高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法
1.本发明涉及一种高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法,适用于煤矿井下使用。
背景技术:
2.当前煤矿高应力软岩巷道主要采用重型金属支架、钢管混凝土等被动支护或多层次锚喷网索注、锚架喷注等联合支护,但高应力软岩巷道围岩易渗水泥化膨胀,锚固结构易失效,巷道初期变形剧烈、长期流变、破坏严重、前掘后修、频繁返修,投入成本高,维护效果差,工人劳动强度大,高应力软岩巷道长期稳定性控制极其困难,严重制约了矿井安全高效生产。
3.采用围岩卸压方法,将高应力软岩巷道围岩浅部高应力向深部转移,改善围岩应力环境是高应力软岩巷道围岩控制的有效手段。目前高应力软岩巷道主要采用切槽、大直径钻孔卸压(钻孔直径约90~120mm),但是软岩大直径钻孔成孔率低、成孔困难。由于煤矿高应力软岩巷道轴线距离较长,一般几百米至数千米不等,巷道轴向或径向施工切槽、卸压钻孔数量众多。然而由于切槽、大直径钻孔构建的有效卸压空间小,围岩应力转移效果不明显,切槽或钻孔空间吸收补偿围岩体积膨胀变形效果差,无法有效改善围岩应力环境。此外由于切槽、大直径钻孔等卸压方式人为破坏了巷道浅部围岩局部结构完整性及承载能力,也进一步增加了围岩支护难度。传统切槽、大直径钻孔等卸压方式工程量巨大,工人劳动强度高,也不利于矿井安全高效生产和减员增效提质。
4.若在高应力软岩大巷周围布置卸压巷,由于卸压巷断面远大于切槽、钻孔等卸压方式断面空间,能够将巷道围岩浅部高应力向深部有效转移,改善围岩应力环境。但是传统钻爆法或综掘法掘进施工卸压巷均增加了工人劳动强度,且施工效率低,进度慢,无法长距离快速构建卸压巷。因此,寻求一种高应力软岩大巷围岩卸压巷智能化长距离快速构建方法,将巷道围岩浅部高应力向深部转移,构建有效卸压巷空间吸收补偿围岩体积膨胀变形,并且不破坏巷道浅部支护围岩结构完整性及承载能力,维护高应力软岩大巷围岩长期稳定性,降低围岩卸压方法施工工人劳动强度,是高应力软岩巷道围岩控制近年来亟待解决的关键技术难题。
技术实现要素:
5.针对现有技术的不足之处,提供一种高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法,通过智能化的顶管机将机头和小口径顶管管节顶入高应力软岩大巷处于应力集中区的岩体内,沿平行于高应力软岩大巷的顶进轴线单次顶进小口径顶管管节形成长距离卸压巷,小口径顶管可回收重复利用。卸压巷的施工将高应力软岩大巷围岩浅部高应力向深部转移,优化围岩应力环境,卸压巷的空间吸收补偿围岩体积膨胀变形,消除或降低因长期应力集中导致的大巷围岩流变现象,显著降低高应力软岩大巷变形量,并且不破坏巷道浅部支护围岩结构完整性及承载能力,维护高应力软岩大巷围岩长期稳定性,有效避免
高应力软岩大巷返修或减少返修次数,显著降低工人劳动强度和巷道维护综合成本,确保矿井安全高效生产。
6.为实现上述目的,本发明一种高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法,当在高应力软岩区域施工完成大巷后,在大巷端头垂直帮部向内为l的位置及垂直底板下方围岩做一个断面硐室作为始发硐室,在处于应力集中区的大巷帮部围岩向内距离l的位置及垂直底板下方围岩另一端做一个断面硐室作为接收硐室;利用顶管机机头和多根首尾连接的小口径顶管管节从始发硐室中向接收硐室沿平行于大巷的顶进轴线施工三个卸压巷,分别为位于大巷左侧的左帮围岩长距离卸压巷、位于大巷右侧的右帮围岩长距离卸压巷、位于大巷下方的底板围岩长距离卸压巷。
