盾构推拼同步中基于同块同压的压力控制方法及系统与流程
1.本发明涉及盾构施工工程领域,特指一种盾构推拼同步中基于同块同压的压力控制方法及系统。
背景技术:
2.采用传统盾构法施工时,盾构司机较常见的操作方法是根据盾构机的运动趋势改变推进系统各个分区的比例减压阀开度,从而引导盾构机往目标方向运动。近几年,随着对盾构高效掘进需求的不断提升,盾构推拼同步技术应运而生。其中,以通过充分利用轴向插入封顶块产生的推进油缸行程富余量进行管片拼装作业为原理的盾构推拼同步技术对常规盾构机的改造最小,理论可缩短施工周期30%以上。该盾构推拼同步技术运用过程中,部分油缸回缩为待拼装管片提供操作空间,对应的顶力将缺失。若剩余工作油缸顶力不改变,盾构机的姿态将产生巨大偏差,极易产生工程事故,故须对缺失顶力进行再分配至工作油缸,确保盾构机总顶推力不变。再者,若在同一块管片范围内的油缸顶力不均匀、不一致,那差异性顶力将对已安装的管片产生较为不利的受力状态,管片抗压安全风险较高。因此,需要提出一种新的解决方案以确保盾构推拼同步过程中的管片受力安全。
技术实现要素:
3.本发明的目的在于克服现有技术的缺陷,提供一种盾构推拼同步中基于同块同压的压力控制方法及系统,解决现有的盾构机推进系统调节是依据盾构机司机经验进行的,很难确保同一管片块的顶力均匀致使管片抗压安全风险较高的问题。
4.实现上述目的的技术方案是:
5.本发明提供了一种盾构推拼同步中基于同块同压的压力控制方法,包括如下步骤:
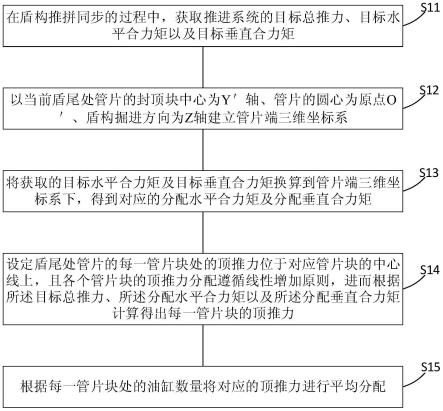
6.在盾构推拼同步的过程中,获取推进系统的目标总推力、目标水平合力矩以及目标垂直合力矩;
7.以当前盾尾处管片的封顶块中心为y'轴、管片的圆心为原点o'、盾构掘进方向为z轴建立管片端三维坐标系;
8.将获取的目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系下,得到对应的分配水平合力矩及分配垂直合力矩;
9.设定盾尾处管片的每一管片块处的顶推力位于对应管片块的中心线上,且各个管片块的顶推力分配遵循线性增加原则,进而根据所述目标总推力、所述分配水平合力矩以及所述分配垂直合力矩计算得出每一管片块的顶推力;
10.根据每一管片块处的油缸数量将对应的顶推力进行平均分配。
11.本发明的压力控制方法可根据输入的目标总推力、目标水平合力矩以及目标垂直合力矩精确的计算出各个油缸的顶推力,且能够确保每一管片块处的油缸的顶推力均匀分配,确保盾构推拼同步过程中的管片受力安全。
12.本发明盾构推拼同步中基于同块同压的压力控制方法的进一步改进在于,在拼装管片的过程中,将对应拼装管片的顶推力分配给其余的管片块以得到对应的增量力值,将每一管片块的增量力值根据油缸数量进行平均分配。
13.本发明盾构推拼同步中基于同块同压的压力控制方法的进一步改进在于,计算增量力值的步骤包括:
14.将推进系统旋转至拼装管片的中心朝下,并以拼装管片的中心位置为y轴、以推进系统的顶端为原点建立直角坐标系xoy;
15.对除拼装管片外的其余各管片块的增量力作用点进行分类,包括位于y轴左侧的第一类区和位于y轴右侧的第二类区,其中所述第一类区包括位于y轴正半轴上的增量力作用点,假定第一类区的增量力值为xiδt+yiδt1,第二类区的增量力值为xiδt+yiδt2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k-1,k为管片块的数量;
16.假设第一类区的管片块的数量为a个,第二类区的管片块的数量为k-1-a个,则有:
[0017][0018][0019][0020]
式一至式三中,δf为拼装管片的顶推力,ni为各管片块的增量力作用点至y轴的距离,li为各管片块的增量力作用点至x轴的距离,l为拼装管片的顶推力作用点至x轴的距离;
[0021]
利用式一至式三求解得出δt0、δt1、δt2的值,从而得到各管片块对应的增量力值。
[0022]
本发明盾构推拼同步中基于同块同压的压力控制方法的进一步改进在于,计算每一管片块的顶推力的步骤包括:
[0023]
假设管片块的数量为k,且各管片块的顶推力作用点位于管片块的对称轴上;
[0024]
