一种盾构机自动掘进方法与流程
1.本发明涉及一种盾构机自动掘进方法。
背景技术:
2.随着地铁的快速发展,暗挖施工越来越普及,盾构法以其挖进速度快,占用路面范围小、路面恢复快等优点在城市地铁建设中得到了越来越多的应用,盾构法施工的关键是确保盾构机的姿态和位置是正确的,这样才能保证盾构机的行进和设计路线在偏差的允许范围内。
3.目前国内的设备的类似性很普遍,对人工操作的精细度要求非常高,而随着城市基建的发展,地铁、地下空间开发等工程周边环境愈发敏感,外加地质条件的复杂多变,一旦人工操作失误,极容易发生地表塌陷、隧道淹埋等人身伤亡事故。现有的盾构机姿态控制以及土压控制精度低、渣土改良困难、刀盘泥饼监测处理难,增大了对周边环境和工程风险,对盾构机司机等专业人才需求量大。
技术实现要素:
4.本发明目的在于针对现有技术所存在的不足而提供一种盾构机自动掘进方法的技术方案,该自动掘进方法不仅提高了姿态控制及土压控制的精度,有利于渣土改良,刀盘泥饼监测处理方便,而且降低周边环境和工程风险,减少盾构机司机等专业人才需求量,提高隧道成型质量,降低施工成本,同时可以提高盾构施工的智能化程度,实现自动掘进,弥补人工操作的缺陷、规避风险。
5.为了解决上述技术问题,本发明采用如下技术方案:
6.一种盾构机自动掘进方法,其特征在于包括如下步骤:
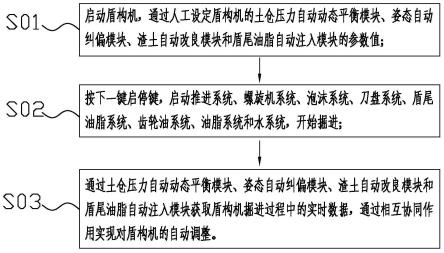
7.s01、启动盾构机,通过人工设定盾构机的土仓压力自动动态平衡模块、姿态自动纠偏模块、渣土自动改良模块和盾尾油脂自动注入模块的参数值;
8.s02、按下一键启停键,启动推进系统、螺旋机系统、泡沫系统、刀盘系统、盾尾油脂系统、齿轮油系统、油脂系统和水系统,开始掘进;
9.s03、通过土仓压力自动动态平衡模块、姿态自动纠偏模块、渣土自动改良模块和盾尾油脂自动注入模块获取盾构机掘进过程中的实时数据,通过相互协同作用实现对盾构机的自动调整。
10.该自动掘进方法不仅提高了姿态控制及土压控制的精度,有利于渣土改良,刀盘泥饼监测处理方便,而且降低周边环境和工程风险,减少盾构机司机等专业人才需求量,提高隧道成型质量,降低施工成本,同时可以提高盾构施工的智能化程度,实现自动掘进,弥补人工操作的缺陷、规避风险。
11.进一步,土仓压力自动动态平衡模块进行调整时,通过自动掘进系统获取盾构机的速度设定值、土仓压力设定值、土仓压力值和管片参数,产生相应的控制信号,控制信号传输至螺旋机泵,通过螺旋机泵反馈至自动掘进系统,同时自动掘进系统根据发泡率和注
入率控制泡沫系统工作,自动掘进系统将推进系统控制信号传输至推进系统pid,经推进系统pid产生模拟信号和压力控制信号,模拟信号作用于土仓的a区、b区、c区和d区,a区、b区、c区和d区将总推力和推进油缸各区行程反馈至自动掘进系统,同时推进油缸各区压力反馈至推进系统pid,压力控制信号输入泵,泵将实际压力值反馈至推进系统pid。
12.进一步,土仓压力自动动态平衡模块还包括土仓压力传感器数据集成计算单元、螺旋机自动控制土仓压力单元和推进系统自动控制土仓压力单元,土仓压力传感器数据集成计算单元用于读取土压传感器的数值,并计算土压纠偏值,螺旋机自动控制土仓压力单元用于通过螺旋机系统控制土仓压力值,推进系统自动控制土仓压力单元用于通过推进系统控制土仓压力值。
