一种采空区巡检机器人的制作方法
1.本发明属于煤矿开采辅助机械技术领域,特别是涉及一种采空区巡检机器人。
背景技术:
2.当采煤作业完成后,会留下煤矿采空区,如需要继续向纵深开采,通常会对采空区进行适度加固,一般会采用锚杆、木桩支撑等加固措施,用以保证在短时间内,煤矿采空区不会塌陷。若煤矿采空区不再进行加固,且不进行回填,随着时间的增加,煤矿采空区会逐渐塌陷,从而造成地面沉降,并在底表形成塌陷凹坑,而采煤作业完成后,会封闭相关采空区巷道,这会给封闭采空区巷道内的环境监测带来困难,而且煤矿采空区容易发生阴燃情况,因此对煤矿采空区进行环境监测十分必要,但常规监测方式无法有效深入煤矿采空区内,从而导致煤矿采空区的阴燃情况无法被及时发现,进而会导致阴燃灾害的扩大蔓延。
技术实现要素:
3.针对现有技术存在的问题,本发明提供一种采空区巡检机器人,整体采用蛇形结构,能够有效深入煤矿采空区内,并对煤矿采空区内的环境进行全方位监测,可及时发现煤矿采空区的阴燃情况,为阴燃灾害的防治提供技术支持。
4.为了实现上述目的,本发明采用如下技术方案:一种采空区巡检机器人,采用蛇形结构,包括若干单元节模块,由若干单元节模块首尾相连组合而成;所述单元节模块包括模块骨架、行走组件及调姿组件;所述行走组件设置在模块骨架的中后部;所述调姿组件设置在模块骨架的前部。
5.所述行走组件包括行走驱动电机、带轮传动机构及履带式行走机构;所述模块骨架采用矩形框架式结构;所述带轮传动机构设置在模块骨架的后端壁板上;所述履带式行走机构数量为四组,四组履带式行走机构均布设置在模块骨架的四个侧立面上;所述行走驱动电机通过带轮传动机构与履带式行走机构传动连接。
6.所述带轮传动机构包括主动轮、从动轮、换向轮及同步带;所述主动轮固定连接在行走驱动电机的电机轴上;所述从动轮数量为四个,四个从动轮均匀分布在模块骨架后端壁板的四个角点处;所述换向轮数量若干,若干换向轮分布在主动轮四周;所述主动轮、从动轮及换向轮之间通过一根同步带传动连接。
7.所述履带式行走机构包括主动滚筒轮、从动滚筒轮及履带;所述主动滚筒轮设置在模块骨架上且与其后端壁板相邻;所述从动滚筒轮数量若干,若干从动滚筒轮与主动滚筒轮顺序设置且均布排列在模块骨架的侧立面上;所述主动滚筒轮与从动滚筒轮之间通过履带传动连接。
8.在所述模块骨架的侧立面上设置有传动轴,传动轴与主动滚筒轮相邻,且传动轴与主动滚筒轮相平行;在所述传动轴的中部设置有传动轮,传动轮与主动滚筒轮之间通过传动带传动连接;所述传动轴的端部与从动轮的中心轮轴之间连接有传动锥齿轮组。
9.在所述模块骨架的四个侧边部固定设置有边部外罩板;在所述模块骨架的后端壁
板外侧固定设置有端部外罩板。
10.所述调姿组件包括第一调姿驱动电机、第二驱动调姿电机、第一皮带带轮机构、第二皮带带轮机构及双向调姿结构件;所述第一调姿驱动电机和第二驱动调姿电机位于模块骨架内部,且第一调姿驱动电机和第二驱动调姿电机固定连接在模块骨架前端壁板上;所述第二调姿转轴一端通过第一支架与模块骨架相连,所述第二驱动调姿电机的电机轴与第二调姿转轴之间通过第二皮带带轮机构传动连接;所述第一调姿驱动电机通过第一皮带带轮机构与双向调姿结构件传动连接;所述第二驱动调姿电机通过第二皮带带轮机构与双向调姿结构件传动连接。