对各管片块的顶推力作用点进行分类,包括位于y'轴左侧的第一分区和位于y'轴右侧的第二分区,其中所述第一分区包括位于y'轴上的顶推力作用点,设定第一分区的顶推力为xit0+yit1,第二分区的顶推力为xit0+yit2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k;
[0025]
假设第一分区的管片块的数量为e个,第二分区的管片块的数量为k-e个,则有:
[0026][0027][0028]
式四至式五中,f
t
为目标总推力,ni为各管片块的顶推力作用点至y'轴的距离,m
th
cosβ+m
tv
sinβ为分配水平合力矩;
[0029]
假设在管片端三维坐标系中的o'x'y'平面直角坐标系的第一象限内管片块的顶
推力作用点的数量为a个,第二象限内管片块的顶推力作用点的数量为b个,其中第二象限内的管片块的顶推力作用点包括位于y'正半轴上和x'轴负半轴上的顶推力作用点,第三象限管片块的顶推力作用点数量为c个,其中第三象限管片块的顶推力作用点包括位于y'负半轴上的顶推力作用点,第四象限管片块的顶推力作用点的数量为d个,其中a+b+c+d=k,则有:
[0030][0031]
式六中,mi为各管片块的顶推力作用点至x'轴的距离,m
tv
cosβ-m
th
sinβ为分配垂直合力矩;
[0032]
利用式四至式六求解得出t0、t1、t2的值,从而得到各个管片块的顶推力。
[0033]
本发明盾构推拼同步中基于同块同压的压力控制方法的进一步改进在于,在将目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系的过程中,还包括:
[0034]
以盾构掘进方向为z轴、推进系统的前端所在位置的圆心为原点o建立推进端三维坐标系o-xyz,所述目标总推力的目标力矩点a在推进端三维坐标系中oxy平面直角坐标系的坐标为(mcosα,msinα),满足以下关系:
[0035][0036]
mcosα=m
th
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式八
[0037]
msinα=m
tv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式九
[0038]
式七至式九中,m
th
为目标水平合力矩,m
tv
为目标垂直合力矩,α为推进端三维坐标系中x轴逆时针旋转至目标力矩点与坐标原点o之间的连线角度;
[0039]
将目标力矩点a投影到管片端三维坐标系中ox’y’平面直角坐标系得到投影点a',所述投影点a'的坐标为mcos(α-β),msin(α-β),结合式一至式三,可得到:
[0040]
mcos(α-β)=m
th
cosβ+m
tv
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十
[0041]
msin(α-β)=m
tv
cosβ-m
th
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十一
[0042]
式十和式十一中,β为管片端三维坐标系相对于推进端三维坐标系的旋转角,mcos(α-β)为分配水平合力矩,msin(α-β)为分配垂直合力矩。
[0043]
本发明还提供了一种盾构推拼同步中基于同块同压的压力控制系统,包括:
[0044]
获取单元,用于在盾构推拼同步的过程中,获取推进系统的目标总推力、目标水平合力矩以及目标垂直合力矩;
[0045]
坐标建立单元,用于以当前盾尾处管片的封顶块中心为y'轴、管片的圆心为原点o'、盾构掘进方向为z轴建立管片端三维坐标系;
[0046]
力矩换算单元,与所述获取单元和所述坐标建立单元连接,用于将获取的目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系下,得到对应的分配水平合力矩及分配垂直合力矩;
[0047]
推力计算单元,与所述获取单元和所述力矩换算单元连接,所述推力计算单元基于设定盾尾处管片的每一管片块处的顶推力位于对应管片块的中心线上,且各个管片块的顶推力分配遵循线性增加原则,并根据所述目标总推力、所述分配水平合力矩以及所述分配垂直合力矩计算得出每一管片块的顶推力;以及
