掘进系统及掘进方法与流程
本发明涉及煤矿井下巷道掘进,具体而言,涉及一种掘进系统及掘进方法。
背景技术:
1、目前,在煤矿井下巷道掘进的作业过程中,定位导航系统负责测量和提供各个设备的位姿信息,实现精准定位和智能导航之后,才能实现掘锚机自主定位自动截割、定步距定循环前移、定排距锚护,后配套自动跟随,同时也是整个系统协同控制的基础。对于煤矿井下掘进设备的导航定位,目前国内外一般有下列几种方案:
2、(1)“纯惯导”或“惯导+里程计”:目前在掘进机等设备的导航方案中经常使用单纯以惯导作为导航元件,或者配合以全站仪、里程计等其他形式的传感器。
3、(2)激光雷达:目前国内比较常见的另一种技术方案,是在掘进机上加装激光雷达,激光雷达扫描巷道两个侧帮和后面预先挂置的测距板,通过重构两个侧帮和测距板的点云数据,拟合出两个侧帮的图像,进而反向求解掘进机与两个侧帮的位置关系,再进一步求解出掘进机在巷道内的姿态和位置信息。
4、然而,上述这些方案是针对类似掘进机这种单一设备的定位导航而设计,不适用于掘锚机高效快速掘进系统这种多设备配套作业的工况。对于“惯导+里程计”的方案而言,存在的最大问题是掘进机工作过程中的打滑和横向侧移无法被里程计正确的敏感到,因此在实际应用中存在较大的偏差。对于采用激光雷达的导航方式而言存在以下劣势:粉尘较大的工况,激光雷达采集不到两个侧帮和后面测距板的反光信息,造成测量失效;侧帮煤岩结构不稳定、容易掉落(俗称片帮,这种情况经常出现)的情况下,对两个侧帮的重构会出现错误,造成定位不准确;定位和姿态测量精度低。虽然激光雷达方案是目前国内比较常见的一种方案,但在井下的实用性较差。
技术实现思路
1、本发明的主要目的在于提供一种掘进系统及掘进方法,以解决现有技术中的掘进系统只能对单一设备进行定位导航的技术问题。
2、为了实现上述目的,根据本发明的一个方面,提供了一种掘进系统,包括:
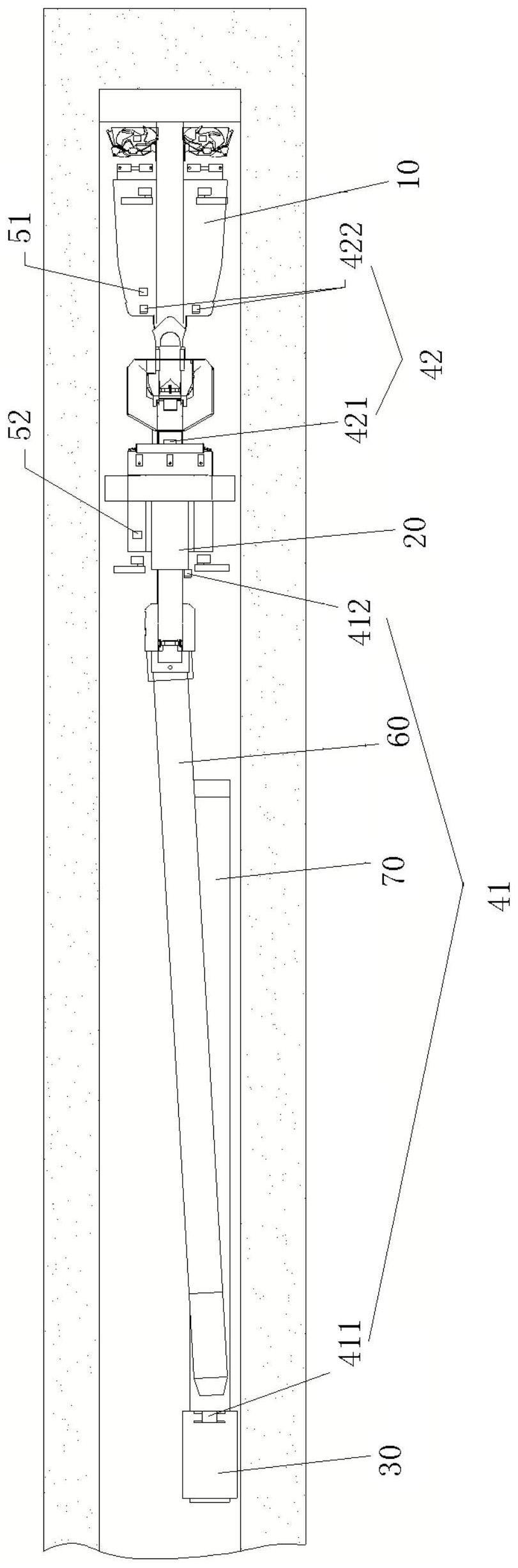
3、掘锚机、锚护转载破碎机和集中控制平台,掘锚机位于锚护转载破碎机的前方,集中控制平台设置在锚护转载破碎机远离掘锚机的一侧;
4、定位导航装置,定位导航装置与集中控制平台信号连接,定位导航装置包括间隔设置的第一定位组件和第二定位组件,第一定位组件用于确定锚护转载破碎机相对于集中控制平台的相对位置,第二定位组件用于确定掘锚机相对于锚护转载破碎机的相对位置;
5、其中,第一定位组件包括第一检测部和第一定位部,第一检测部设置在集中控制平台上,第一定位部设置在锚护转载破碎机上,第一检测部用于检测第一定位部的位置;第二定位组件包括第二检测部和第二定位部,第二检测部设置在锚护转载破碎机上,第二定位部设置在掘锚机上,第二检测部用于检测第二定位部的位置。
