一种送料机构、运输机构及自动升降拱架台车的制作方法
1.本发明涉及隧道掘进技术领域,尤其涉及一种送料机构、运输机构及自动升降拱架台车。
背景技术:
2.一方面,在重物的轨道运输过程中,由于重物较重,通常是将支撑架伸出,支撑架托住重物后回缩,从机构的稳定性和安全性角度出发,需要确保支撑架托住重物回缩至安全位置后运输机构方能开始移动,传统技术中往往是通过设置位移传感器的方式来检测支撑架托住重物是否回缩住安全位置,但是此种方式结构复杂,需要投入传感器的购买成本,成本相对较大。
3.另一方面,在隧道掘进工程施工中,为了将新爆破出的洞口稳固定型,需要将拱形工字钢固定在隧道内部表面,一是防止隧道在工人施工过程中发生坍塌,二是给隧道初步定型,为了便于施工,传统技术是将多根钢管焊接或者螺栓固定成一个支架,然后将支架固定在隧道内施工位置,前端爆破面称为掌子面,即为工作面,隧道侧面为拱形,需要工人架设拱架固定隧道侧面,但是由于支架为多跟钢管焊接过螺栓固定拼接而成,而且还与地面固定连接,不易拆卸,如果此处工作完毕后需要拆卸并重新在下一段隧道内组装,既耗时又耗力,严重影响工作效率,而且由于拱架较重,需要叉车等器械将拱架运输给站在支架上工作的工人,过程繁琐,而且叉车体积较大,还会影响内部工作空间,不利于生产。
4.因此,有必要提出一种能够自动运输拱架且可以灵活移动的台车,以克服现有技术的缺陷。
技术实现要素:
5.本发明的目的是解决现有技术中的问题,提供一种送料机构、运输机构及自动升降拱架台车。
6.本发明的技术方案是:一种送料机构,包括轨道槽、行走轮和支撑架,所述支撑架滑动连接有第一支撑板,所述支撑架设有第二驱动装置,所述第二驱动装置带动第一支撑板相对支撑架移动,所述行走轮在轨道槽内滚动,所述行走轮包括第一转动轮和第二转动轮,所述行走轮与轨道槽之间存在间隙,第一转动轮和第二转动轮可与轨道槽的上顶面或下底面接触。
7.进一步的,所述第一转动轮和第二转动轮之间设有第三转动轮,所述第一转动轮通过第三转动轮带动第二转动轮转动,所述第三转动轮为齿轮,所述第三转动轮通过齿轮啮合将第一转动轮动力传递给第二转动轮。
8.进一步的,所述第二驱动装置包括伺服电机、丝杠和螺母座,所述螺母座与支撑架固定连接,所述丝杠一端与第一支撑板连接,所述伺服电机带动螺母座转动进而使丝杠推动第一支撑板相对支撑架滑动。
9.一种运输机构,包括支架和上述送料机构,所述支架设有升降机构和第一驱动装
置,所述第一驱动装置带动升降机构在支架上移动以实现拱架的竖直方向输送,所述第一支撑板相对支撑架移动将拱架托起,拱架由升降机构转移到第一支撑板上,所述行走轮带动支撑架移动实现拱架水平方向输送。
10.进一步的,所述支架上对称设有两个送料机构,两个送料机构拖住拱架的两端以运输拱架。
11.进一步的,所述支架上对称设有两个升降机构,两个升降机构位于两个送料机构之间一种自动升降拱架台车,包括上述运输机构,所述运输机构设置在支架一端,所述支架另一端滑动连接有第二支撑板,所述第二支撑板在支架顶部和底部之间滑动,所述支架底部设有驱动轮,所述驱动轮可带动支架在隧道内移动。
12.进一步的,所述第二支撑板侧面设有第三支撑板,所述第三支撑板可相对第二支撑板收缩或伸长,所述第二支撑板上安装有第三驱动装置,所述第三驱动装置可带动第三支撑板收缩或伸长。
13.本发明的有益效果在于:一方面,本发明提供了一种送料机构,当第一支撑板伸出并承载重物时,受到重物重力的影响,送料机构整体向重物方向偏斜,第一转动轮和第二转动轮作为两个主动轮在轨道槽内一个与轨道槽上顶面接触,一个与轨道槽下底面接触,此时相当于一个机械的自动锁止机构,第一转动轮和第二转动轮给送料机构的前进力相反,故整体不动,当第一支撑板回缩将重物靠近送料机构后,重物重心逐渐与送料机构重合,送料机构停止前倾,送料机构整体方向回正,从而使得第一转动轮和第二转动轮均与轨道槽下底面接触,此时,第一转动轮和第二转动轮的前进力的方向相同,从而解除送料机构的锁止状态,送料机构开始移动,实现重物的运输,与传统技术中通过安装位移传感器来检测重物是否移动至送料机构上然后给电机通电使送料机构移动的方式相比,本发明仅仅通过纯机械结构,利用重心位置的变化实现了送料机构移动的自动控制,结构简单,用料成本低。
