一种石油自动化修井井口装置的制作方法
1.本实用新型涉及一种石油自动化修井井口装置,属于石油自动化修井设备技术领域。
背景技术:
2.目前在石油自动化修井设备技术领域,部分设备已经将动力(气动、液压)卡瓦、液压动力钳、吊卡实现了自动化控制,将工人从修井作业繁重的体力劳动中解脱出来。石油修井设备工作时,吊卡的上下工作中心位置需要与动力卡瓦、液压动力钳重合,不能有太大的偏差,否则修井设备无法自动化运行。
3.目前部分石油修井设备的吊卡采用井架导向方式控制其下部位置,井架导向容易受到如风力大小、地基下陷等外部环境影响,不能控制吊卡保持在相对固定位置,每一口油井修井井架的倾斜角度都要根据现场作业的实际情况调整,随之吊卡导向也要做调整。综上,目前吊卡采用的导向方式无法保证自动化修井的顺利实施。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本实用新型提供了一种新的石油自动化修井井口装置,可保证吊卡的下部位置与动力卡瓦、液压动力钳中心位置相对可控,从而保证自动化修井的顺利实施。
5.本实用新型是通过如下技术方案来实现的:一种石油自动化修井井口装置,包括井口作业平台,井口作业平台上设置有动力卡瓦、液压动力钳,其特征是:在井口作业平台上部固定设置有多个吊卡导向装置,所述吊卡导向装置沿井口作业平台上的动力卡瓦的外周围布置,所述吊卡导向装置包括位于下部的支撑结构和设置在支撑结构上部的导向部,所述导向部向外侧倾斜,所有导向部均布置在与井口同心的同一圆周上,所述导向部位于液压动力钳的上方。
6.本实用新型中,吊卡导向装置用于为石油修井设备的吊卡进行导向,石油修井设备的吊卡外部设置有可与吊卡导向装置配合的倒圆锥体状的吊卡导向。当吊卡下降至井口处的吊卡导向装置上方,吊卡继续下降进入吊卡导向装置,通过吊卡导向装置使得吊卡中心与井口中心的偏差变小,此时由于吊卡与吊卡导向装置相互配合,吊卡不易受风力等外部环境因素的影响,能够保证吊卡中心与动力卡瓦、液压动力钳中心保持一致,保证自动化修井的顺利实施。
7.进一步的,为保证与吊卡导向的配合,所述导向部的导向面为平面或圆锥弧面。
8.进一步的,所述吊卡导向装置为间隔设置的3-6个。
9.进一步的,为便于对井口作业平台高度进行调整,在井口作业平台下部设置有井口作业平台高度调整机构。
10.本实用新型的有益效果是:本实用新型结构设计合理,通过在井口作业平台上部设置吊卡导向装置,可保证吊卡在接近油管时通过吊卡导向装置的作用,使得吊卡中心与
井口中心的偏差变小,便于吊卡与油管对接,同时通过吊卡与吊卡导向装置的相互配合,吊卡不易受风力等外部环境因素的影响,能够保证自动化修井的顺利实施。
附图说明
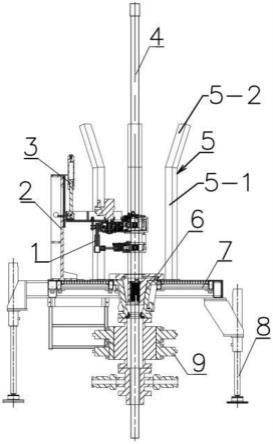
11.图1是本实用新型的结构示意图;
12.图2是图1的俯视图;
13.图3、图4、图5是本实用新型工作时的示意图;
14.图中,1、液压动力钳,2、液压动力钳导向机构,3、液压动力钳升降机构,4、油管,5、吊卡导向装置,5-1、支撑结构,5-2、导向部,6、动力卡瓦,7、井口作业平台,8、井口作业平台高度调整机构,9、防喷器,10、吊卡,10-1、吊卡导向,11、油管取送管机构。
具体实施方式
15.下面通过非限定性的实施例并结合附图对本实用新型作进一步的说明:
16.如附图所示,一种石油自动化修井井口装置,包括井口作业平台7,井口作业平台7上设置有动力卡瓦6、液压动力钳1、液压动力钳导向机构2、液压动力钳升降机构3,动力卡瓦6对应于井口设置,动力卡瓦6下部与防喷器9连接。液压动力钳1设置在动力卡瓦6上方,液压动力钳1与液压动力钳升降机构3连接并可通过液压动力钳升降机构3进行升降,液压动力钳1升降时通过液压动力钳导向机构2进行导向。在井口作业平台7上部还固定设置有多个吊卡导向装置5,所述吊卡导向装置5沿井口作业平台7上的动力卡瓦6的外周围布置。所述吊卡导向装置5包括位于下部的支撑结构5-1和固定设置在支撑结构5-1上部的导向部5-2,所述导向部5-2向外侧倾斜,所有吊卡导向装置5的导向部5-2均布置在与井口同心的同一圆周上,且所述导向部5-2位于液压动力钳1的上方。
17.为保证与吊卡导向的配合,本实施例中,所述导向部的导向面为平面或圆锥弧面。
18.为保证吊卡导向装置5的导向作用及便于操作人员进出,优选的是,所述吊卡导向装置5为间隔设置的3-6个。通过吊卡导向装置5之间的间隙,操作人员可进入内部进行动力卡瓦及液压动力钳等的安装及维修。
19.为便于对井口作业平台7高度进行调整,在井口作业平台7下部设置有井口作业平台高度调整机构8,井口作业平台高度调整机构8可以采用液压缸等可进行高度调整的机构。
20.本实用新型中的动力卡瓦6、液压动力钳1、防喷器9均为现有技术,动力卡瓦6可以为现有技术中的气动卡瓦或液压卡瓦。本实用新型工作时与通井机的吊卡10配合工作,通井机的吊卡10外部设置有倒圆锥体结构的吊卡导向10-1,吊卡导向10-1可与井口作业平台7上的吊卡导向装置5的导向部5-2配合。
21.下面通过具体的动作描述对石油自动化修井井口装置作出进一步说明:从油井中起油管:
22.1、各部件起油管开始状态:
23.1)动力卡瓦6闭合(将油管锁定)
24.2)液压动力钳1处于最下位状态
25.3)吊卡10打开,处于油管上方
26.4)油管上部处于指定位置
27.2、动作过程:
28.吊卡10打开,通井机通过钢丝绳带动吊卡10下降,由于外部环境影响,吊卡10在下降的过程中,吊卡中心与井口中心存在一定偏差,吊卡10下降至井口吊卡导向装置5上部,吊卡10继续下降并通过吊卡导向装置5进行导向,吊卡中心与井口中心的偏差变小至允许范围,吊卡10下降到指定位置,吊卡10闭合,通井机通过钢丝绳带动吊卡10向上移动,同时动力卡瓦6打开,液压动力钳1半闭,吊卡10带动油管继续向上移动,油管接箍露出带动液压动力钳1向上移动至指定位置停止;动力卡瓦6闭合,锁定油管,液压动力钳1完全闭合拆卸油管,油管拆卸完毕后完全打开下降到设定最下位置,油管取送管机构11处于竖直状态将油管抓住固定,吊卡10打开向上移动与油管脱离,油管取管机构11将油管取走;至此完成一根油管的起管作业,吊卡10下降准备取下一根油管,如此往复完成油管的起管作业。
29.往油井中下油管:
30.1、各部件下油管开始状态:
31.1)动力卡瓦6闭合(将油管锁定)
32.2)液压动力钳1处于最上位打开状态
33.3)吊卡10打开,处于最上方
34.4)井中已下油管上部处于指定位置
35.2、动作过程:
36.油管取送管机构11将油管送至井口中心上部位置,吊卡10(打开状态)下降,油管进入吊卡10,吊卡10感应到油管进入到指定位置后关闭,油管取送管机构11移开,吊卡10带动油管下降至指定位置,液压动力钳1闭合拧紧油管后完全打开下降到最下端位置,动力卡瓦6打开,吊卡10带动油管下降到设定位置,动力卡瓦6闭合,吊卡10打开上升到最高位置,至此完成一根油管的下管作业;等待油管取送管机构11将油管送至井口中心上部位置,如此往复,完成油管的下管作业。
37.本实施例中的其他部分均为现有技术,在此不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1