11.所述双向调姿结构件包括第一支架、第一调姿转轴、第二调姿转轴、第一调姿锥齿轮及第二调姿锥齿轮;所述第一支架位于模块骨架外部,且第一支架固定连接在模块骨架前端壁板上;所述第一调姿转轴一端通过第一支架与模块骨架相连,第一调姿转轴相对于第一支架具有回转自由度;所述第一皮带带轮机构连接在第一调姿驱动电机的电机轴与第一调姿转轴之间,所述第一调姿锥齿轮安装在第一调姿转轴另一端;所述第二调姿转轴一端通过第一支架与模块骨架相连,所述第二皮带带轮机构连接在第二驱动调姿电机的电机轴与第二调姿转轴之间,所述第二调姿锥齿轮安装在第二调姿转轴另一端;所述第一调姿转轴、第二调姿转轴、第一调姿锥齿轮及第二调姿锥齿轮同轴分布,且第一调姿锥齿轮与第二调姿锥齿轮的小径端正对。
12.所述双向调姿结构件还包括第二支架、第三调姿转轴、第三调姿锥齿轮及第四调姿锥齿轮;所述第三调姿转轴固定连接在第二支架上,第三调姿转轴与第一调姿转轴和第二调姿转轴相垂直;所述第一调姿锥齿轮和第二调姿锥齿轮镜像对称分布在第三调姿转轴左右两侧;所述第三调姿锥齿轮固定安装在第三调姿转轴上端,所述第四调姿锥齿轮安装在第三调姿转轴下端,第四调姿锥齿轮相对于第三调姿转轴具有回转自由度,第三调姿锥齿轮与第四调姿锥齿轮的小径端正对;所述第三调姿锥齿轮与第一调姿锥齿轮和第二调姿锥齿轮同时相啮合;所述第四调姿锥齿轮与第一调姿锥齿轮和第二调姿锥齿轮同时相啮合。
13.在每个所述单元节模块的模块骨架内部均设置有无线通信模块和供电模块;所述第二支架与相邻单元节模块的模块骨架上的端部外罩板之间设置有电磁式快速接头,相邻所述单元节模块之间通过电磁式快速接头相连接;在位于最前端的单元节模块上,在其第二支架上用于安装各类传感器和摄像头。
14.本发明的有益效果:
15.本发明的采空区巡检机器人,整体采用蛇形结构,能够有效深入煤矿采空区内,并对煤矿采空区内的环境进行全方位监测,可及时发现煤矿采空区的阴燃情况,为阴燃灾害的防治提供技术支持。
附图说明
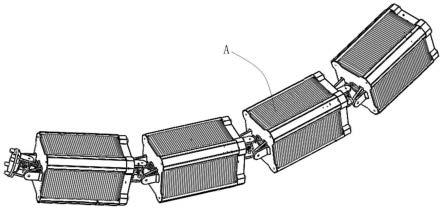
16.图1为本发明的一种采空区巡检机器人的结构示意图;
17.图2为本发明的单元节模块的结构示意图(履带、边部外罩板及端部外罩板未示出);
18.图3为本发明的单元节模块的结构示意图(模块骨架及第一支架未示出);
19.图4为本发明的仅由两个单元节模块进行连接时的结构示意图;
20.图中,a—单元节模块,1—模块骨架,2—行走驱动电机,3—主动轮,4—从动轮,5—换向轮,6—同步带,7—主动滚筒轮,8—从动滚筒轮,9—履带,10—传动轴,11—传动轮,12—传动带,13—传动锥齿轮组,14—边部外罩板,15—端部外罩板,16—第一调姿驱动电机,17—第二驱动调姿电机,18—第一皮带带轮机构,19—第二皮带带轮机构,20—第一支架,21—第二支架,22—第一调姿转轴,23—第三调姿转轴,24—第一调姿锥齿轮,25—第三调姿锥齿轮,26—第四调姿锥齿轮。
具体实施方式
21.下面结合附图和具体实施例对本发明做进一步的详细说明。
22.如图1~4所示,一种采空区巡检机器人,采用蛇形结构,包括若干单元节模块a,由若干单元节模块a首尾相连组合而成;所述单元节模块a包括模块骨架1、行走组件及调姿组件;所述行走组件设置在模块骨架1的中后部;所述调姿组件设置在模块骨架1的前部。