6、进一步地,第一检测部为激光跟踪仪,第一定位部为激光标靶,激光跟踪仪设置在集中控制平台靠近锚护转载破碎机的一侧,激光标靶设置在锚护转载破碎机靠近集中控制平台的一侧,激光标靶与激光跟踪仪相对设置,激光跟踪仪用于对激光标靶的位置进行跟踪,以使激光跟踪仪发出的激光投射在激光标靶上。
7、进一步地,第二检测部为工业相机,工业相机设置在锚护转载破碎机靠近掘锚机的一侧,第二定位部为定位光源,定位光源述掘锚机靠近锚护转载破碎机的一侧。
8、进一步地,定位导航装置还包括:
9、第一姿态测量仪,设置在掘锚机上,第一姿态测量仪用于对掘锚机的航向角、掘锚机的横滚角和掘锚机的俯仰角进行测量;和/或,
10、第二姿态测量仪,设置在锚护转载破碎机上,第二姿态测量仪用于对锚护转载破碎机的航向角、锚护转载破碎机的横滚角和锚护转载破碎机的俯仰角进行测量。
11、进一步地,掘锚机上设置有第一钻臂和第二钻臂,第一钻臂设置在掘锚机的顶部,第一钻臂用于进行对巷道的顶板锚杆作业;第二钻臂设置在掘锚机的侧部的上方,第二钻臂用于对巷道的侧部的上方进行锚杆作业;
12、锚护转载破碎机上设置有第三钻臂和第四钻臂,第三钻臂设置在锚护转载破碎机的顶部,第三钻臂用于对巷道的顶板进行锚索作业;第三钻臂设置在锚护转载破碎机的下方,第三钻臂用于对巷道的侧部的下方进行锚杆作业。
13、根据本发明的另一方面,提供了一种掘进方法,采用上述提供的掘进系统,掘进方法包括:
14、利用矿井的地测数据对掘进系统的第一定位组件的第一检测部进行标定,以得到第一检测部的绝对坐标以及巷道的设计中心线绝对坐标,将第一检测部的绝对坐标和巷道的设计中心线的绝对坐标传送至掘进系统的定位导航装置;
15、利用掘进系统的第一定位组件获取掘进系统的锚护转载破碎机的相对位置坐标,并将锚护转载破碎机的相对位置坐标传送至定位导航装置;
16、利用掘进系统的第二姿态测量仪获取锚护转载破碎机的姿态信息,并将锚护转载破碎机的姿态信息传送至定位导航装置;
17、根据第一检测部的绝对坐标、锚护转载破碎机的相对位置坐标、锚护转载破碎机的姿态信息确定锚护转载破碎机的绝对坐标、锚护转载破碎机的姿态角、锚护转载破碎机相对于巷道设计中心线的左右偏离值、锚护转载破碎机相对于巷道设计中心线的上下偏离值以及锚护转载破碎机与巷道设计中心线的夹角。
18、进一步地,掘进方法还包括:
19、利用掘进系统的第二定位组件获取掘进系统的掘锚机的相对位置坐标,并将掘锚机的相对位置坐标传送至定位导航装置;
20、利用掘进系统的第一姿态测量仪获取掘锚机的姿态信息,并将掘锚机的姿态信息传送至定位导航装置;
21、根据第一检测部的绝对坐标、锚护转载破碎机的相对位置坐标、掘锚机的相对位置坐标和掘锚机的姿态信息确定掘锚机的绝对坐标、掘锚机的姿态角、掘锚机相对于巷道设计中心线的左右偏离值、掘锚机相对于巷道设计中心线的上下偏离值以及掘锚机与巷道设计中心线的夹角。
