一种无人驾驶运输车的制作方法
1.本发明属于矿场井道无人运输技术领域,尤其是涉及一种无人驾驶运输车。
背景技术:
2.在当前矿物开采的过程中,部分的井道直径较小,人员进入有存在安全风险,虽然目前存在无人驾驶运输车,但是矿场内的井道错综复杂,在一些坡度较大的井道内,无法正常行驶;此外部分管道内壁光滑,普通车轮的车辆无法在内部行驶。
技术实现要素:
3.有鉴于此,本发明旨在提出一种无人驾驶运输车,以解决当前无人运输车在矿场坡度较大的井道内行走不便捷的问题。
4.为达到上述目的,本发明的技术方案是这样实现的:
5.一种无人驾驶运输车,包括上车架、下车架、直线运动组件、移动台,所述上车架和下车架上均设有车轮,所述直线运动组件的壳体与下车架固定连接,所述直线运动组件的输出轴与移动台固定连接,上车架上固设有安装杆,所述移动台开有与安装杆对应的导向孔,所述安装杆安装于导向孔内侧,所述安装杆的外侧设有压缩弹簧一,所述压缩弹簧一位于移动台和上车架之间。
6.进一步的,所述导向孔内固设有与安装杆对应的导向管一,所述导向管一的内径与安装杆的直径相匹配,所述安装杆安装于导向管一的内侧。
7.进一步的,所述下车架上固设有导向杆,所述移动台上固设有与导向杆对应的导向管二,所述导向管二的内径与导向杆的直径相匹配,所述导向杆安装于导向管二的内侧。
8.进一步的,所述车轮包括转动块、接触块、压缩弹簧二,所述接触块的数量为多个,多个接触块沿转动块的轴心均匀安装于转动块外侧,所述接触块与转动块之间设有压缩弹簧二,所述接触块远离转动块的端面为弧形面,所述弧形面与转动块同轴心。
9.进一步的,所述接触块临近转动块的端面上固设有插接杆,所述转动块上固设有与插接杆对应的承接管,所述承接管垂直与转动块的轴心设置,所述插接杆远离接触块的一端设有导向凸台,所述导向凸台的直径与承接管的内径相匹配,所述承接管远离转动块的一端内侧设有限位凸台,所述凸台处的内径与插接杆的外径相匹配,所述导向凸台安装于承接管内侧,且位于限位凸台和转动块之间,所述压缩弹簧二安装于承接管外侧。
10.进一步的,所述车轮外侧设有吸盘,所述接触块内设有安装腔,所述吸盘底端与安装板配合安装,所述安装板上开有通孔,所述通孔内侧设有连接螺栓,所述接触块上开有与安装板的通孔对应固定螺纹孔,所述安装板通过连接螺栓与接触块可拆卸连接,所述吸盘安装于安装腔内侧,所述接触块的弧形面上开有与吸盘对应的圆孔,所述吸盘突出弧形面。
11.进一步的,所述吸盘通过快拔组件与安装板配合安装,所述快拔组件包括压紧板一、压缩弹簧三、进气管、安装管,所述压紧板一与吸盘底部配合安装,所述压紧板一内开有与吸盘内部连通的安装孔,所述进气管侧面开有与进气管内部连通的透气孔,所述进气管
安装于安装孔内侧,所述进气管的一端固设有挡板,另一端外侧设有第一凸台,所述安装管的底端与安装板固定连接,所述安装管临近压紧板一的一端内侧设有环形凸台,所述环形凸台处的内径与进气管的外径相匹配,所述挡板安装于安装管内侧,所述压缩弹簧三安装于安装管的内侧,且位于挡板与环形凸台之间。
12.进一步的,所述快拔组件还包括压紧板二,所述压紧板一远离安装管的端面上固设有圆管,所述圆管的内径与安装孔的直径相匹配,所述圆管的外侧开有外螺纹,所述压紧板二上开有与圆管外螺纹相匹配的连接螺纹孔,所述吸盘底端开有与圆管外径相匹配的安装通孔,所述圆管安装于安装通孔内侧,所述压紧板二与圆管螺纹连接,所述压紧板二压紧吸盘;
13.所述压紧板二远离压紧板二的端面上开有转动凹槽,所述压紧板一的侧面设有平面。
14.进一步的,所述进气管与安装孔之间设有密封垫。