[0048]
推力分配单元,与所述推力计算单元连接,用于根据每一管片块处的油缸数量将
对应的顶推力进行平均分配。
[0049]
本发明盾构推拼同步中基于同块同压的压力控制系统的进一步改进在于,还包括增力计算单元,所述增力计算单元与所述推力分配单元连接,用于在拼装管片的过程中,将对应拼装管片的顶推力分配给其余的管片块以得到对应的增量力值;
[0050]
所述推力分配单元用于将每一管片块的增量力值根据油缸数量进行平均分配。
[0051]
本发明盾构推拼同步中基于同块同压的压力控制系统的进一步改进在于,所述增力计算单元在计算增量力值时,将推进系统旋转至拼装管片的中心朝下,并以拼装管片的中心位置为y轴、以推进系统的顶端为原点建立直角坐标系xoy;
[0052]
对除拼装管片外的其余各管片块的增量力作用点进行分类,包括位于y轴左侧的第一类区和位于y轴右侧的第二类区,其中所述第一类区包括位于y轴正半轴上的增量力作用点,假定第一类区的增量力值为xiδt+yiδt1,第二类区的增量力值为xiδt+yiδt2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k-1,k为管片块的数量;
[0053]
假设第一类区的管片块的数量为a个,第二类区的管片块的数量为k-1-a个,则有:
[0054][0055][0056][0057]
式一至式三中,δf为拼装管片的顶推力,ni为各管片块的增量力作用点至y轴的距离,li为各管片块的增量力作用点至x轴的距离,l为拼装管片的顶推力作用点至x轴的距离;
[0058]
利用式一至式三求解得出δt0、δt1、δt2的值,从而得到各管片块对应的增量力值。
[0059]
本发明盾构推拼同步中基于同块同压的压力控制系统的进一步改进在于,所述推力计算单元在计算管片块的顶推力时,假设管片块的数量为k,且各管片块的顶推力作用点位于管片块的对称轴上;
[0060]
对各管片块的顶推力作用点进行分类,包括位于y'轴左侧的第一分区和位于y'轴右侧的第二分区,其中所述第一分区包括位于y'轴上的顶推力作用点,设定第一分区的顶推力为xit0+yit1,第二分区的顶推力为xit0+yit2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k;
[0061]
假设第一分区的管片块的数量为e个,第二分区的管片块的数量为k-e个,则有:
[0062][0063][0064]
式四至式五中,f
t
为目标总推力,ni为各管片块的顶推力作用点至y'轴的距离,m
th
cosβ+m
tv
sinβ为分配水平合力矩;
[0065]
假设在管片端三维坐标系中的o'x'y'平面直角坐标系的第一象限内管片块的顶
推力作用点的数量为a个,第二象限内管片块的顶推力作用点的数量为b个,其中第二象限内的管片块的顶推力作用点包括位于y'正半轴上和x'轴负半轴上的顶推力作用点,第三象限管片块的顶推力作用点数量为c个,其中第三象限管片块的顶推力作用点包括位于y'负半轴上的顶推力作用点,第四象限管片块的顶推力作用点的数量为d个,其中a+b+c+d=k,则有:
[0066][0067]
式六中,mi为各管片块的顶推力作用点至x'轴的距离,m
tv
cosβ-m
th
sinβ为分配垂直合力矩;
[0068]
利用式四至式六求解得出t0、t1、t2的值,从而得到各个管片块的顶推力。
[0069]
本发明盾构推拼同步中基于同块同压的压力控制系统的进一步改进在于,所述力矩换算单元在换算得到分配水平合力矩和分配垂直合力矩时,以盾构掘进方向为z轴、推进系统的前端所在位置的圆心为原点o建立推进端三维坐标系o-xyz,所述目标总推力的目标力矩点a在推进端三维坐标系中oxy平面直角坐标系的坐标为(mcosα,msinα),满足以下关系:
[0070][0071]
mcosα=m
th
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式八
[0072]
msinα=m
tv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式九
[0073]
式七至式九中,m
th
为目标水平合力矩,m
tv