13.进一步,土仓压力自动动态平衡模块进行土仓压力调整包括调整螺旋机转速及闸门开口度,控制单位时间出土量和调整土仓压力。
14.进一步,姿态自动纠偏模块对盾构机进行调整时,按设定频率工作,实时集成计算姿态纠偏值,并将纠偏区压调整信号通过plc传输至推进系统,控制区压比例阀调整区压差,实现姿态自动纠偏。
15.进一步,姿态自动纠偏模块包括盾构机掘进线路规划单元、铰接系统姿态自动纠偏单元、盾构姿态模糊控制系统和导向系统,盾构机掘进线路规划单元用于规划路径,铰接系统姿态自动纠偏单元用于控制铰接油缸,盾构姿态模糊控制系统用于优化姿态,导向系统用于控制掘进方向。
16.进一步,渣土自动改良模块对盾构机进行调整时,对渣土参数进行监测,并集成计算渣土状态指标数字信号,通过plc传输至盾构机泡沫系统,调整泡沫注入参数,控制泡沫注入量,实现渣土的自动改良。
17.进一步,渣土自动改良模块包括渣土状态监测集成分析单元、渣土改良剂自动选择单元和渣土改良剂自动注入单元,渣土状态监测集成分析单元用于监测并分析渣土的性能指标,渣土改良剂自动选择单元用于选择合适的渣土改良剂,渣土改良剂自动注入单元用于控制改良剂的注入量。
18.进一步,盾尾油脂自动注入模块对盾构机进行调整时,读取掘进速度及盾尾油脂压力值,根据预先设定的参数值以及单位长度的注入量自动调整油脂泵压力,调节盾尾油脂注入量,实现盾尾油脂的自动注入。
19.进一步,盾尾油脂自动注入模块包括盾尾渗漏情况自动监测单元、油脂注入量自动控制单元和油脂注入点位自动调整单元,盾尾渗漏情况自动监测单元用于监测盾尾的渗漏情况,油脂注入量自动控制单元用于控制油脂的注入量,油脂注入点位自动调整单元用于调整油脂的注入点位。
20.本发明由于采用了上述技术方案,具有以下有益效果:
21.本发明的自动掘进方法不仅提高了姿态控制及土压控制的精度,有利于渣土改良,刀盘泥饼监测处理方便,而且降低周边环境和工程风险,减少盾构机司机等专业人才需求量,提高隧道成型质量,降低施工成本,同时可以提高盾构施工的智能化程度,实现自动掘进,弥补人工操作的缺陷、规避风险。
附图说明
22.下面结合附图对本发明作进一步说明:
23.图1为本发明一种盾构机自动掘进方法的工艺流程图;
24.图2为本发明中土仓自动控制的原理图;
25.图3为本发明中土仓自动控制的流程图;
26.图4为本发明中姿态自动纠偏的原理图;
27.图5为本发明中姿态自动纠偏的流程图;
28.图6为本发明中渣土自动改良控制的流程图;
29.图7为本发明中盾尾油脂自动注入的流程图;
30.图8为本发明中一键启停的控制图。
具体实施方式
31.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
32.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
33.需要说明书的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。
34.如图1至图8所示,为本发明一种盾构机自动掘进方法,包括如下步骤:
35.s01、启动盾构机,通过人工设定盾构机的土仓压力自动动态平衡模块、姿态自动纠偏模块、渣土自动改良模块和盾尾油脂自动注入模块的参数值;