15.进一步的,所述安装板上开有与挡板对应的调节螺纹孔,所述调节螺栓孔对应设有调节螺栓,所述调节螺栓与安装板螺纹连接,所述调节螺栓的螺杆顶紧挡板;
16.所述接触块上开有与调节螺栓对应的调节孔。
17.相对于现有技术,本发明所述的一种无人驾驶运输车具有以下有益效果:
18.(1)本发明所述的一种无人驾驶运输车,直线运动组件的输出轴伸长,上车架的车轮顶紧井道的上端面,压缩弹簧一发生压缩,压缩弹簧一给上车架及下车架相反的弹力,使上车架和下车架的车轮分别压紧井道的下端面和上端面,增加车轮与井道壁的摩擦力,使得运输车能够在坡度较大的井道内行驶。
19.(2)本发明所述的一种无人驾驶运输车,当需要拔出吸盘时,安装管向远离吸盘的方向移动,并压紧压缩弹簧三,压缩弹簧三带动挡板及进气管移动,透气孔接触外部大气,外部大气进入吸盘内部,当吸盘内的压强与大气压强一致时,吸盘可以轻松地拔离,减小了拔离吸盘的阻力。
附图说明
20.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
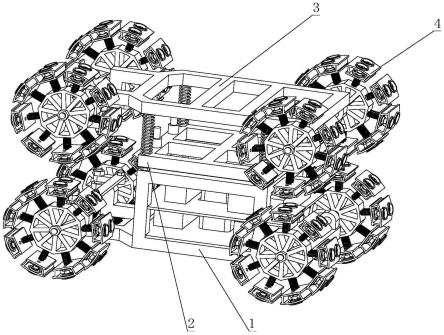
21.图1为本发明实施例所述的运输车立体结构示意图;
22.图2为本发明实施例所述的运输车的上车架、下车架、移动台爆炸结构示意图;
23.图3为本发明实施例所述的下车架结构示意图;
24.图4为本发明实施例所述的上车架结构示意图;
25.图5为本发明实施例所述的移动台结构示意图;
26.图6为本发明实施例所述的车轮立体结构示意图;
27.图7为本发明实施例所述的转动块结构示意图;
28.图8为本发明实施例所述的接触块结构示意图;
29.图9为本发明实施例所述的车轮局部剖面结构示意图;
30.图10为本发明实施例所述的图9中a处结构示意图;
31.图11为本发明实施例所述的吸盘及快拔组件结构示意图;
32.图12为本发明实施例所述的吸盘及快拔组件爆炸结构示意图;
33.图13为本发明实施例所述的图9中b处结构示意图;
34.图14为本发明实施例所述的图13中c处结构示意图;
35.图15为本发明实施例所述的进气管拔出状态剖面结构示意图;
36.图16为本发明实施例所述的压紧板一结构示意图;
37.图17为本发明实施例所述的吸盘结构示意图;
38.图18为本发明实施例所述的运输车使用状态示意图。
39.附图标记说明:
40.1-下车架;2-移动台;3-上车架;4-车轮;5-吸盘;6-直线运动组件; 7-压缩弹簧一;8-快拔组件;101-导向杆;201-导向管二;202-导向管一; 301-安装杆;302-限位螺母;401-转动块;402-接触块;403-压缩弹簧二; 404-承接管;405-插接杆;40201-圆孔;40202-调节孔;40401-限位凸台; 40501-导向凸台;501-安装通孔;801-压紧板二;802-压紧板一;803-安装管;804-安装板;805-调节螺栓;806-进气管;807-挡板;808-压缩弹簧三; 809-密封垫;80101-转动凹槽;80102-连接螺纹孔;80201-圆管;80202-安装孔;80301-环形凸台;80401-调节螺纹孔;80601-透气孔;80602-第一凸台。
具体实施方式
41.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
42.下面将参考附图并结合实施例来详细说明本发明。