23.所述行走组件包括行走驱动电机2、带轮传动机构及履带式行走机构;所述模块骨架1采用矩形框架式结构;所述带轮传动机构设置在模块骨架1的后端壁板上;所述履带式行走机构数量为四组,四组履带式行走机构均布设置在模块骨架1的四个侧立面上;所述行走驱动电机2通过带轮传动机构与履带式行走机构传动连接。
24.所述带轮传动机构包括主动轮3、从动轮4、换向轮5及同步带6;所述主动轮3固定连接在行走驱动电机2的电机轴上;所述从动轮4数量为四个,四个从动轮4均匀分布在模块骨架1后端壁板的四个角点处;所述换向轮5数量若干,若干换向轮5分布在主动轮3四周;所述主动轮3、从动轮4及换向轮5之间通过一根同步带6传动连接。
25.所述履带式行走机构包括主动滚筒轮7、从动滚筒轮8及履带9;所述主动滚筒轮7设置在模块骨架1上且与其后端壁板相邻;所述从动滚筒轮8数量若干,若干从动滚筒轮8与主动滚筒轮7顺序设置且均布排列在模块骨架1的侧立面上;所述主动滚筒轮7与从动滚筒轮8之间通过履带9传动连接。
26.在所述模块骨架1的侧立面上设置有传动轴10,传动轴10与主动滚筒轮7相邻,且传动轴10与主动滚筒轮7相平行;在所述传动轴10的中部设置有传动轮11,传动轮11与主动滚筒轮7之间通过传动带12传动连接;所述传动轴10的端部与从动轮4的中心轮轴之间连接有传动锥齿轮组13。
27.在所述模块骨架1的四个侧边部固定设置有边部外罩板14;在所述模块骨架1的后端壁板外侧固定设置有端部外罩板15。
28.所述调姿组件包括第一调姿驱动电机16、第二驱动调姿电机17、第一皮带带轮机构18、第二皮带带轮机构19及双向调姿结构件;所述第一调姿驱动电机16和第二驱动调姿电机17位于模块骨架1内部,且第一调姿驱动电机16和第二驱动调姿电机17固定连接在模块骨架1前端壁板上;所述第二调姿转轴一端通过第一支架20与模块骨架1相连,所述第二驱动调姿电机17的电机轴与第二调姿转轴之间通过第二皮带带轮机构19传动连接;所述第一调姿驱动电机16通过第一皮带带轮机构18与双向调姿结构件传动连接;所述第二驱动调姿电机17通过第二皮带带轮机构19与双向调姿结构件传动连接。
29.所述双向调姿结构件包括第一支架20、第一调姿转轴22、第二调姿转轴、第一调姿
锥齿轮24及第二调姿锥齿轮;所述第一支架20位于模块骨架1外部,且第一支架20固定连接在模块骨架1前端壁板上;所述第一调姿转轴22一端通过第一支架20与模块骨架1相连,第一调姿转轴22相对于第一支架20具有回转自由度;所述第一皮带带轮机构18连接在第一调姿驱动电机16的电机轴与第一调姿转轴22之间,所述第一调姿锥齿轮安装在第一调姿转轴22另一端;所述第二调姿转轴一端通过第一支架20与模块骨架1相连,所述第二皮带带轮机构19连接在第二驱动调姿电机17的电机轴与第二调姿转轴之间,所述第二调姿锥齿轮安装在第二调姿转轴另一端;所述第一调姿转轴22、第二调姿转轴、第一调姿锥齿轮24及第二调姿锥齿轮同轴分布,且第一调姿锥齿轮24与第二调姿锥齿轮的小径端正对。