为目标垂直合力矩,α为推进端三维坐标系中x轴逆时针旋转至目标力矩点与坐标原点o之间的连线的角度;
[0074]
将目标力矩点a投影到管片端三维坐标系中ox’y’平面直角坐标系得到投影点a',所述投影点a'的坐标为mcos(α-β),msin(α-β),结合式一至式三,可得到:
[0075]
mcos(α-β)=m
th
cosβ+m
tv
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十
[0076]
msin(α-β)=m
tv
cosβ-m
th
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十一
[0077]
式十和式十一中,β为管片端三维坐标系相对于推进端三维坐标系的旋转角,mcos(α-β)为分配水平合力矩,msin(α-β)为分配垂直合力矩。
附图说明
[0078]
图1为本发明盾构推拼同步中基于同块同压的压力控制方法的流程图。
[0079]
图2为本发明盾构推拼同步中基于同块同压的压力控制系统的系统图。
[0080]
图3为本发明盾构推拼同步中基于同块同压的压力控制方法及系统中目标总推力的坐标转换示意图。
[0081]
图4为本发明盾构推拼同步中基于同块同压的压力控制方法及系统中一管片拼装工况实例的示意图。
[0082]
图5为本发明盾构推拼同步中基于同块同压的压力控制方法及系统中一种较佳实例的全油缸推进模式下的顶力分配示意图。
[0083]
图6为本发明盾构推拼同步中基于同块同压的压力控制方法及系统中一种较佳实例的缺失顶力再分配计算模型图。
具体实施方式
[0084]
下面结合附图和具体实施例对本发明作进一步说明。
[0085]
参阅图1,本发明提供了一种盾构推拼同步中基于同块同压的压力控制方法及系统,用于确保在同一块管片块上各个油缸的顶力均匀分布,确保管片块受力均匀,保证管片受力安全。下面结合附图对本发明盾构推拼同步中基于同块同压的压力控制方法及系统进行说明。
[0086]
参阅图2,显示了本发明盾构推拼同步中基于同块同压的压力控制系统的系统图。下面结合图2,对本发明盾构推拼同步中基于同块同压的压力控制系统进行说明。
[0087]
如图2所示,本发明的盾构推拼同步中基于同块同压的压力控制系统包括获取单元21、坐标建立单元22、力矩换算单元23、推力计算单元24以及推力分配单元25,获取单元21和坐标建立单元22与力矩换算单元23连接,推力计算单元24与获取单元21和力矩换算单元23连接,推力分配单元25与推力计算单元24连接,获取单元21用于在盾构推拼同步的过程中,获取推进系统的目标总推力、目标水平合力矩以及目标垂直合力矩;该推进系统的目标总推力、目标水平合力矩以及目标垂直合力矩较佳由盾构机司机输入或者由盾构智控模块给出。坐标建立单元22用于以当前盾尾处管片的封顶块中心为y'轴、管片的圆心为原点o'、盾构掘进方向为z轴建立管片端三维坐标系;根据封顶块所在的位置不同,盾构推进系统的n组推进油缸将会产生n种管片拼装工况,为确保同一管片块范围内油缸的顶力大小一致,故建立当封顶块位于不同角度时统一的顶力分配计算方法,也即根据建立的管片端三维坐标系计算各管片块处的油缸顶力大小。力矩换算单元23用于将获取的目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系下,得到对应的分配水平合力矩及分配垂直合力矩;结合图3所示,以沿盾构机轴线的掘进方向为z轴正方向,以盾构推进系统圆心为圆点建立推进端三维坐标系o-xyz,管片端三维坐标系相对于推进端三维坐标系的旋转角为β,若是逆时针旋转该旋转角取值为正,若是顺时针旋转该旋转角取值为负。力矩换算单元23根据旋转角β将目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系下。推力计算单元24基于设定盾尾处管片的每一管片块处的顶推力位于对应管片块的中心线上,且各个管片块的顶推力分配遵循线性增加原则,并根据目标总推力、分配水平合力矩以及分配垂直合力矩计算得出每一管片块的顶推力;推力分配单元25于根据每一管片块处的油缸数量将对应的顶推力进行平均分配。
[0088]