36.土仓压力自动动态平衡模块包括土仓压力传感器数据集成计算单元、螺旋机自动控制土仓压力单元和推进系统自动控制土仓压力单元,土仓压力传感器数据集成计算单元用于读取土压传感器的数值,并计算土压纠偏值,螺旋机自动控制土仓压力单元用于通过螺旋机系统控制土仓压力值,推进系统自动控制土仓压力单元用于通过推进系统控制土仓压力值。土仓压力自动动态平衡模块进行土仓压力调整包括调整螺旋机转速及闸门开口度,控制单位时间出土量和调整土仓压力。
37.姿态自动纠偏模块包括盾构机掘进线路规划单元、铰接系统姿态自动纠偏单元、盾构姿态模糊控制系统和导向系统,盾构机掘进线路规划单元用于规划路径,铰接系统姿态自动纠偏单元用于控制铰接油缸,盾构姿态模糊控制系统用于优化姿态,导向系统用于控制掘进方向。铰接系统姿态自动纠偏单元包括铰接油缸a、铰接油缸b、铰接油缸c和铰接油缸d。
38.渣土自动改良模块包括渣土状态监测集成分析单元、渣土改良剂自动选择单元和渣土改良剂自动注入单元,渣土状态监测集成分析单元用于监测并分析渣土的性能指标,渣土改良剂自动选择单元用于选择合适的渣土改良剂,渣土改良剂自动注入单元用于控制改良剂的注入量。
39.盾尾油脂自动注入模块包括盾尾渗漏情况自动监测单元、油脂注入量自动控制单元和油脂注入点位自动调整单元,盾尾渗漏情况自动监测单元用于监测盾尾的渗漏情况,油脂注入量自动控制单元用于控制油脂的注入量,油脂注入点位自动调整单元用于调整油脂的注入点位。
40.s02、按下一键启停键,启动推进系统、螺旋机系统、泡沫系统、刀盘系统、盾尾油脂系统、齿轮油系统、油脂系统和水系统,开始掘进;
41.s03、通过土仓压力自动动态平衡模块、姿态自动纠偏模块、渣土自动改良模块和盾尾油脂自动注入模块获取盾构机掘进过程中的实时数据,通过相互协同作用实现对盾构机的自动调整。
42.土仓压力自动动态平衡模块进行调整时,通过自动掘进系统获取盾构机的速度设定值、土仓压力设定值、土仓压力值和管片参数,产生相应的控制信号,控制信号传输至螺旋机泵,通过螺旋机泵反馈至自动掘进系统,同时自动掘进系统根据发泡率和注入率控制泡沫系统工作,自动掘进系统将推进系统控制信号传输至推进系统pid,经推进系统pid产生模拟信号和压力控制信号,模拟信号作用于土仓的a区、b区、c区和d区,a区、b区、c区和d区将总推力和推进油缸各区行程反馈至自动掘进系统,同时推进油缸各区压力反馈至推进系统 pid,压力控制信号输入泵,泵将实际压力值反馈至推进系统pid。
43.通过土仓压力自动动态平衡模块读取土压传感器数值,如满足要求,则计算盾构机的实时顶部土压值,并与设定值进行对比,确定土压纠偏值,将土压纠偏值通过plc传输至螺旋机系统,若读取土压传感器数值不满足要求,直接按设定值工作,对盾构机进行土压调整;土压调整包括调整螺旋机转速及闸门开口度,控制单位时间出土量和调整土仓压力,此时土仓压力传感器数据集成计算单元再次计算土压纠偏值,继续控制螺旋机系统,调整土压,直到满足要求。
44.若螺旋机转速及闸门开口度达到设定工作极限后,土压仍不满足设定要求,螺旋机系统按照设定状态工作,plc将纠偏值传输至推进系统控制模块,调整推进速度控制土仓压力,若推进系统达到预设工作极限时,土仓压力仍无法满足要求,盾构机自动关闭所有工作系统,停止推进,采取人工介入分析原因。
45.姿态自动纠偏模块对盾构机进行调整时,按设定频率工作,实时集成计算姿态纠偏值,并将纠偏区压调整信号通过plc传输至推进系统,控制区压比例阀调整区压差,实现姿态自动纠偏。