30.所述双向调姿结构件还包括第二支架21、第三调姿转轴23、第三调姿锥齿轮25及第四调姿锥齿轮26;所述第三调姿转轴23固定连接在第二支架21上,第三调姿转轴23与第一调姿转轴22和第二调姿转轴相垂直;所述第一调姿锥齿轮24和第二调姿锥齿轮镜像对称分布在第三调姿转轴23左右两侧;所述第三调姿锥齿轮25固定安装在第三调姿转轴23上端,所述第四调姿锥齿轮26安装在第三调姿转轴23下端,第四调姿锥齿轮26相对于第三调姿转轴23具有回转自由度,第三调姿锥齿轮25与第四调姿锥齿轮26的小径端正对;所述第三调姿锥齿轮25与第一调姿锥齿轮24和第二调姿锥齿轮同时相啮合;所述第四调姿锥齿轮26与第一调姿锥齿轮24和第二调姿锥齿轮同时相啮合。
31.在每个所述单元节模块a的模块骨架1内部均设置有无线通信模块和供电模块;所述第二支架21与相邻单元节模块a的模块骨架1上的端部外罩板15之间设置有电磁式快速接头,相邻所述单元节模块a之间通过电磁式快速接头相连接;在位于最前端的单元节模块a上,在其第二支架21上用于安装各类传感器和摄像头。
32.下面结合附图说明本发明的一次使用过程:
33.当机器人需要行进时,首先启动行走驱动电机2,由行走驱动电机2带动主动轮3转动,转动的主动轮3会通过同步带6带动四个从动轮4同步转动,随着从动轮4轮轴的转动,会通过传动锥齿轮组13带动传动轴10和其上传动轮11转动,传动轮11再通过传动带12带动主动滚筒轮7转动,最终由主动滚筒轮7带动履带9转动,实现机器人的行走移动。
34.当机器人需要改变行进方向时,以相邻两个单元节模块a为例进行说明,若前侧的单元节模块需要进行俯仰动作时,则同步相同启动第一调姿驱动电机16和第二驱动调姿电机17,由第一调姿驱动电机16通过第一皮带带轮机构18驱动第一调姿转轴22及第一调姿锥齿轮24转动,由第二驱动调姿电机17通过第二皮带带轮机构19驱动第二调姿转轴及第二调姿锥齿轮转动,此时第一调姿锥齿轮24和第二调姿锥齿轮可进行同步同向转动,而与第一调姿锥齿轮24和第二调姿锥齿轮相啮合的第三调姿锥齿轮25和第四调姿锥齿轮26无法进行相对转动,只能跟随第一调姿锥齿轮24和第二调姿锥齿轮的转动方向进行随动,而第三调姿转轴23相对于第一调姿转轴22和第二调姿转轴相当于在作摆转运动,并带动第二支架21作俯仰动作,最终带动前侧的单元节模块进行俯仰动作。
35.同理,若前侧的单元节模块需要进行左右摆转运动时,则同步反向启动第一调姿驱动电机16和第二驱动调姿电机17,由第一调姿驱动电机16通过第一皮带带轮机构18驱动第一调姿转轴22及第一调姿锥齿轮24正向转动,由第二驱动调姿电机17通过第二皮带带轮机构19驱动第二调姿转轴及第二调姿锥齿轮反向转动,此时第一调姿锥齿轮24和第二调姿锥齿轮可进行相向转动,而与第一调姿锥齿轮24和第二调姿锥齿轮相啮合的第三调姿锥齿
轮25会被带动进行回转,转动的第三调姿锥齿轮25会带动第三调姿转轴23同步回转,进而带动第二支架21作左右摆转运动,而与第一调姿锥齿轮24和第二调姿锥齿轮相啮合的第四调姿锥齿轮26则在第三调姿转轴23上进行随动空转。
36.当机器人探测距离过远时,机器人与地面通信站的通信信号会变弱,为了延长机器人的探测距离,可以从机器人的尾部断开最后一节单元节模块a,并由断开的单元节模块a作为信号中继器,而断开最后一节单元节模块时,只需控制连接节点处的电磁式快速接头断开即可。
37.实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等效实施或变更,均包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1