一种多风机联合运转干扰下采空区漏风的智能调控方法
本发明涉及煤炭开采,具体涉及一种多风机联合运转干扰下采空区漏风的智能调控方法。
背景技术:
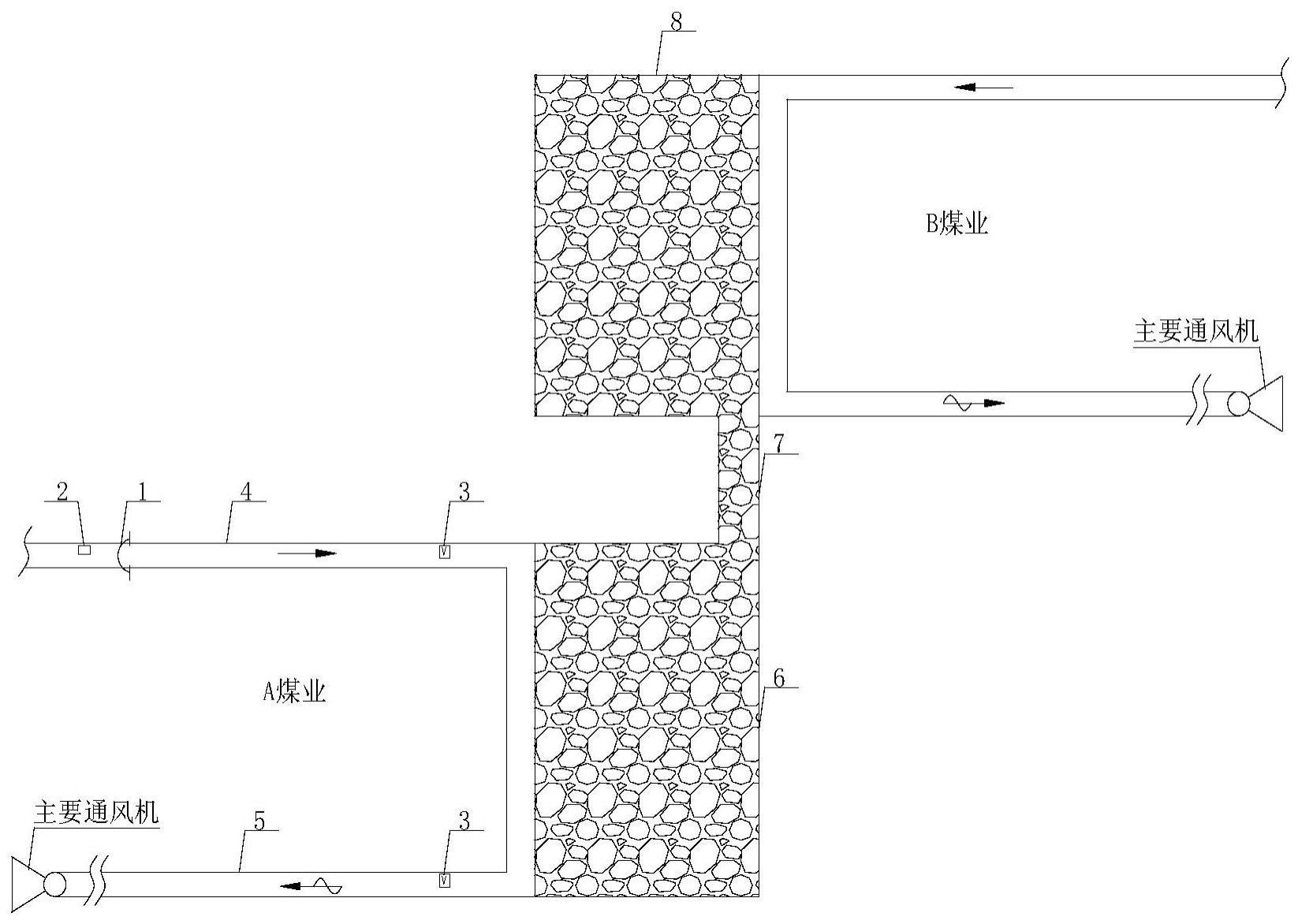
1、由于原来矿井开采时存在私挖乱采和不规范性等现象,造成资源整合后的矿井采空区相互连通。当相邻矿井开采同一煤层的邻近工作面时,由于其上覆近距离煤层开采已形成大面积的采空区,随着该层工作面的开采和后方顶板的垮落,导致现采空区与上覆煤层采空区连通;同时受多风机负压联合干扰影响,导致相邻矿井采空区之间存在压能差。由于此压能差的存在极易造成工作面风量流向采空区,形成采空区漏风,导致通风系统不稳定、工作面风量不足、采空区遗煤自燃、回风隅角瓦斯容易积聚等现象,给矿井安全生产带来隐患。
2、目前治理采空区漏风常采用的方法有:①注浆堵漏:浆液注入或者直接喷洒在采空区内,浆液能够渗透到煤和矸石的缝隙中,缩小煤与氧气接触的反应面,降低采空区内的孔隙率,增强碎煤和矸石的胶结性,提供区域内的气密性,从而减少采空区的漏风。②高分子材料填充:向回风隅角采空区漏风通道或工作面液压支架后新形成采空区漏风通道注入高分子材料,使其与产生裂隙的煤岩体紧密结合,达到减少漏风效果。③挡风墙技术:在进、回风隅角处垒砌墙,中间填砂,有的采用填河沙、黄土等不燃性材料装入编织袋堆砌构筑堵漏风墙,尽量使两个隅角处封严,以减小向采空区漏风。
3、上述几种方法对减少工作面向采空区漏风有一定效果,但需随着工作面的推进及时进行施工,耗费大量的人力物力,智能化程度也低,并且对存在大面积的采空区漏风治理效果不明显,再加上矿井负压受气候条件变化影响较大,在不同的时间段会造成井下采空区漏风量不一样,在多风机联合运转干扰下采空区漏风情况就更加复杂,增加了采空区漏风治理难度。因此提供一种多风机联合运转干扰下采空区漏风的智能调控方法成为必要。
技术实现思路
1、当相邻矿井开采同一煤层的邻近工作面时,由于其上覆近距离煤层开采已形成大面积的采空区,随着该层工作面的开采和后方顶板的垮落,导致现采空区与上覆煤层采空区连通;同时受多风机负压联合干扰影响,导致相邻矿井采空区之间存在漏风现象,为解决此问题本发明提出一种多风机联合运转干扰下采空区漏风的智能调控方法,减少采空区漏风的方法。
2、为实现上述目的,本发明采用如下技术方案:
3、一种多风机联合运转干扰下采空区漏风的智能调控方法,利用传感器实时监测风量、瓦斯浓度,控制箱接收传感器的监测数据并反馈至上位机,上位机实时计算工作面向采空区的实际漏风量,控制箱中的伺服电机控制风窗面积进行调控风量,上位机根据调控后的漏风量做出进一步指令,直到达到设定的漏风量要求,具体步骤如下:
4、步骤1.在采空区漏风区域工作面两侧的进风巷与回风巷安装超声波风速传感器,进风巷安装智能风门-风窗,在智能风门-风窗附近安装配套控制箱;