46.通过人机界面将管片参数输入盾构机掘进线路规划单元,通过人工导入和测量系统分别将隧道设计轴线和盾构机实测坐标经导向系统将盾构姿态和隧道设计轴线输入盾构机掘进线路规划单元,盾构机掘进线路规划单元将下一环目标姿态输入盾构姿态模糊控制系统,盾构姿态模糊控制系统通过铰接系统控制信号控制铰接油缸a、铰接油缸b、铰接油缸c和铰接油缸d工作,铰接油缸a、铰接油缸b、铰接油缸c和铰接油缸d将铰接油缸各区行程反馈至盾构姿态模糊控制系统,盾构姿态模糊控制系统通过推进系统控制信号输入推进系统pid,推进系统pid产生模拟信号和压力控制信号,模拟信号输入a区、b区、c区和d 区,a区、b区、c区和d区将推进油缸各区压力和推进油缸各区行程反馈至推进系统pid,通过导向系统将盾构姿态(1环1次)输入盾构姿态模糊控制系统。
47.当区压差调整至设定值时,盾构机纠偏趋势及姿态仍不满足要求时,盾构机掘进
线路规划单元集成计算铰接伸出值,并将调整信号通过plc传输至铰接系统,调整铰接伸出值,辅助盾构机姿态纠偏,若多次调整,铰接达到极限工作状态后,盾构机姿态及纠偏趋势仍不满足要求,盾构机自动关闭所有工作系统,停止推进,采取人工介入分析原因。
48.渣土自动改良模块对盾构机进行调整时,对渣土参数进行监测,并集成计算渣土状态指标数字信号,通过plc传输至盾构机泡沫系统,调整泡沫注入参数,控制泡沫注入量,实现渣土的自动改良。
49.通过渣土自动改良模块通过渣土状态检测集成分析系统对渣土参数进行监测,该渣土参数主要包括渣土含水率、温度、流动性等,并集成计算渣土状态指标数字信号,通过plc传输至盾构机泡沫系统,调整泡沫注入参数,控制泡沫注入量,实现渣土的自动改良;当泡沫注入量调整不符合要求,则反馈至渣土状态检测集成分析系统继续进行参数调整,当泡沫注入量调整符合要求,则盾构机泡沫系统工作,判断是否需要继续调整,如不过调整,则结束渣土自动改良的操作流程,如果继续调整,则通过渣土状态检测集成分析系统继续进行参数调整,直至满足要求为止。
50.通过盾尾油脂自动注入模块自动读取掘进速度及盾尾油脂压力值,根据预先设定的参数值以及单位长度的注入量自动调整油脂泵压力,调节盾尾油脂注入量,实现盾尾油脂的自动注入;
51.在盾尾位置增加盾尾漏水漏浆检测装置进行渗透检测,当出现盾尾渗漏情况时,将位置信号传输至油脂注入控制系统,增大该位置的油脂注入量,同时将信号传输至同步注浆控制系统,暂停同步浆液注入,待盾尾渗漏情况解决且盾尾密封压力大于设定值时重新启动同步注浆,若掘进距离大于500mm时,仍未接收到同步注浆恢复信号,则自动停止推进,人工处理漏浆情况。
52.该自动掘进方法不仅提高了姿态控制及土压控制的精度,有利于渣土改良,刀盘泥饼监测处理方便,而且降低周边环境和工程风险,减少盾构机司机等专业人才需求量,提高隧道成型质量,降低施工成本,同时可以提高盾构施工的智能化程度,实现自动掘进,弥补人工操作的缺陷、规避风险。
53.以上仅为本发明的具体实施例,但本发明的技术特征并不局限于此。任何以本发明为基础,为实现基本相同的技术效果,所作出地简单变化、等同替换或者修饰等,皆涵盖于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1