一种用于游梁式抽油机的智能调节平衡方法及相关装置与流程
一种用于游梁式抽油机的智能调节平衡方法及相关装置
1.本技术是名为《一种用于游梁式抽油机的智能调节平衡方法及相关装置》的专利申请的分案申请,原申请的申请日为2018年10月18日,申请号为201811214904.9。
技术领域
2.本发明涉及油田生产设备技术领域,更具体地说,涉及一种用于游梁式抽油机的智能调节平衡系统。本发明还涉及一种用于游梁式抽油机的智能调节平衡装置以及计算机可读存储介质。
背景技术:
3.抽油机是一种在油田上广泛使用的采油设备,其工作原理为:通过电机和减速器来驱动设置于油梁上的驴头,使其上下往复运动,从而实现抽油动作。然而,抽油机长期运行,井下油管壁易附着蜡和矿物质,造成抽油机负载过重,从而使得抽油机难以维持良好的平衡。在进行油井洗井过程中,由于井下动液面发生变化,抽油机的载荷也随之变化,如若不能及时调整抽油机平衡,将会影响抽油效果。
4.目前,市面上的抽油机大多无法实现对变化负载的自动平衡,因而,难以使抽油机维持较好的平衡度,抽油机运转的不平衡,将直接影响电机的工作效率、加大电机的功率损耗、减少电机的使用寿命。
技术实现要素:
5.本发明的目的是提供一种用于游梁式抽油机的智能调节平衡方法,用于控制电机转向,以调节游梁尾部摆动装置的移动方向。本发明的另一核心是提供一种用于游梁式抽油机的智能调节平衡装置及其计算机可读存储介质,均具有上述有益效果。
6.本发明提供一种用于游梁式抽油机的智能调节平衡方法,包括以下步骤:
7.s1、获取电源线的三相电压值和三相电流值;
8.s2、对所述三相电压值和所述三相电流值进行降压,得到降压后的三相电压值和降压后的三相电流值;将降压后的三相电压值转换为电压模拟量;将降压后的三相电流值转换为电流模拟量,根据所述电压模拟量及所述电流模拟量计算功率模拟量;分别将所述电压模拟量、所述电流模拟量以及所述功率模拟量转换为电压数字量、电流数字量及功率数字量;
9.s3、在预设时间间隔内,获取功率数字量的最大峰值ws1和最小峰值ws2,对所述最小峰值ws2和所述最大峰值ws1进行除法运算,获得平衡系数k0;
10.s4、判断所述平衡系数k0与第一阀值及第二阀值的大小关系:
11.若所述平衡系数k0小于第一阀值且大于第二阀值,则存储所述功率数字量、所述电压数字量和所述电流数字量;
12.若所述平衡系数k0大于所述第一阀值,则向电机发送正转信号,以使所述电机控制安装于游梁尾部的摆动装置向远离驴头的方向移动,并返回至步骤s2;
13.若所述平衡系数k0小于所述第二阀值,则向所述电机发送反转信号,以使所述电机控制所述摆动装置向靠近驴头的方向移动,并返回至步骤s2;
14.其中,所述第一阀值大于所述第二阀值。
15.优选的,所述用于游梁式抽油机的智能调节平衡方法还包括:
16.采集并存储降压后的三相电压值及降压后的三相电流值。
17.为了实现上述目的,本发明还提供了如下方案:
18.一种用于游梁式抽油机的智能调节平衡装置,包括:
19.电源线电流和电压确定模块,用于获取电源线的三相电压值及三相电流值;
20.降压模块,用于对所述三相电压值和所述三相电流值进行降压,得到降压后的三相电压值和降压后的三相电流值;
21.模拟量转换模块,用于将降压后的三相电压值转换为电压模拟量,将降压后的三相电流值转换为电流模拟量;
22.功率计算模块,用于根据所述电压模拟量及所述电流模拟量,计算功率模拟量;
23.a/d转换模块,用于将所述电压模拟量、所述电流模拟量以及所述功率模拟量转换为电压数字量、电流数字量以及功率数字量;
24.平衡系数确定模块,用于在达到预设时间间隔时,获取所述功率数字量的最大峰值ws1和最小峰值ws2,通过对所述最小峰值ws2和所述最大峰值ws1进行除法运算,确定平衡系数k0;
25.预设范围判断模块,用于判断所述平衡系数k0与第一阀值及第二阀值的大小关系:
26.若所述平衡系数k0小于第一阀值且大于第二阀值,则存储所述电压数字量、所述电流数字量以及所述功率数字量;
27.若所述平衡系数k0大于所述第一阀值,则向电机发送正转信号,以使所述电机控制安装于游梁尾部的摆动装置向远离驴头的方向移动;
28.若所述平衡系数k0小于所述第二阀值,则向所述电机发送反转信号,以使所述电机控制所述摆动装置向靠近驴头的方向移动;
29.其中,所述第一阀值大于所述第二阀值。
30.优选的,所述用于游梁式抽油机的智能调节平衡装置还包括:
31.数据上传模块,用于将所述电压数字量、所述电流数字量以及所述功率数字量输送至外围设备。
32.为了实现上述目的,本发明还提供了如下方案:
33.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的用于游梁式抽油机的智能调节平衡方法的步骤。