7.进一步,小口径顶管为多根通过管节承插连接口首尾连接的小口径顶管管节构成,每节小口径顶管管节的侧壁上等间距设有四个出浆口,出浆口上设有注浆传感器,小口径顶管管节内设有与每个出浆口连接的注浆软管,小口径顶管管节直径d为800~2000mm,l距离为8~15m。
8.进一步,卸压巷长距离顶管施工一次顶进长度l为100~1000m;首尾连接的小口径顶管管节之间采用承插式连接,在顶管机机头后侧依次顶进小口径顶管管节形成卸压巷,第一段小口径顶管管节顶进完成后,回退至初始位置,第二节小口径顶管管节与第一节小口径顶管管节承插连接,连接处添加胶合涂层以增加管节的密封性。
9.进一步,所述小口径顶管顶进时端部安装以后顶管机机头,顶管机机头端部设有刀盘,刀盘上设有刀盘传感器和渣浆出浆口,其中渣浆出浆口连接有通过小口径顶管内部延伸的渣浆输送管。
10.高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法的具体步骤如下:
11.s1、完成高应力软岩区域的大巷施工,根据现场测量、数值模拟确定大巷围岩应力集中区位置,在高应力软岩大巷端头垂直帮部向内l为8~15m的位置及垂直底板下方围岩做一个断面硐室作为始发硐室,在处于应力集中区的大巷帮部围岩向内l为8~15m的位置及垂直底板下方围岩另一端做一个断面硐室作为接收硐室,在背向掘进面的一侧搭建一个后支撑墙,依靠该墙的承载力架设顶管机机头;
12.s2、将顶管机机头与小口径顶管进行安装并在始发硐室中吊装定位,利用千斤顶顶进顶管机机头和小口径顶管在顶进过程中不断向小口径顶管外注浆,从而在顶管机机头和小口径顶管外侧形成泥浆套,减小摩擦阻力;
13.s3、在沿平行于高应力软岩大巷的顶进轴线顶进小口径顶管时,小口径顶管山的出浆口随着顶进过程向周围排出慢性润滑剂从而在小口径顶管外侧形成泥浆套,使地层与小口径顶管管节不直接接触,将小口径顶管与周围地层的摩擦力由干摩擦变为湿摩擦,小口径顶管管节与地层的管节—岩体接触变为管—浆液接触,减小摩擦阻力,同时慢性润滑浆液由于其触变性同时起支撑地层的作用,所述慢性润滑剂包括膨润土、羧甲基纤维素、纯碱和水;
14.s4、顶管机机头通过刀盘上设置的刀盘传感器,感知开挖路线刀盘前方的压力;利用注浆传感器采集注浆压力、浆液消耗量;顶管机机头上装备陀螺仪和激光传感器,采集顶管机机头倾斜角度、路线偏移距离信息;
15.s5、注浆传感器、刀盘传感器和智能顶管机千斤顶中的顶推力传感器将工作中收
集到的数据上传至位于工控机的顶管机控制系统,顶管机控制系统根据实时数据确定顶管机机头以及小口径顶管是否处于正常工作状态,若出现偏差则主动进行纠偏;
16.s6、完成左帮围岩长距离卸压巷、右帮围岩长距离卸压巷、底板围岩长距离卸压巷的施工后,回收顶管机机头和小口径顶管管节,重复s1-s6步骤进行下一个卸压巷的施工作业;
17.s7、小口径顶管管节回收后,左帮围岩长距离卸压巷、右帮围岩长距离卸压巷、底板围岩长距离卸压巷形成的空间吸收补偿大巷周围的围岩体积膨胀变形,大巷周围的左帮围岩长距离卸压巷、右帮围岩长距离卸压巷、底板围岩长距离卸压巷将高应力软岩大巷围岩浅部高应力向深部转移,改善围岩应力环境,并且不破坏巷道浅部支护围岩结构完整性及承载能力,维护高应力软岩大巷围岩长期稳定性,有效避免高应力软岩大巷返修或减少返修次数,显著降低工人劳动强度和巷道维护综合成本,确保矿井安全高效生产。