14.另一方面,本发明提供了一种运输机构,通过升降机构将拱架从支架底部运输到支架顶部,然后通过送料机构将拱架由支架顶部的一端运输至工人工作处,升降机构将拱架运输至支架顶部后,第一支撑板拖住拱架,然后升降机构下降,此时第一支撑板代替升降机构拖住拱架,此时第一支撑板继续滑动,移动拱架靠近送料机构,然后送料机构带动第一支撑板和拱架向工人工作处移动,与传统技术相比,本技术方案代替了叉车运输拱架,实现了拱架自动运输。
15.另一方面,本发明还提供了一种自动升降拱架台车,台车掌子面处站立有工人,由于爆破山体时需要对不同位置安装爆破工具,可以升降的第一支撑板满足可工人的需要,替代了工人自己攀爬到支架相应位置高度,减少了人力损耗,提高工作效率。
附图说明
16.图1为本发明送料机构结构参考图;图2 为本发明送料机构使用状态参考图一;图3为本发明送料机构使用状态参考图二;图4为本发明送料机构和运输机构使用状态参考图;
图5为本发明送料机构和运输机构结构图;图6为本发明自动升降拱架台车主视图;图7为本发明自动升降拱架台车侧视图;图8为本发明自动升降拱架台车使用状态参考图。
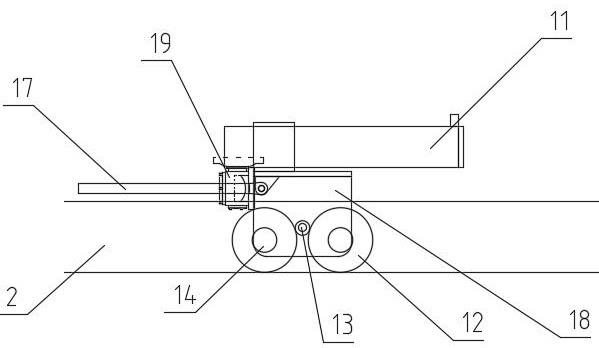
17.附图标记:1、第二支撑板;2、轨道槽;3、送料机构;4、升降机构;5、支架;6、驱动轮;7、第三支撑板;8、隧道;9、拱架;10、行走轮;11、第一支撑板;12、第一转动轮;13、第三转动轮;14、第二转动轮;15、第一驱动装置;16、第二驱动装置;17、丝杠;18、支撑架;19、螺母座;20、伺服电机;21、第三驱动装置。
具体实施方式
18.为了使本发明实现的技术手段、技术特征、发明目的与技术效果易于明白了解,下面结合具体图示,进一步阐述本发明。
19.实施例一:如图1所示,一种送料机构,包括轨道槽2、行走轮10和支撑架18,所述支撑架18滑动连接有第一支撑板11,所述支撑架18设有第二驱动装置16,所述第二驱动装置16带动第一支撑板11相对支撑架18移动,所述行走轮10在轨道槽2内滚动,所述行走轮10包括第一转动轮12和第二转动轮14,所述行走轮10与轨道槽2之间存在间隙,此时第一转动轮12和第二转动轮14均为同一个电机带动的主动轮,第一转动轮12和第二转动轮14可与轨道槽2的上顶面或下底面接触,当第一转动轮12和第二转动轮14与轨道槽2的接触面不同时,即出现锁止现象,送料机构3不移动,当所述第一转动轮12和第二转动轮14之间设有第三转动轮13时,所述第一转动轮12通过第三转动轮13带动第二转动轮14转动,所述第三转动轮13为齿轮,所述第三转动轮13通过齿轮啮合将第一转动轮12动力传递给第二转动轮14,此时电机只需要带动第一转动轮12作为主动轮即可实现第一转动轮12和第二转动轮14的双主动轮,所述第一支撑板11与支撑架18导轨滑动连接,。
20.如图4和图5所示,一种运输机构,包括支架5和送料机构3,轨道槽2安装在支架5顶部,所述支架5设有升降机构4和第一驱动装置15,所述第一驱动装置15带动升降机构4在支架5顶部和底部之间往复移动,所述送料机构3设有行走轮10和第一支撑板11,所述行走轮10可带动送料机构3在支架5顶部移动,所述升降机构4将拱架9运输至支架5顶部,所述第一支撑板11将拱架9托起,所述行走轮10带动送料机构3将拱架9运输至工人工作处,所述行走轮10位于轨道槽2内,所述轨道槽2宽度大于行走轮10直径,所述行走轮10可在轨道槽2内活动,所述行走轮10包括第一转动轮12和第二转动轮14,所述送料机构3设有第二驱动装置16,所述第二驱动装置16带动第一支撑板11滑动至拱架9下方,所述第一支撑板11将拱架9托起,优选的,所述第一驱动装置15为电机,所述第二驱动装置16包括伺服电机20,丝杠17和螺母座19,所述螺母座19与送料机构3固定连接,所述丝杠17一端与第一支撑板11连接,所述第一转动轮12和第二转动轮14之间设有第三转动轮13,所述第一转动轮12通过第三转动轮13带动第二转动轮14转动,所述支架5上对称设有两个送料机构3,两个送料机构3拖住拱架9的两端以运输拱架9,所述支架5上对称设有两个升降机构4,两个升降机构4位于两个送料机构3之间。
