一种双机械臂与四钻机协作钻锚机器人及其作业方法
1.本发明涉及机械领域,具体涉及一种双机械臂与四钻机协作钻锚机器人及其作业方法。
背景技术:
2.当今矿业研究的热点和难点是具有智能化的快速的井下快速钻锚支护设备。目前,井下支护作业自动化程度低,仍需大量人工辅助完成,安全性低,严重制约了掘进速度的提升,难以满足日益增长的煤矿掘进与综采接替连续高效化作业的需求。
技术实现要素:
3.为解决上述问题,本发明提供了一种双机械臂与四钻机协作钻锚机器人及其作业方法,可自动完成上下钻杆、安装药卷及锚杆、打钻支护等动作,能够在最短的工时,完成钻锚作业,提高钻锚效率。
4.为实现上述目的,本发明采取的技术方案为:
5.顶锚网机构采用镂空井字形结构,通过液压油缸安装于工作平台的前端,用于实现顶部锚网对顶板的压紧贴合,且进行过强度校核,满足所需强度;
6.侧帮护板通过液压油缸对称安装于工作平台前端的两侧,与顶锚网机构处于同一截面内,用于实现侧帮锚网对侧帮的压紧贴合;
7.所述自动打钻机构包括顶板钻机机构和侧帮钻机机构,分两排安装于工作平台上;
8.顶板钻机机构包括横向导轨、钻机机架、旋转机构、顶板钻机;顶板钻机机构通过横向导轨安装在工作平台上,钻机机架通过液压油缸安装在横向导轨上,液压油缸带动顶板钻机左右滑动,顶板钻机通过旋转机构安装在钻机机架上,旋转机构带动顶板钻机上下滑动以及旋转运动;
9.侧帮钻机机构包括横向导轨、钻机机架、旋转机构、侧帮钻机;侧帮钻机机构通过横向导轨安装在工作平台上,钻机机架通过液压油缸安装在横向导轨上,液压油缸带动侧帮钻机左右滑动,侧帮钻机通过旋转机构安装在钻机机架上,旋转机构带动侧帮钻机上下滑动以及旋转运动,从而带动侧帮钻机绕旋转中心旋转,以完成水平方向的打钻作业;
10.所述锚杆和钻杆转运机构包括两台机械臂、自旋转式锚杆药卷库及钻杆库;
11.两台机械臂安装在工作平台上,位于顶板钻机机构和侧帮钻机机构之间,且两机械臂处于同一截面上;自旋转式锚杆药卷库通过螺栓安装在工作平台上,处于两台机械臂的两侧,与机械臂处于同一截面;钻杆库集成在自旋转式锚杆药卷库上。
12.进一步地,所述工作平台上不同位置开设有螺栓孔,可根据实际情况调整机械臂、自旋转式锚杆药卷库及钻杆库的安装位置。
13.进一步地,所述自旋转式锚杆药卷库内的药卷及锚杆交错布放,方便机械臂抓取。
14.进一步地,所述钻杆库集成在自旋转式锚杆药卷库两侧,钻杆数量与钻机数量对
应,可根据钻机数量调整安装的钻杆数量。
15.本发明还提供了上述一种双机械臂与四钻机协作钻锚机器人的作业方法,当开始钻锚作业时,机械臂夹取钻杆安装至与机械臂配合的钻机(包括与左侧机械臂配合的钻机为:左侧的一台顶板钻机及一台侧帮钻机;与右侧机械臂配合的钻机为:右侧的一台顶板钻机及一台侧帮钻机)上,钻机完成钻孔作业后由机械臂将钻杆取下并放置钻杆库内,然后由机械臂夹取药卷安装至钻孔内,其后由机械臂将锚杆由自旋转式锚杆库内取出并安装在与机械臂配合的钻机上,由钻机完成锚杆支护作业,一个孔位的任务完成后,钻机移至下一孔位,重复上述步骤直至完成所有空位的钻锚作业。
16.进一步地,每台机械臂服务于同一侧的两台钻机,即同一侧的一台顶板钻机及一台侧帮钻机,两机械臂工作时互不干涉。
17.本发明具有以下有益效果:
18.本发明的双机械臂与四钻机协作钻锚机器人可自动完成上下钻杆、安装药卷及锚杆、打钻支护等动作,提高了钻锚效率;
19.该钻锚机器人能够与智能掘进机器人系统协同作业,提高掘进效率,并且具有自主行走、精确定位、远程控制等功能。
20.本发明的双机械臂与四钻机协作钻锚机器人同样适用单机械臂双钻机、三机械臂六钻机等工况。
附图说明
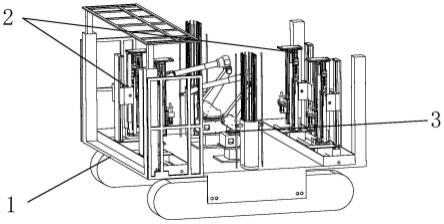