18.进一步,将顶管机机头的各部分:刀盘、刀盘上设置的传感器和姿态感知装置、机头架、主轴承、主大梁、支撑装置、驱动系统、液压装置,以及后配套系统:掘进机液压设备、供电装置、出渣装置、降温防尘系统、导向装置通过计算机模拟建立数学模拟模型,将通过传感器获得的各刀盘压力、顶管机顶进阻力、注浆压力、注浆量、掘进进尺速度、姿态和顶管机行进路线偏移信息作为感知层与训练完成的rbf神经网络模型进行耦合,使封装了训练完成的rbf神经网络模型工控机和plc可编程控制器参与智能顶管机的行为自主判断与自动导向、自动纠偏和掘进过程中异常工况处理。
19.进一步,根据现场测量和数值模拟手段,确定巷道两帮及底板应力集中区,在应力集中的位置施工作为断面硐室的始发硐室和接收硐室,以便后续顶管施工卸压巷工作的开展。
20.有益效果
21.本方法能够快速构建长距离卸压巷,卸压巷施工可以实现远程控制、自主掘进、一次成型,大大提高卸压巷掘进速度,显著降低工人劳动强度。卸压巷施工将高应力软岩大巷围岩浅部高应力向深部转移,卸压巷空间吸收补偿围岩体积膨胀变形,能够实现长距离的连续卸压,显著降低围岩变形量,并且不破坏巷道浅部支护、围岩结构完整性及承载能力,维护高应力软岩大巷围岩长期稳定性,有效避免高应力软岩大巷返修或返修次数,显著降低工人劳动强度和巷道维护综合成本。此外顶管管节可回收重复利用,减少矿方成本投入。
22.本方法采用智能化顶管机,可以自主快速长距离构建高应力软岩大巷围岩卸压巷,卸压巷施工可以实现远程控制、智能掘进、一次成型,施工速度快、劳动强度低,且不破坏巷道浅部支护围岩结构完整性及承载能力,是改善高应力软岩巷道围岩应力环境,构建有效空间吸收补偿围岩体积膨胀变形,维护高应力软岩巷道围岩长期稳定的有效方法。
附图说明
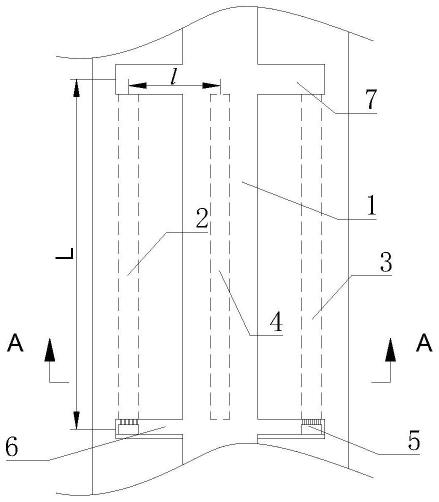
23.图1是本发明高应力软岩大巷围岩卸压巷布置方法平面图;
24.图2是本发明高应力软岩大巷围岩卸压巷布置方法a-a剖面图;
25.图3是本发明高应力软岩大巷围岩卸压巷顶管掘进纵向断面示意图;
26.图4是本发明高应力软岩大巷围岩卸压巷顶管掘进b-b剖面断面示意图;
27.图5为是本发明高应力软岩大巷围岩卸压巷顶管机机头断面图;
28.图6是本发明高应力软岩大巷围岩卸压巷顶管掘进注浆口断面图;
29.图7是本发明高应力软岩大巷围岩卸压巷顶管掘进智能控制系统rbf神经网络结构示意图。
30.图中:1-高应力软岩大巷、2-左帮围岩长距离卸压巷、3-右帮围岩长距离卸压巷、4-底板围岩长距离卸压巷、5-智能顶管机、6-始收硐室、7-接收硐室、8-高应力软岩、9-渣浆出浆口、10-顶管机机头、11-渣浆输送管、12-管节承插连接口、13-出浆口、14-注浆软管、15-小口径顶管管节、16-泥浆套、17-注浆传感器、18-刀盘传感器、19-刀盘
具体实施方式
31.下面结合附图对本发明的实施例做进一步说明:
32.如图1、图2和图3所示,本发明提供一种高应力软岩大巷围岩卸压巷长距离智能化顶管构建方法,包括高应力软岩大巷、左帮围岩长距离卸压巷、右帮围岩长距离卸压巷、底板围岩长距离卸压巷、智能顶管机、始收硐室、接收硐室、高应力软岩、渣浆出浆口、顶管机机头、渣浆输送管、管节承插连接口、出浆口、注浆软管、小口径顶管管节、泥浆套、注浆传感器、刀盘传感器、刀盘。其中,在钢制管节接口处添加胶合涂层增加管节密封性,通过注浆传感器感应润滑剂的消耗状况和注浆压力,通过刀盘上的传感器感知刀盘受力情况,通过千斤顶上的压力传感器等,为智能顶管机决策顶进压力、姿态调整、注浆压力和注浆量提供支撑。