43.如图1至图5所示,一种无人驾驶运输车,包括上车架3、下车架1、直线运动组件6、移动台2,上车架3和下车架1上均设有车轮4,直线运动组件6的壳体与下车架1固定连接,直线运动组件6的输出轴与移动台2固定连接,上车架3上固设有安装杆301,移动台2开有与安装杆301对应的导向孔,安装杆301安装于导向孔内侧,安装杆301的外侧设有压缩弹簧一 7,压缩弹簧一7位于移动台2和上车架3之间。直线运动组件6采用但不限于现有电缸。导向孔内固设有与安装杆301对应的导向管一202,导向管一202的内径与安装杆301的直径相匹配,安装杆301安装于导向管一202 的内侧,导向管一202对安装杆301的移动过程起到了导向作用,使上车架 3上下移动过程中更加稳定,安装杆301远离上车架3的一端外侧设有限位螺母302,限位螺母302的上端面顶紧移动台2的下端面。下车架1上固设有导向杆101,移动台2上固设有与导向杆101对应的导向管二201,导向管二201的内径与导向杆101的直径相匹配,导向杆101安装于导向管二201 的内侧,导向管二201对导向杆101起到了导向作用,使移动台2移动的过程中更加稳定。
44.如图6至图10所示,车轮4包括转动块401、接触块402、压缩弹簧二 403,接触块402的数量为多个,多个接触块402沿转动块401的轴心均匀安装于转动块401外侧,接触块402与转动块401之间设有压缩弹簧二403,接触块402远离转动块401的端面为弧形面,弧形面与转动块401同轴心。接触块402临近转动块401的端面上固设有插接杆405,转动块401上固设有与插接杆405对应的承接管404,承接管404垂直于转动块401的轴心设置,插接杆405远离接触块402的一端设有导向凸台40501,导向凸台40501 的直径与承接管404的内径相匹配,承接管404远离转动块401的一端内侧设有限位凸台40401,凸台处的内径与插接杆405
的外径相匹配,导向凸台 40501安装于承接管404内侧,且位于限位凸台40401和转动块401之间,压缩弹簧二403安装于承接管404外侧。
45.如图9及图11至图17所示,车轮4外侧设有吸盘5,接触块402内设有安装腔,吸盘5底端与安装板804配合安装,安装板804上开有通孔,通孔内侧设有连接螺栓,接触块402上开有与安装板804的通孔对应固定螺纹孔,安装板804通过连接螺栓与接触块402可拆卸连接,吸盘5安装于安装腔内侧,接触块402的弧形面上开有与吸盘5对应的圆孔40201,吸盘5突出弧形面。吸盘5通过快拔组件8与安装板804配合安装,快拔组件8包括压紧板一802、压缩弹簧三808、进气管806、安装管803,压紧板一802与吸盘5底部配合安装,压紧板一802内开有与吸盘5内部连通的安装孔80202,进气管806侧面开有与进气管806内部连通的透气孔80601,进气管806安装于安装孔80202内侧,进气管806的一端固设有挡板807,另一端外侧设有第一凸台80602,安装管803的底端与安装板804固定连接,安装管803 临近压紧板一802的一端内侧设有环形凸台80301,环形凸台80301处的内径与进气管806的外径相匹配,挡板807安装于安装管803内侧,压缩弹簧三808安装于安装管803的内侧,且位于挡板807与环形凸台80301之间。快拔组件8还包括压紧板二801,压紧板一802远离安装管803的端面上固设有圆管80201,圆管80201的内径与安装孔80202的直径相匹配,圆管80201 的外侧开有外螺纹,压紧板二801上开有与圆管80201外螺纹相匹配的连接螺纹孔80102,吸盘5底端开有与圆管80201外径相匹配的安装通孔501,圆管80201安装于安装通孔501内侧,压紧板二801与圆管80201螺纹连接,压紧板二801压紧吸盘5;压紧板二801远离压紧板二801的端面上开有转动凹槽80101,压紧板一802的侧面设有平面。