21.如图2所示,当第一支撑板11伸出与拱架9接触后,受到拱架9重力的影响,送料机
构3的重心整体前移,偏向拱架9,因此送料机构3整体会前倾,第一转动轮12和第二转动轮14在轨道槽2内一个与轨道槽2上顶面接触,一个与轨道槽2下底面接触,此时相当于一个机械的自动锁止机构,第一转动轮12和第二转动轮14给送料机构3的前进力相反,故整体不动。
22.如图3所示,当第一支撑板11回缩将拱架9靠近送料机构3后,重心后移,送料机构3停止前倾,整体方向回正,从而使得第一转动轮12和第二转动轮14均与轨道槽2下底面接触,此时,两个轮的前进力的方向相同,从而解除送料机构3的锁止状态,行走轮10工作,带动送料机构3向工人工作处移动,实现拱架9的运输。
23.本发明的一方面利用升降机构4和送料机构3实现了拱架9由上下方向的运动改为了左右水平方向的运动,另一方面通过第一支撑板11将升降机构4上的拱架9托起,为拱架9运输方向的变化起到了关键作用,而且利用了重心前移与后移控制送料机构3的工作与否,如果送料机构3在第一支撑板11还没有完全回缩后就运动,很有可能会使拱架9在第一支撑板11上脱落,砸伤工人,只有第一支撑板11回缩过程中,带着拱架9移动过程中,由于拱架9较重,送料机构3与拱架9总重心靠近拱架9,此时送料机构3前倾,由于行走轮10是在支架5上的轨道槽2内转动,故轨道凹槽与行走轮10之间存在间隙,当送料机构3前倾时,前方的第一转动轮12与轨道槽2的下底面接触,后方的第二转动轮14与轨道槽2的上顶面接触,此时第一转动轮12和第二转动轮14对整个送料机构3的力相反,故形成自锁的效果,送料机构3停止移动,此种设计的优点在于当第一支撑板11托起拱架9没有回缩结束时,整个结构并不稳定,拱架9可能会从第一支撑板11上掉下来,因此此时的送料机构3并不适合移动,只有当拱架9完全被第一支撑板11放置在送料机构3上时,拱架9重心与送料机构3的重心重合,此时送料机构3在移动时才不会使拱架9在第一支撑板11上掉下来,而二者重心重合后,送料机构3整体回正,第一转动轮12和第二转动轮14与轨道槽2的下底面接触,两个轮对送料机构3的力方向相同,结束自锁,送料机构3开始移动,此种设计是利用重心前移和后移实现了送料机构3的自锁,只有当拱架9与送料机构3重心重合时,才会行走,相比于安装传感器检测拱架9落到送料机构3上,然后再启动第二驱动装置16去控制送料机构3的方式相比,结构简单,使用的零部件较少,而且成本较低。
24.如图6及图3所示,一种自动升降拱架台车,包括上述任一项运输机构,所述运输机构设置在支架5一端,所述支架5另一端滑动连接有第二支撑板1,所述第二支撑板1在支架5顶部和底部之间滑动,所述支架5底部设有驱动轮6,所述驱动轮6可带动支架5在隧道8内移动。
25.如图7所示,所述第二支撑板1侧面设有第三支撑板7,所述第三支撑板7可相对第二支撑板1收缩或伸长,所述第二支撑板1上安装有第三驱动装置21,所述第三驱动装置21可带动第三支撑板7收缩或伸长,图8为第一支撑板1相对支架5滑动至底部后的状态参考图,此时第三支撑板7收缩,适应隧道内径的变化,优选的,所述第三驱动装置21为液压伸缩缸或者伸缩气缸。
26.综上所述仅为本发明较佳的实施例,并非用来限定本发明的实施范围。即凡依本发明申请专利范围的内容所作的等效变化及修饰,皆应属于本发明的技术范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1