一种基于模糊神经网络的自动射孔系统
本发明涉及地质工程的井下射孔领域,具体涉及一种基于模糊神经网络的自动射孔系统。
背景技术:
1、射孔器是一种用于油气井射孔的器材(或装置)及其配套件的组合体,按照射孔器传输方式可以分为电缆传输式射孔与油管传输式射孔。油管传输式射孔相较于电缆传输式射孔具有很多优点:(1)可以按照目的层压力与岩性特点设计负压,减少射孔孔眼杵堵,提高产能;(2)输送能力强,可一次实施长井段射孔;(3)可以使用高性能射孔器;(4)适用于高压油气井;(5)能进行大斜度井和水平井射孔;(6)可以与地层测试联合作业。凭借这些突出优点,油管传输式射孔已得到了广泛的应用。
2、油管传输式射孔现场工作步骤如下:(1)了解施工井的情况,分配各岗施工任务;(2)装配射孔器;(3)井口连接射孔器,将所有射孔器身依次连接好,下入井内;(4)射孔器下入完毕后连接起爆装置;(5)作业队下放带有射孔器的油管柱;(6)射孔小队校深定位;(7)调整油管管柱,调整后射孔。在射孔器向井下探测的过程中,射孔器材通过自身携带的传感器不断获得井下ccl(磁性定位)信号序列,该信号序列在井下接箍处与非接箍处呈现出不同的特征,因此可以通过ccl信号序列的特征判断射孔器是否经过井内接箍处,进而判断无线射孔器材当前的位置。
3、射孔小队校深定位时需要观测工作人员实时观测对比地下返回的ccl信号曲线(使用ccl信号序列绘制成的平面曲线),整个过程连续不间断,因此校深定位时通常需要多人轮流观测对比曲线,整个过程繁琐机械,并且判断准确率依靠工作人员经验决定。如果可以实现一种无需人工校准并且识别ccl信号序列准确率高的自动射控系统,将会极大增加射孔作业的可靠性,减轻射孔作业工作人员的负担。
技术实现思路
1、针对上述存在的问题和不足,为解决传统射孔作业中识别ccl信号序列准确率依靠作业人员经验,射孔工作人员负担高,可靠性相对不足的问题,本发明引入人工智能技术,提供了一种基于模糊神经网络的自动射孔系统。
2、具体技术方案如下:
3、一种基于模糊神经网络的自动射孔系统,其架构包括ccl传感器、ccl滤波器、智能识别单元、控制单元、火工品单元、电源和头部保护单元。
4、所述ccl传感器通过自身携带的线圈,在施工井内下降过程中切割地磁感线,从而产生电信号,实时探测施工井内的ccl信号序列并将探测得到的ccl信号序列传输至ccl滤波器。
5、所述ccl滤波器通过自身滤波逻辑,将接收的ccl信号序列的毛刺与噪声去除,得到平滑的ccl信号序列,并输出至智能识别单元。
6、所述智能识别单元,其内部保存有已经训练完成的模糊神经网络的结构参数,用于判断ccl滤波器输入的平滑ccl信号序列是否是通过接箍时的序列。智能识别单元将接收到的平滑的ccl信号序列作为模糊神经网络的输入,模糊神经网络基于自身前向推理逻辑输出判断输入的ccl信号序列是否是通过接箍而产生的信号序列的电信号。该模糊神经网络结构具体如下:
7、第一层为输入层,用于将外部输入的ccl信号序列接入模糊神经网络。设输入的ccl信号序列为向量x,x的维度为n,即x=[x1x2x3…xn]t(t为转置运算符号)。第一层的节点数为n。
8、第二层为分割层,用于将输入向量x等量分割为维度为m的分量(m即第二层中每个节点的模糊分量数),一共分割为p个子集,其中若n不能被m整除,则在输入向量的最前端和最后段添加0,使得输入向量的维度可以被m整除,从而第二层的维度变为n。第二层的节点数为n,并且
9、第三层为模糊化层,用于将分割层中的每个节点映射到模糊语言值上。对于分割层中的每一个节点xi,都有为节点xi在其第si个模糊语言值上的隶属度,是节点xi的第si个隶属函数(如高斯函数、s型函数)。第三层节点数为n*m。
10、第四层为模糊规则强度层,用于进行模糊规则强度的叠加,每个规则强度节点都有其中,为第四层的每个规则强度节点。第四层的节点数为p*m。
11、第五层为全连接层,用于将每个子集p的模糊规则强度与识别分类数联系在一起。该层的每个节点都有其中,yo为全连接层每个节点的输出,为全连接层的权重,r为识别的分类数。
12、第六层为概率层,用于输出输入的ccl信号序列对应在每个种类的概率。该层的每个节点都有其中po为对应输入序列在第o个类别的概率。
13、所述控制单元接收来自智能识别单元的判断信号,进行逻辑控制。控制单元依靠射孔作业之前所确定的需要进行射孔的节点位置,以及施工井内所有接箍的位置,判断当前射孔器的位置坐标。如果判断当前已经到达某一个需要射孔的节点位置,则向火工品单元发出进行射孔的电信号。
14、所述火工品单元,用于对井下目标位置进行射孔。当火工品单元接收到来自控制单元需要进行射孔的电信号时,便进行一次射孔。
15、所述电源与所有需要供电的组件连接,用于给整个系统进行供电。
16、所述头部保护单元,用于保护整个自动射孔系统。
17、基于模糊神经网络的自动射孔系统,其工作流程包括准备阶段与执行阶段;
18、准备阶段工作步骤如下:
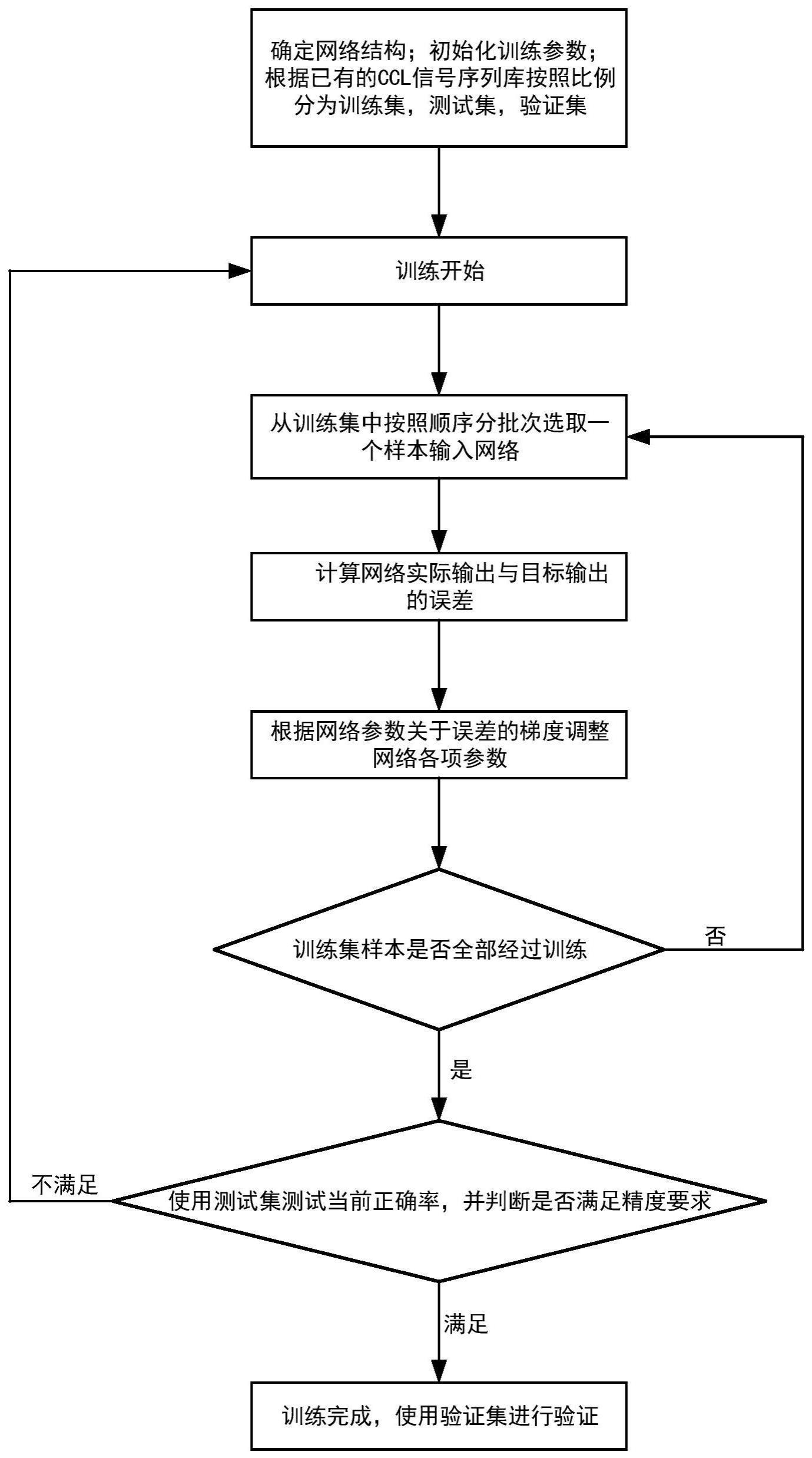
19、步骤1、初始化训练条件,包括:(1)确定网络结构,包括输入序列维度、输入序列分割数、每个输入元素的模糊语言数、隶属函数类型和输出类别数。(2)根据已有的ccl信号序列库,将其按照比例分为训练集、测试集和验证集。(3)确定学习率=、损失函数>和每次训练时的批数(batch_size)。