进气管806与安装孔80202 之间设有密封垫809,密封垫809保证了密封效果,且进气管806在其内侧移动时马擦力较大。安装板804上开有与挡板807对应的调节螺纹孔80401,调节螺栓805孔对应设有调节螺栓805,调节螺栓805与安装板804螺纹连接,调节螺栓805的螺杆顶紧挡板807;接触块402上开有与调节螺栓805 对应的调节孔40202,拧紧或者松动调节螺栓805,可以调节压缩弹簧三808 的弹力。
46.需要说明的是,下车架1上不仅用于安装电缸,还用于安装控制器、陀螺仪传感器、摄像装置、电机、电池组,摄像装置采用但不限于现有的单目相机,上述电机、电缸、陀螺仪传感器、单目相机均与控制器电连接,在无人驾驶时,陀螺仪传感器采集运输车的姿态信息并将信息传输值控制器,单目相机采集运输车所处位置的图像信息,并将图像信息传输至控制器,控制器对收集到的运输车的姿态信息、图像信息进行识别处理,结合路径规划和智能避障等算法,实现路径规划、智能避障等功能,电机驱动车轮4转动,电池组为控制器、陀螺仪传感器、摄像装置、电机、电缸供电。上述装置及算法均能利用现有技术实现,具体连接关系及其实施方案这里不再赘述。
47.工作过程:
48.当运输车的摄像头和陀螺仪传感器发现运输车在坡度较大的井道行驶时,控制器控制电缸的输出轴伸长,上车架3的车轮4顶紧井道的上端面,压缩弹簧一7发生压缩,压缩弹簧一7给上车架3及下车架1相反的弹力,电缸输出轴与移动台2之间设有压力传感器,当压力传感器读数达到规定值时,电缸停止动作,使上车架3和下车架1的车轮4分别压紧井道的下端面和上端面,增加车轮4与井道壁的摩擦力,使得运输车能够在坡度较大的井道内行驶,(图18所示,运输在垂直的井道内行驶);接触块402与转动之间设有压缩弹簧二403,当
井道壁的表面不平整,有凸起时,压缩弹簧二 403发生压缩,能够抵消凸起的高度带来的影响,保证其他车轮4与井道壁之间的充分接触,将需要运送的物品运送至指定位置。
49.当运输车需要在内壁光滑的管道内行驶时,在接触块402上安装吸盘5,当吸盘5受到车轮4的压紧力时,吸盘5发生变形,吸盘5内部气体排出,随着车轮4的前进,吸盘5复位,吸盘5内的气体压强变小,在外部大气压的作用下吸盘5吸紧管道内壁,随着车轮4的移动,当需要拔出吸盘5时,安装管803向远离吸盘5的方向移动,并压紧压缩弹簧三808,压缩弹簧三 808带动挡板807及进气管806移动,透气孔80601接触外部大气,外部大气进入吸盘5内部,当吸盘5内的压强与大气压强一致时,吸盘5可以轻松地拔离,减小了拔离吸盘5的阻力,进而在保证车轮4与管壁吸紧的同时,又可以防止车轮4的吸盘5与管壁吸紧得过于牢固,而导致车轮4转动阻力太大。
50.本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及方法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
51.在本技术所提供的几个实施例中,应该理解到,所揭露的方法和系统,可以通过其它的方式实现。例如,以上所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。上述单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本发明实施例方案的目的。
52.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1