盾构机推拼同步过程中包括两种推进模式,一种是全油缸推进模块和推拼同步模式,即当前管片拼装完成至下一块管片拼装之前,盾构机需要进入全油缸推进模式以等待管片拼装的准备工作,而管片拼装过程中,当前拼装管片块处的油缸处于顶力缺失状态。本发明的推力计算单元24用于计算在全油缸推进模式下各个管片块的顶推力。
[0089]
在本发明的一种具体实施方式中,本发明的控制系统还包括增力计算单元,该增力计算单元与推力分配单元连接,用于在拼装管片的过程中,将对应拼装管片的顶推力分配给其余的管片块以得到对应的增量力值;推力分配单元用于将每一管片块的增量力值根据油缸数量进行平均分配。在推拼同步模式下,通过增力计算单元与推力分配单元将拼装管片处缺失的顶力分配给其余管片,确保盾构机保持掘进的姿态,避免盾构机发生偏差。
[0090]
具体地,增力计算单元在计算增量力值时,将推进系统旋转至拼装管片的中心朝下,并以拼装管片的中心位置为y轴、以推进系统的顶端为原点建立直角坐标系xoy,x轴的
正半轴水平向右;结合图6,建立直角坐标系xoy,将推进系统旋转一定角度至拼装管片块中间位置位于y轴负半轴方向,也即拼装管片块b1旋转至y轴负半轴方向。其他各个管片块范围的油缸分别设定独立的区,每个区将分配获得对应的增量力值,再将增量力值根据油缸数量进行均分,从而成为对应油缸的目标增量顶力,各个管片块所形成的区增量力作用点同样位于管片块对称轴上,也即图6中
×
点。
[0091]
对除拼装管片外的其余各管片块的增量力作用点进行分类,包括位于y轴左侧的第一类区和位于y轴右侧的第二类区,其中所述第一类区包括位于y轴正半轴上的增量力作用点,假定第一类区的增量力值为xiδt+yiδt1,第二类区的增量力值为xiδt+yiδt2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k-1,k为管片块的数量;
[0092]
假设第一类区的管片块的数量为a个,第二类区的管片块的数量为k-1-a个,第一类区的管片块顶推力作用点的序号对应范围为1至a,第二类区的管片块顶推力作用点的序号对应范围为a+1至k-1,则有:
[0093]
总顶推力方面满足:
[0094][0095]
水平合力矩方面满足:
[0096][0097]
垂直合力矩方面满足:
[0098][0099]
式一至式三中,δf为拼装管片的顶推力,ni为各管片块的增量力作用点至y轴的距离,li为各管片块的增量力作用点至x轴的距离,l为拼装管片的顶推力作用点至x轴的距离;
[0100]
利用式一至式三求解得出δt0、δt1、δt2的值,从而得到各管片块对应的增量力值。
[0101]
在计算得到各个管片块对应的增量力值后,根据每一管片块处的油缸的数量将增量力值进行分配,并叠加到全油缸推进模式下的顶推力上。
[0102]
在本发明的一种具体实施方式中,推力计算单元在计算管片块的顶推力时,假设管片块的数量为k,且各管片块的顶推力作用点位于管片块的对称轴上;
[0103]
对各管片块的顶推力作用点进行分类,包括位于y'轴左侧的第一分区和位于y'轴右侧的第二分区,其中所述第一分区包括位于y'轴上的顶推力作用点,设定第一分区的顶推力为xit0+yit1,第二分区的顶推力为xit0+yit2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k;t0、t1、t2为待求解的数值;
[0104]
假设第一分区的管片块的数量为e个,第二分区的管片块的数量为k-e个,第一分区的顶推力作用点序号对应范围1至e,第二分区的顶推力作用点序号对应范围e+1至k;则有:
[0105]
[0106][0107]
式四至式五中,f
t
为目标总推力,ni为各管片块的顶推力作用点至y'轴的距离,m
th
cosβ+m
tv
sinβ为分配水平合力矩;
[0108]
假设在管片端三维坐标系中的o'x'y'平面直角坐标系的第一象限内管片块的顶推力作用点的数量为a个,第二象限(含y'轴正半轴和x'轴负半轴)内管片块的顶推力作用点的数量为b个,第三象限(含y'轴负半轴)管片块的顶推力作用点数量为c个,第四象限管片块的顶推力作用点的数量为d个,其中a+b+c+d=k,第一象限内的顶力点序号对应范围为1至a,第二象限内的顶力点序号对应范围为a+1至a+b,第三象限内的顶力点序号对应范围为a+b+1至a+b+c,第四象限内的顶力点序号对应范围为a+b+c+1至k;则有:
[0109][0110]
式六中,mi为各管片块的顶推力作用点至x'轴的距离,m
tv
cosβ-m
th
sinβ为分配垂直合力矩;
[0111]
利用式四至式六求解得出t0、t1、t2的值,从而得到各个管片块的顶推力。
[0112]
在本发明的一种具体实施方式中,力矩换算单元在换算得到分配水平合力矩和分配垂直合力矩时,以盾构掘进方向为z轴、推进系统的前端所在位置的圆心为原点o建立推进端三维坐标系o-xyz,目标总推力的目标力矩点a在推进端三维坐标系中oxy平面直角坐标系的坐标为(mcosα,msinα),满足以下关系:
[0113][0114]
mcosα=m
th
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式八
[0115]
msinα=m
tv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式九
[0116]
式七至式九中,m
th
为目标水平合力矩,m
tv
为目标垂直合力矩,α为推进端三维坐标系中x轴逆时针旋转至目标力矩点与坐标原点o之间的连线的角度;
[0117]
将目标力矩点a投影到管片端三维坐标系中ox’y’平面直角坐标系得到投影点a',投影点a'的坐标为mcos(α-β),msin(α-β),结合式一至式三,可得到:
[0118]
mcos(α-β)=m
th
cosβ+m
tv
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十
[0119]
msin(α-β)=m
tv
cosβ-m
th
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十一
[0120]
式十和式十一中,β为管片端三维坐标系相对于推进端三维坐标系的旋转角,mcos(α-β)为分配水平合力矩,msin(α-β)为分配垂直合力矩。
[0121]
下面以图4至图6所示的实例为例,对本发明的控制系统的顶推力计算过程进行说明。
[0122]
图4显示了由9个管片块构成的一环管片,油缸总数量为34个,结合图3所示,根据封顶块的位置确定管片端三维坐标系与推进端三维坐标系间的旋转角β,获取的目标总顶推力f
t
、目标水平合力矩m
th
、目标垂直合力矩m
tv
,总顶推力目标力矩点a在平面xoy中的坐标(mcosα,msinα)满足以下对应关系:
[0123][0124]
mcosα=m
th
[0125]
msinα=m
tv
[0126]
点a在平面x'o'y'中的投影点a'的坐标可表示为(mcos(α-β),msin(α-β)),其中,
[0127]
mcos(α-β)=mcosαcosβ+msinαsinβ=m
th
cosβ+m
tv
sinβ
[0128]
msin(α-β)=msinαcosβ-mcosαsinβ=m
tv
cosβ-m
th
sinβ
[0129]
在进行顶力分配计算时用到的分配水平合力矩mcos(α-β)和分配垂直合力矩msin(α-β)可表示为式十和式十一。
[0130]
结合图5所示,将坐标系x'o'y'旋转至y'轴位于数值位置,9个管片块分区顶力分配依照线性增加原则,封顶块f的推力目标力矩点为1/2t0,管片块l1的推力目标力矩点为t0+t1,管片块l2的推力目标力矩点为t0+t2,管片块b1的推力目标力矩点为t0+2t1,管片块b2的推力目标力矩点为t0+3t1,管片块b3的推力目标力矩点为t0+4t1,管片块b4的推力目标力矩点为t0+4t2,管片块b5的推力目标力矩点为t0+3t2,管片块b6的推力目标力矩点为t0+2t2;
[0131]
总顶推力应满足:
[0132]
(4t
1-4t2)n
b3
+(3t
1-3t2)n
b2
+
[0133]
(2t
1-2t2)n
b1
+(t
1-t2)n
l1
[0134]
分配水平合力矩应满足:=-(m
th cosβ+m
tv sinβ)
[0135]
(2t0+4t1+4t2)m
b3
+(2t0+3t1+3t2)m
b2-[0136]
(2t0+2t1+2t2)m
