制装置6,用于控制行走机构1带动车架11行走、控制液压动力单元15带动回转盘5旋转和控制提升装置7带动铲斗2纵向翻滚,其包括:控制行走机构1、液压动力单元15和提升装置7的控制器、能够为各用电单元供电的电源模块、与控制器进行无线通信的遥控装置。
28.具体的,行走机构1为轨轮式,且动力驱动单元20包括电机和车轮减速器,电机输出端和车轮减速器连接,车轮减速器和车轮19连接,保证了拥有足够的扭矩带动车架11行走。
29.具体的,提升装置7包括:电动机10、设置在电动机10输出端的减速器 16、设置在减速器16上的链轮18,设置在链轮18一侧的的传动卷筒17、链轮 18通过链条12和横轴3传动连接,通过电动机10的动力经减速器16和传动卷筒17,传动卷筒17旋转缠绕链条12,链条12经链轮18改变牵引方向,牵拉横轴3,使铲斗2翻到车架11末端位置碰撞缓冲弹簧22,使铲斗2内的矿石靠惯性抛出,装进车架11后面的矿车8内。
30.具体的,铰接装置由两斗柄4构成,斗柄4分为四段,其两侧各开设有一沟槽,沟槽内缠嵌有带弹簧的稳定钢丝绳,稳定钢丝绳一端和底板13固定连接,另一端和沟槽固定连接,保证了铲斗2沿固定位置翻转,不容易侧翻。
31.具体的,铲斗2斗口底壁中部下弯,底壁前端设有至少三个合金钢刃齿,底壁与侧壁面均堆焊有硬质合金,保证了铲斗2更好的寿命。
32.具体的,车架11上还设有缓冲弹簧22,当铲斗2翻到车架11的末端位置时,铲斗2与缓冲弹簧22接触,保证了铲斗2不会直接撞击车架11,更好的保护了车架11。
33.通过采用上述技术方案,本实用新型所描述的一种用于装岩机实现无线遥控操作的装置,通过遥控装置无线遥控控制器,使得控制器发出信号给行走机构1带动车架11前进,直至靠近矿石处,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2下压,然后继续行走,使铲斗2边插入矿石堆,直到装满铲斗2,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2 提升,然后遥控装置无线遥控控制器发出信号给行走机构1带动车架11后退,直至远离矿石处,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2继续提升,直至将铲斗2翻到车架11的末端位置碰撞缓冲弹簧22,使铲斗 2内的矿石靠惯性抛出,落入车架11后方的矿车8内,然后铲斗2复位,通过回转机构使得铲斗2能够装巷道两侧的矿石,扩大装载宽度,减少了工作人员的工作强度,同时也保证了无需人机并行近距离操作,不需要人随设备来回走动操作,减少了安全隐患。
34.本实用新型的工作原理及使用流程:本实用新型所描述的一种用于装岩机实现无线遥控操作的装置,当需要将巷道24内的矿石进行装载运输时,操作人员在车架后部先挂上矿车8,然后通过遥控装置无线遥控控制器,使得控制器发出信号给行走机构1的车轮19在轨道9上行走带动车架11前进,直至靠近矿石处,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2下压,然后继续行走,使铲斗2边插入矿石堆,直到装满铲斗2,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2提升,然后遥控装置无线遥控控制器发出信号给行走机构1带动车架11后退,直至远离矿石处,然后遥控装置无线遥控控制器发出信号给提升装置7控制铲斗2继续提升,直至将铲斗2翻到车架11的末端位置碰撞缓冲弹簧22,使铲斗2内的矿石靠惯性抛出,落入车架 11后方的矿车8内,然后铲斗2复位,通过回转机构使得铲斗2能够装矿道两侧的矿石,扩大装载宽度,保证了无需人机并行近距离
操作,不需要人随设备来回走动操作,减少了安全隐患。
35.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1