5、步骤2.上位机根据工作面两侧进风巷与回风巷风量实时计算实际漏风量q实,根据工况要求在上位机中设定工作面漏风量q设,上位机实时计算实际漏风量q实与设定工作面漏风量q设的差值e,以及差值变化率ec,并将差值e和差值变化率ec传输到控制箱中;
6、步骤3.将上位机计算所得的实际漏风量q实与设定工作面漏风量q设的差值e和差值变化率ec作为输入变量传输给控制箱中的变论域模糊pid调控系统;经过变论域模块得出伸缩因子,伸缩因子对初始比例因子和初始量化因子进行调控;经过模糊调节模块得出pid的三个参数ki、kp、kd;将漏风量差值e、差值变化率ec、ki、kp、kd作为pid控制器模块的输入变量,pid控制器模块输出伺服电机的控制信号;
7、步骤4.伺服电机根据接收的控制信号调节风门-风窗过风面积,改变进风量,平衡所监测的采空区与周边采空区之间的压差,直到实际漏风量q实低于或者相等设定漏风量q设;若上位机计算得出漏风量未达到所设定的数值,将重新进入步骤3中开始计算,直到实际漏风量低于或等于设定漏风量。
8、进一步,控制箱为kxj127矿用隔爆兼本安型plc控制箱,在plc控制箱中设置变论域模糊pid调控系统,控制箱的信号接收端连接用于检测风量的超声波风速传感器、采煤工作面回风隅角甲烷传感器t0和两个采煤工作面回风巷甲烷传感器;控制箱的信号输出端连接伺服电机的控制端;控制箱与上位机、伺服电机信号双向传输。
9、进一步,控制箱的变论域模糊pid调控系统包括变论域模块、模糊调节模块和pid控制器模块。
10、进一步,超声波风速传感器设置在采空区漏风工作面的进风巷和回风巷,距离工作面切眼60m开始向采空区方向等间距安装一组用于监测所漏风工作面进风巷和回风巷风量的超声波风速传感器,且进风巷和回风巷两侧的超声波风速传感器的数量均不少于3组。
11、进一步,步骤2中,上位机实时计算实际漏风量q实与设定工作面漏风量q设的差值e与差值变化率ec,计算方法如下:
12、步骤2.1设进风巷超声波风速传感器监测的风量为q进i,表示第i个传感器监测的风量,同理回风巷超声波传感器监测的风量为q回i,进风巷风量为其中n表示传感器的数量,同理计算工作面实际漏风量q实=q进-q回;
13、步骤2.2实际漏风量与设定漏风量差值e=q实-q设,差值变化率
14、进一步,上位机中设定工作面最低需风量,将回风巷风量视为工作面风量,若工作面风量低于工作面最低需风量需重新设定漏风量q设。
15、进一步,变论域模糊pid调控系统具体包括以下内容:
16、s1,设输入变量差值e与差值变化率ec初始论域分别为[-e0,e0]、[-ec0,ec0],输出变量δkp、δki、δkd的初始论域分别为[-kp0,kp0]、[-ki0,ki0]、[-kd0,kd0],并设输入变量差值e与差值变化率ec以及输出变量δkp、δki、δkd的模糊论域均为[-m,m];
17、s2,将实际漏风量q实与设定工作面漏风量q设的差值e与差值变化率ec作为变论域模块的输入变量,采用伸缩因子函数模型得出输入变量差值e的伸缩因子αe、差值变化率ec的伸缩因子αec和三个输出变量δkp、δki、δkd的伸缩因子βp、βi、βd;其中伸缩因子函数模型如下:
18、输入伸缩因子:
19、输出伸缩因子:
20、
21、式中λ∈(0,1),k>0;ki为比例因子;pi为输入权重系数;ei(τ)为输入变量误差;β(0)为输出论域伸缩因子初值;
22、s3,根据s1中所设定的初始论域和模糊论域得出初始量化因子ke0、kec0以及初始比例因子lp0、li0、ld0,即将s2中所得的伸缩因子αe、αec对初始量化因子ke0、kec0进行调整得出量化因子ke与kec,即ke=αe·ke0、kec=αec·kec0;差值e与差值变化率ec作为模糊调节模块输入变量且经过量化因子作用模糊化处理得到模糊量e*与ec*,即e*=ke·e、ec*=kec·ec;参照专家领域知识设置模糊集和模糊规则以及采用重心法对模糊量e*与ec*进行模糊处理得到输出值δkp*、δki*、δkd*;利用所输出变量的伸缩因子βp、βi、βd对初始比例因子进行调节得到比例因子lp、li、ld,即lp=βp·lp0、li=βi·li0、ld=βd·ld0;将输出值δkp*、δki*、δkd*对三个比例因子对应进行比例调节得到参数调整量δkp、δki、δkd,即δkp=δkp*·lp、δki=δki*·li、δkd=δkd*·ld;
23、s4,通过pid控制器参数整定方法得出初始值kp0、ki0、kd0,根据上述得出的调整量δkp、δki、δkd对初始值进行调整,获得pid控制的3个参数kp=kp0+δkp、ki=ki0+δki、kd=kd0+δkd;将差值e与差值变化率ec以及3个参数kp、ki、kd作为pid控制器模块的输入变量,pid控制器模块输出控制信号传输到伺服电机;其中关于pid控制算法的离散化公式为:
24、
25、式中un为调节n次后输出的结果,en为第n次实际漏风量q实与设定漏风量q设差值,ts为调控时间,kp为比例常数、ti积分时间常数、td微分时间常数。
26、进一步,上位机中设定工作面最低需风量,若调节后工作面风量低于最低需风量,重新设定漏风量q设;上位机同时实时监测回风隅角t0与回风巷的瓦斯浓度数据,当瓦斯浓度数据超限时上位机开启气体浓度警告,发出警告指令到控制箱进行语音警告,并控制箱输出控制信号到伺服电机,控制智能风门-风窗开度恢复到最大状态,待瓦斯浓度正常后,根据实时监测的风量,再重新设定漏风量q设并保证瓦斯浓度不再超限,继续进行调节。
27、综上,发明具有以下有益效果:
28、本发明主要能够有效平衡本工作面采空区与周边工作面采空区存在的压能差,降低采空区漏风对通风系统的影响,同时能随时监测工作面两侧进风巷和回风巷风量情况以及采空区漏风情况,并且能够自动调节进风巷风量,有效控制工作面漏风量,利用变论域模糊pid控制方法实现对风窗的优化控制,实现了调整时间短、稳态精度高、稳态误差小、超调量小等优点,实现了采空区漏风量实时智能化调控。
- 还没有人留言评论。精彩留言会获得点赞!