b1-(2t0+t1+t2)m
l1-[0137]
分配垂直合力矩应满足:(t0/2)mf=-(m
tv
cosβ-m
th
sinβ)
[0138]
式中,m
b3
、m
b2
、m
b1
、m
l1
、mf分别为b3、b2、b1、l1和f块顶力合力点分别至x’轴的竖向距离,n
b3
、n
b2
、n
b1
、n
l1
分别为b3、b2、b1、l1顶力合力点至y’轴的水平距离,rf~r
l2
为各分区顶推力合力点至坐标原点o’的距离。通过上述三个方程可求解得到t0、t1、t2,各个管片块的顶推力即可计算获得,进而根据油缸数量进行平均分配,就得到了各个油缸对应的顶力,此时为全油缸推进模式。
[0139]
在推拼同步模式下,以管片块b1为拼装管片为例进行说明。如图6所示,建立直角坐标系xoy,将整个推进系统旋转一定角度至b1两块中间位置位于y轴正半轴方向。为便于计算,将f块和l2块设定为一个增量区,其余各管片范围单独设立增量区,各区的推力增量遵循线性分配原则。各区增量须满足以下三个方程:
[0140]-7δ
t
+6δ1+6δ2=f
b1
[0141]
(-δ
t
+δ1)n
b6
+(-δ
t
+2δ1)n
fl2-(-δ
t
)n
b5-(-δ
t
+δ2)n
b4-[0142]
(-δ
t
+2δ2)n
b3
+(δ
1-δ2)3n
l1
=0
[0143]-δ
t
l
b5
+(-δ
t
+δ1)l
b6
+(-δ
t
+δ2)l
b4
+(-δ
t
+2δ1)l
fl2
+
[0144]
(-δ
t
+2δ2)l
b3
+(-2δ
t
+3δ1+3δ2)l
l1
=f
b1
l
b1
[0145]
式中,f
b1
为缺失的顶力,l
b5
、l
b6
、l
b4
、l
fl2
、l
b3
、l
l1
为各增量区分配顶力的力点至x轴的垂直距离,n
b6
、n
fl2
、n
b5
、n
b4
、n
b3
、n
l1
分别为各增量区分配顶力的力点至y轴的水平距离,l
b1
为缺失顶力力点至x轴的距离。
[0146]
经计算,可获得δ
t
、δ1、δ2。
[0147]
将各个区的增量力计算后,平均分配给本区各个推进油缸,分配值与全油缸推进模式下的初始值进行叠加以后,即可成为推拼同步模式下各个油缸的目标顶力。
[0148]
本发明还提供了一种盾构推拼同步中基于同块同压的压力控制方法,下面对该控制方法进行说明。
[0149]
如图1所示,该控制方法包括如下步骤:
[0150]
执行步骤s11,在盾构推拼同步的过程中,获取推进系统的目标总推力、目标水平合力矩以及目标垂直合力矩;接着执行步骤s12;
[0151]
执行步骤s12,以当前盾尾处管片的封顶块中心为y'轴、管片的圆心为原点o'、盾构掘进方向为z轴建立管片端三维坐标系;接着执行步骤s13;
[0152]
执行步骤s13,将获取的目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系下,得到对应的分配水平合力矩及分配垂直合力矩;接着执行步骤s14;
[0153]
执行步骤s14,设定盾尾处管片的每一管片块处的顶推力位于对应管片块的中心线上,且各个管片块的顶推力分配遵循线性增加原则,进而根据所述目标总推力、所述分配水平合力矩以及所述分配垂直合力矩计算得出每一管片块的顶推力;接着执行步骤s15;
[0154]
执行步骤s15,根据每一管片块处的油缸数量将对应的顶推力进行平均分配。
[0155]
在本发明的一种具体实施方式中,在拼装管片的过程中,将对应拼装管片的顶推力分配给其余的管片块以得到对应的增量力值,将每一管片块的增量力值根据油缸数量进行平均分配。
[0156]
在本发明的一种具体实施方式中,计算增量力值的步骤包括:
[0157]
将推进系统旋转至拼装管片的中心朝下,并以拼装管片的中心位置为y轴、以推进系统的顶端为原点建建立直角坐标系xoy;
[0158]
对除拼装管片外的其余各管片块的增量力作用点进行分类,包括位于y轴左侧的第一类区和位于y轴右侧的第二类区,其中所述第一类区包括位于y轴正半轴上的增量力作用点,假定第一类区的增量力值为xiδt+yiδt1,第二类区的增量力值为xiδt+yiδt2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k-1,k为管片块的数量;