21.图1为本发明实施例一种双机械臂与四钻机协作钻锚机器人的整体结构示意图。
22.图2为本发明实施例中机器人机体的结构示意图。
23.图3为本发明实施例中顶板与侧帮钻机机构的结构示意图。
24.图4为本发明实施例中锚杆及钻杆转运机构的结构示意图。
25.图5为本发明工艺流程图。
具体实施方式
26.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
27.如图1-图4所示,本发明实施例提供了一种双机械臂与四钻机协作钻锚机器人,包括机器人机体1、自动打钻机构2及锚杆和钻杆转运机构3;所述机器人机体1包括工作平台101、履带行走机构102、顶锚网机构103、侧帮护板104;
28.履带行走机构102安装于工作平台101的最底端,左、右两侧各一个,用于为机器人提供行驶动力:
29.顶锚网机构102采用镂空井字形结构,通过液压油缸安装于工作平台101的前端,可实现顶部锚网对顶板的压紧贴合,且进行过强度校核,满足所需强度;
30.侧帮护板104通过液压油缸安装于工作平台101的两侧,位于工作平台的前端,与顶锚网机构102处于同一截面内,可实现侧帮锚网对侧帮的压紧贴合;
31.所述自动打钻机构2包括顶板钻机机构和侧帮钻机机构,分两排安装于机器人工作平台上,每排各安装两台钻机;
32.顶板钻机机构包括横向导轨211、钻机机架212、旋转机构213、顶板钻机214;顶板钻机机构21通过横向导轨211安装在机器人工作平台上,钻机机架212通过液压油缸安装在横向导轨211上,液压油缸可带动顶板钻机左右滑动,顶板钻机214通过旋转机构213安装在钻机机架212上,可带动顶板钻机上下滑动以及旋转运动。
33.侧帮钻机机构22包括横向导轨221、钻机机架222、旋转机构223、侧帮钻机224;侧帮钻机机构22通过横向导轨221安装在机器人工作平台上,钻机机架222通过液压油缸安装在横向导轨221上,液压油缸可带动侧帮钻机左右滑动,侧帮钻机224通过旋转机构223安装在钻机机架222上,可带动侧帮钻机上下滑动以及旋转运动,用于带动侧帮钻机224绕旋转中心旋转,以完成水平方向的打钻作业。
34.所述锚杆和钻杆转运机构3包括两台机械臂31、自旋转式锚杆药卷库32及钻杆库33:
35.两台机械臂31安装在工作平台101上,处于顶板钻机机构与侧帮钻机机构之间,且两机械臂处于同一截面上;自旋转式锚杆药卷库32通过螺栓安装在工作平台101上,处于两台机械臂31的两侧,与机械臂处于同一截面;钻杆库33集成在自旋转式锚杆药卷库32上;
36.在本实施实例中,所述工作平台101上不同位置开设有螺栓孔,可根据实际情况调整机械臂31、自旋转式锚杆药卷库32及钻杆库33的安装位置。
37.在本实施实例中,所述自旋转式锚杆药卷库32内药卷及锚杆交错布放,方便机械臂抓取,每台机械臂服务于同一侧的两台钻机,即同一侧的一台顶板钻机及一台侧帮钻机,两机械臂工作时互不干涉。
38.在本实施实例中,所述钻杆库33集成在自旋转式锚杆药卷库32两侧,钻杆数量与钻机数量对应,可根据钻机数量调整安装的钻杆数量。
39.在本实施实例中,当开始钻锚作业时,机械臂31夹取钻杆安装至与机械臂配合的钻机(包括与左侧机械臂配合的钻机为:左侧的一台顶板钻机及一台侧帮钻机;与右侧机械臂配合的钻机为:右侧的一台顶板钻机及一台侧帮钻机)上,钻机完成钻孔作业后由机械臂将钻杆取下并放置钻杆库内,然后由机械臂夹取药卷安装至钻孔内,其后由机械臂将锚杆由自旋转式锚杆库内取出并安装在钻机上,由钻机完成锚杆支护作业,一个孔位的任务完成后,钻机移至下一孔位,重复上述步骤直至完成所有空位的钻锚作业。
40.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1