20、步骤2、训练模糊神经网络,具体步骤为:(1)训练开始。(2)按照初始化训练条件时的batch_size从训练集中按照顺序分批次选取一个样本输入网络。(3)计算网络实际输出与期望输出的误差。(4)根据参数关于误差的梯度调整网络各项参数。(5)判断训练集样本是否全部经过训练。如果训练集样本没有全部经过训练,则回到步骤(2)继续从训练集选择新的样本;如果训练集样本全部经过训练,则使用测试集测试当前正确率,如果当前正确率满足精度要求,则训练完成;如果当前正确率不满足精度要求,则回到步骤(1),直至当前正确率满足精度要求。
21、其中,训练参数的调整具体如下:
22、使用梯度下降算法训练模糊神经网络的参数,定义损失函数>,对于全连接层的权重有其中
23、隶属函数中的训练参数有其中
24、根据梯度下降算法,与的表达式,可以得到各参数迭代公式:
25、
26、其中是更新后的权重参数,是更新前的权重参数,=是学习率,v为时间。
27、
28、其中是更新后的隶属函数参数,是更新前的隶属函数参数。
29、步骤3、将训练好的模糊神经网络结构参数存入系统的智能识别单元。
30、步骤4、将所有需要射孔的节点位置和井内所有接箍的位置存入系统的控制单元。
31、执行阶段工作步骤如下:
32、步骤1、控制单元判断所有需要射孔的节点是否已经全覆盖,如果已经全部覆盖,则任务完成;如果没有全部覆盖,则继续下放射孔器。
33、步骤2、射孔器持续下放过程中,通过ccl传感器实时得到ccl信号序列,该序列经过ccl滤波器得到平滑的ccl信号序列,平滑的ccl信号序列被实时输入智能识别单元,智能识别单元判断之后向控制单元发送判断结果。
34、步骤3、控制单元接收智能识别单元的判断电信号。控制单元如果接收到是接箍的电信号,则根据接箍位置判断当前射孔器的位置。如果到达需要射孔的节点位置之一,则向火工品单元发送需要进行射控的电信号,如果没有到达目标位置之一,则跳回至步骤2;控制单元如果接收得到不是接箍的电信号,则跳转至步骤2。
35、步骤4、火工品单元接收到进行射孔的电信号后,进行射孔,之后跳转至步骤1。
36、本发明通过引入人工智能技术,根据射孔器的工作场景与模糊神经网络结合,依据实时探测的ccl信号序列通过模糊神经网络进行自动化的精准接箍点判定。该系统整体工作流程包括准备阶段和工作阶段。在准备阶段,在现有ccl信号序列数据库的基础上,利用梯度下降算法训练模糊神经网络,得到网络参数并存入系统的智能识别单元。在工作阶段,以结构简单,训练方便,正确率高的智能识别单元为核心的自动射孔系统,实现了不依靠人工经验,自动识别ccl信号序列,判断射孔器当前位置,根据目标位置坐标进行自动射孔作业的功能。该自动射孔系统解决了传统射孔作业中工作人员负担重,可靠性不足的问题。
- 还没有人留言评论。精彩留言会获得点赞!