[0159]
假设第一类区的管片块的数量为a个,第二类区的管片块的数量为k-1-a个,则有:
[0160][0161][0162][0163]
式一至式三中,δf为拼装管片的顶推力,ni为各管片块的增量力作用点至y轴的距离,li为各管片块的增量力作用点至x轴的距离,l为拼装管片的顶推力作用点至x轴的距离;
[0164]
利用式一至式三求解得出δt0、δt1、δt2的值,从而得到各管片块对应的增量力值。
[0165]
在本发明的一种具体实施方式中,计算每一管片块的顶推力的步骤包括:
[0166]
假设管片块的数量为k,且各管片块的顶推力作用点位于管片块的对称轴上;
[0167]
对各管片块的顶推力作用点进行分类,包括位于y'轴左侧的第一分区和位于y'轴右侧的第二分区,其中所述第一分区包括位于y'轴上的顶推力作用点,设定第一分区的顶
推力为xit0+yit1,第二分区的顶推力为xit0+yit2,xi和yi为人为设定的分配系数,i的取值范围是1
ˉ
k;
[0168]
假设第一分区的管片块的数量为e个,第二分区的管片块的数量为k-e个,则有:
[0169][0170][0171]
式四至式五中,f
t
为目标总推力,ni为各管片块的顶推力作用点至y'轴的距离,m
th
cosβ+m
tv
sinβ为分配水平合力矩;
[0172]
假设在管片端三维坐标系中的o'x'y'平面直角坐标系的第一象限内管片块的顶推力作用点的数量为a个,第二象限内管片块的顶推力作用点的数量为b个,其中第二象限内的管片块的顶推力作用点包括位于y'正半轴上和x'轴负半轴上的顶推力作用点,第三象限管片块的顶推力作用点数量为c个,其中第三象限管片块的顶推力作用点包括位于y'负半轴上的顶推力作用点,第四象限管片块的顶推力作用点的数量为d个,其中a+b+c+d=k,则有:
[0173][0174]
式六中,mi为各管片块的顶推力作用点至x'轴的距离,m
tv
cosβ-m
th
sinβ为分配垂直合力矩;
[0175]
利用式四至式六求解得出t0、t1、t2的值,从而得到各个管片块的顶推力。
[0176]
在本发明的一种具体实施方式中,在将目标水平合力矩及目标垂直合力矩换算到管片端三维坐标系的过程中,还包括:
[0177]
以盾构掘进方向为z轴、推进系统的前端所在位置的圆心为原点o建立推进端三维坐标系o-xyz,所述目标总推力的目标力矩点a在推进端三维坐标系中oxy平面直角坐标系的坐标为(mcosα,msinα),满足以下关系:
[0178][0179]
mcosα=m
th
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式八
[0180]
msinα=m
tv
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式九
[0181]
式七至式九中,m
th
为目标水平合力矩,m
tv
为目标垂直合力矩,α为推进端三维坐标系中x轴逆时针旋转至目标力矩点与坐标原点o之间的连线角度;
[0182]
将目标力矩点a投影到管片端三维坐标系中ox’y’平面直角坐标系得到投影点a',所述投影点a'的坐标为mcos(α-β),msin(α-β),结合式一至式三,可得到:
[0183]
mcos(α-β)=m
th
cosβ+m
tv
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十
[0184]
msin(α-β)=m
tv
cosβ-m
th
sinβ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式十一
[0185]
式十和式十一中,β为管片端三维坐标系相对于推进端三维坐标系的旋转角,mcos(α-β)为分配水平合力矩,msin(α-β)为分配垂直合力矩。
[0186]
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本
发明将以所附权利要求书界定的范围作为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1