33.由膨润土、cmc(羧甲基纤维素)、纯碱和水调制的慢性润滑剂形成泥浆套将被顶进部分包裹在泥浆套中,变干摩擦为湿摩擦,使小口径顶管管节与地层的管—岩接触变为管—浆接触,起到润滑作用,减小摩阻力。
34.智能化长距离顶管快速构建高应力软岩大巷围岩卸压巷,包括后部智能化顶管机、顶进的小口径顶管管节、接头、注入口、安设的各类传感器。所述智能化顶管机需要在大巷端头垂直帮部向内l为8~15m的位置及垂直底板下方围岩做一个硐室作为始发硐室。顶管机智能掘进控制系统基于采用顶管机施工过程中出现的问题及对策数据库作为训练集,封装了训练完成的rbf神经网络模型工控机和plc可编程控制器,实现智能顶管机的行为自主判断与自动导向、自动纠偏和掘进过程中异常工况。所述管节采用直径d为800~2000mm的钢管,钢制管节间对接采用承插连接,承插处可以添加胶合涂层以保证管节的密封。减小顶推阻力的注润滑液选用膨润土、cmc(羧甲基纤维素)、纯碱和水调制的慢性润滑剂进行注浆,慢性润滑剂的配制应根据现场注浆及顶推力监测情况进行变化。顶进完成后,回收小口径顶管管节,卸压巷施工完成。
35.下面结合附图对本发明的实施过程作进一步的说明:
36.包括以下步骤:
37.s1在高应力软岩大巷1施工完成后,根据现场测量、数值模拟等手段确定高应力软岩大巷1围岩应力集中区,在高应力软岩大巷1端头垂直帮部向内l为8~15m的位置及垂直底板下方围岩做一个断面硐室作为始发硐室6,在处于应力集中区的大巷帮部围岩向内l为8~15m的位置及垂直底板下方围岩另一端做一个断面硐室作为接收硐室7。在背向掘进面的一侧搭建一个具有一定承载力的后支撑墙,依靠该墙的承载力,架设千斤顶等顶进设备。
38.s2将顶管机机头10和后续小口径顶管管节15吊装定位,利用千斤顶顶进顶管机机
头10和后续小口径顶管管节15,在顶进过程中,不断向管外注浆,形成泥浆套16,减小摩擦阻力。
39.首先将顶管设备及器材运输至预先施工完成的始发硐室6位置,在始发硐室6中吊装完成,以单管顶进为基础,将直径d为800~2000mm小口径顶管管节15按照设计的位置采用千斤顶沿平行于大巷1的顶进轴线顶入巷道帮部及底板处于应力集中区的地层8,顶管机机头10根据地层岩石硬度、磨损情况等条件选择相应的刀盘刀具,在顶进路线中可设中继间,卸压巷长度l为100~1000m,后续小口径顶管管节15采用承插式连接,在顶管机机头10后侧依次顶进小口径顶管管节形成卸压巷,第一段钢管顶进完成后,回退至初始位置,第二节钢管与第一节钢管承插连接,连接处可添加胶合涂层以增加管节的密封性,如图4、图5所示,
40.s3在沿平行于高应力软岩大巷1的顶进轴线顶进顶管时,为减少顶进阻力,选择在顶管机机头与后续小口径顶管管节设置润滑剂注入口13,注入膨润土、cmc(羧甲基纤维素)、纯碱和水调制的慢性润滑剂,从而形成泥浆套16,如图6所示,使地层8与小口径顶管管节15不直接接触,将管道与周围地层的摩擦力由干摩擦变为湿摩擦,使小口径顶管管节15与地层8的管—岩接触变为管—浆接触,减小摩擦阻力,同时慢性润滑浆液由于其触变性还能起到支撑地层的作用。
41.s4智能顶管机在刀盘装备刀盘传感器18,可以感知开挖路线刀盘19前方压力;注浆系统装备注浆传感器17,其包括刀盘传感器、浆液流量传感器,可以采集注浆压力、浆液消耗量;顶管机机头10装备陀螺仪和激光传感器,采集顶管机机头倾斜角度、路线偏移距离。