34.根据本发明提供的具体实施例,本发明公开了以下技术效果:通过在预设时间间隔时,获取电源线的三相电压值和三相电流值,并将其转换成电压数字量和电流数字量,以及计算功率数字量,并获取周期内的最大峰值ws1和最小峰值ws2,通过对最小峰值ws2和最大峰值ws1进行除法运算,来获得平衡系数k0,通过判断平衡系数k0与第一阀值和第二阀值的关系,向电机发送转向信号,从而使电机控制安装于游梁尾端的摆动装置向靠近驴头或
者远离驴头的方向移动,最终实现抽油机系统的平衡。
附图说明
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
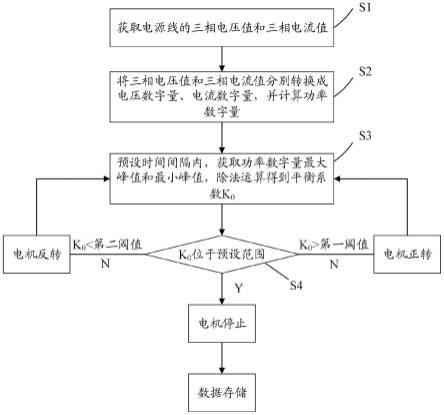
36.图1为本发明所提供的用于游梁式抽油机的智能调节平衡方法的流程示意图。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.本发明的目的是提供一种用于游梁式抽油机的智能调节平衡方法及装置,实现抽油机系统的平衡。
39.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
40.请参考图1,图1为本发明所提供的用于游梁式抽油机的智能调节平衡方法的流程示意图。
41.在该实施方式中,用于游梁式抽油机的智能调节平衡方法包括以下步骤:
42.s1、获取电源线上的三相电压值和三相电流值。
43.s2、将预先获得的三相电压值和三相电流值,分别转换成电压数字量和电流数字量,并计算得到功率数字量。
44.s3、在预设时间间隔内,获取功率数字量的最大峰值ws1和最小峰值ws2,对最小峰值ws2和最大峰值ws1进行除法运算,获得平衡系数k0,也即,
45.s4、判断所述平衡系数k0是否位于预设范围之内:若是,则存储功率数字量,以及电压数字量和电流数字量。
46.若否,则判断平衡系数k0与第一阀值和第二阀值的关系:若平衡系数k0大于第一阀值,则向电机发送正转信号,以使安装于游梁尾部的摆动装置向远离驴头的方向移动,并返回至步骤s2;若平衡系数k0小于第二阀值,则向电机发送反转信号,以使电机控制摆动装置向靠近驴头的方向移动,并返回至步骤s2,其中,第一阀值大于第二阀值。
47.该调节平衡方法,通过在预设时间间隔时,获取电源线的三相电压值和三相电流值,将其转换成电压数字量和电流数字量,并计算得到最大峰值ws1和最小峰值ws2,通过对最小峰值ws2和最大峰值ws1进行除法运算,来获得平衡系数k0,通过判断平衡系数k0与第一阀值和第二阀值的关系,来判断电机的转向,从而使电机控制安装于游梁尾端的摆动装置向靠近驴头或者远离驴头的方向移动,最终实现抽油机系统的平衡。获得的电压数字量和电流数字量以及功率数字量用于存储,以供后续测量值的对比和参照。
和最小峰值ws2,通过对最小峰值ws2和最大峰值ws1进行除法,确定平衡系数k0。
62.预设范围判断模块,用于判断平衡系数k0是否位于预设范围之内:若是,则存储电压数字量、电流数字量以及功率数字量;若否,则判断平衡系数k0与第一阀值和第二阀值的关系:若平衡系数k0大于第一阀值,则电机正转,以控制安装于游梁尾部的摆动装置向远离驴头的方向移动;若平衡系数小于第二阀值,则电机反转,以控制摆动装置向靠近驴头的方向移动;其中,第一阀值大于第二阀值。
63.进一步,模拟量确定模块包括:
64.降压模块,用于获取三相电压值和三相电流值,并将所获取的三相电压值和三相电流值进行降压,并得到降压后的三相电压值和降压后的三相电流值。
65.模拟量转换模块,用于将降压后的三相电压值和降压后的三相电流值分别转换成电压模拟量和电流模拟量。
66.功率计算模块,用于根据所述电压模拟量及所述电流模拟量,计算功率模拟量;
67.模拟量输出模块,用于将电压模拟量、电流模拟量及功率模拟量输出至a/d转换模块。
68.更进一步的,用于游梁式抽油机的智能调节平衡装置还包括:
69.数据上传模块,用于将电压数字量、电流数字量以及功率数字量输送至外围设备。
70.例如,数据上传模块可以为分别用以连接无端电脑、数控中心、监控中心以及外围设备的接口,以实现对外围设备的数据传输。
71.本发明还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,并且该计算机程序被处理器执行时,能够执行上述步骤、实现上述方法。通过计算机程序进行自我学习,能够不停机自动调节,摆动装置的移动位移,且存储的数据可读取可远传。
72.该用于游梁式抽油机的智能调节平衡装置以及计算机可读存储介质,可以实现电机转向进而实现摆动装置移动位移的调节,由此可以实现抽油机系统的力矩平衡。
73.相对于现有技术,本发明用于游梁式抽油机的智能调节平衡装置及计算机可读存储介质与上述用于游梁式抽油机的智能调节平衡方法的有益效果相同,在此不再赘述。
74.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
75.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1