42.s5注浆孔13、刀盘19和后方智能顶管机5上千斤顶的传感器将顶进过程中收集到的数据上传至顶管机控制系统。顶管机控制系统包括基于rbf神经网络模型的智能化控制系统,首先建立针对顶管机施工过程中出现的问题及对策建立大型数据库,将数据库中训练样本经过归一化变换后作为rbf神经网络模型的训练集,利用训练集对rbf神经网络模型进行训练,训练结束后便得到映射关系的网络连接权值,从而使智能化掘进控制系统根据注浆传感器17和刀盘传感器18反馈的信息能够做出报警以及相应的应对措施,当有开挖过程中存在异常工况报警时,把注浆传感器17、刀盘传感器18和千斤顶的顶推力传感器的实际情况与rbf神经网络模型预测情况之差对比,得到每个传感器所在位置变化量,从而对顶管机进行补偿纠偏,确保开挖过程顺利,如图7所示;
43.s6将顶管机机头10的各部分:刀盘及上面的传感器、姿态感知装置、机头架、主轴承、主大梁、支撑装置、驱动系统、液压装置,以及后配套系统:掘进机液压设备、供电装置、出渣装置、降温防尘系统、导向装置建立数学模型,将各下属系统的刀盘压力、顶管机顶进阻力、注浆压力、注浆量、掘进进尺速度、姿态和路线偏移信息作为感知层与训练完成的rbf神经网络模型进行耦合,使封装了训练完成的rbf神经网络模型工控机和plc可编程控制器参与智能顶管机的行为自主判断与自动导向、自动纠偏和掘进过程中异常工况。
44.s7顶管机机头的姿态感知装置主要包括激光光源、光靶、激光传感器、陀螺仪。在始发硐室的特定基点设置一激光光源,使激光束沿既定路线入射到设置在顶管机机头的光靶上,以此监测顶管机机头相对于既定顶进路线的偏差;此外,通过在顶管装备在顶管机机头中的陀螺仪可以得到顶管机机头相对于既定顶进路线的俯仰角、水平摆角和回转角。陀
螺仪和激光传感器信号经过顶管机机头内plc可编程控制器送到工控机中,工控机将目前顶管机机头姿态与模型预测得到的正常机头姿态做对比,得出目前顶管机机头姿态的工况是否异常。
45.s8自动纠偏控制和顶推力调节的实现是通过姿态感知装置和顶推力感知装置得到顶管机的机头目前姿态和顶推力传送给工控机,工控机将目前机头姿态和顶推力大小与模型预测得到的正常机头姿态和顶推力大小做对比,从而得到纠偏油缸伸缩量和顶推力大小,将该伸缩量信息和顶推力大小传送送给plc可编程控制器,通过plc可编程控制器实现对纠偏油缸的伸缩实现对顶管机机头姿态和顶推力的调节。
46.s9顶进阻力异常情况下调节的实现是通过顶推力感知装置和注浆压力传感器及注浆装置得到顶管机的目前顶推力大小、注浆压力和注浆量传送给工控机,工控机将目前顶推力大小、注浆压力和注浆量与模型预测得到的正常目前顶推力大小、注浆压力和注浆量做对比,从而得到顶推力调节量和注浆压力和注浆量的调节量,将顶推力调节量和注浆压力和注浆量的调节量传送送给plc可编程控制器,通过plc可编程控制器实现对顶推力调节和注浆压力和注浆量的调节。
47.s10按照上述方法依次顶进直径d为800~2000mm小口径顶管管节15直至顶至所需位置。待顶管机机头回收之后,移动顶管机等设备,按照上述步骤进行下一个卸压巷的施工作业,待所有卸压巷2、3、4按照预定计划施工完毕后回收顶进设备和卸压巷2、3、4内的小口径顶管管节15。
48.s11小口径顶管管节15回收后,卸压巷2、3、4空间吸收补偿围岩体积膨胀变形。卸压巷将高应力软岩大巷围岩浅部高应力向深部转移,改善围岩应力环境,并且不破坏巷道浅部支护围岩结构完整性及承载能力,维护高应力软岩大巷围岩长期稳定性,有效避免高应力软岩大巷返修或显著减少返修次数,显著降低工人劳动强度和巷道维护综合成本,确保矿井安全高效生产。
49.本发明的保护范围包括但不限于以上实施方式,本发明的保护范围以权利要求书为准,任何对本技术做出的本领域的技术人员容易想到的替换、变形、改进均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1