22、进一步地,掘进方法还包括:
23、使掘锚机和锚护转载破碎机采用交替运动的方式进行运动,并利用掘锚机和锚护转载破碎机交替作为定位基准进行定位导航;
24、其中,当掘锚机移动时,锚护转载破碎机的机身不动,以锚护转载破碎机的机身为定位基准对掘锚机进行定位导航;
25、当锚护转载破碎机移动时,掘锚机的机身不动,以掘锚机的机身为定位基准对锚护转载破碎机进行定位导航。
26、进一步地,在利用掘锚机和锚护转载破碎机交替作为定位基准进行定位导航的过程中,掘进方法还包括:
27、每间隔预设时间,对锚护转载破碎机的位姿行标定;和/或,
28、在一个掘进过程结束后,掘进系统的自移机尾移动至下一预定位置时,对第一检测部的绝对坐标进行校准。
29、进一步地,掘进方法还包括:
30、在掘锚机向前移动时,定位导航装置按照预定的频率计算得到掘锚机的位置和姿态角信息,并根据掘锚机的位置和姿态角信息确定掘锚机的移动轨迹,并将掘锚机的移动轨迹与巷道的设计中心线进行对比,以巷道的设计中心线作为纠偏基准对掘锚机的移动进行纠偏。
31、进一步地,确定掘锚机的绝对坐标、掘锚机的姿态角、掘锚机相对于巷道设计中心线的左右偏离值、掘锚机相对于巷道设计中心线的上下偏离值以及掘锚机与巷道设计中心线的夹角后;掘进方法还包括:
32、启动掘锚机,以通过掘锚机对当前工位进行截割作业和锚杆作业;
33、在掘锚机完成对当前工位进行截割作业和锚杆作业后,检测掘锚机与锚护转载破碎机之间的距离是否在预设距离范围内,并检测锚护转载破碎机的机身是否静止;
34、当掘锚机与锚护转载破碎机之间的距离在预设距离范围内,且锚护转载破碎机的机身静止时,控制掘锚机向前移动预设步距,以使掘锚机到达下一工位;
35、当掘锚机与锚护转载破碎机之间的距离不在预设距离范围内,和/或,锚护转载破碎机的机身静止时,先使锚护转载破碎机运动至预设距离范围内,随后控制锚护转载破碎机的机身静止,接着再控制掘锚机向前移动预设步距,以使掘锚机到达下一工位。
36、进一步地,确定锚护转载破碎机的绝对坐标、锚护转载破碎机的姿态角、锚护转载破碎机相对于巷道设计中心线的左右偏离值、锚护转载破碎机相对于巷道设计中心线的上下偏离值以及锚护转载破碎机与巷道设计中心线的夹角后;掘进方法还包括:
37、启动锚护转载破碎机,以通过掘锚机对当前工位进行锚索和锚杆作业;
38、在锚护转载破碎机完成对当前工位的锚索和锚杆作业后,检测锚护转载破碎机与掘锚机之间的距离是否在预设距离范围内,并检测掘锚机的机身是否静置;
39、当锚护转载破碎机与掘锚机之间的距离在预设距离范围内,且掘锚机的机身静止时,控制锚护转载破碎机向前移动预设步距,以使锚护转载破碎机到达下一工位;
40、当锚护转载破碎机与掘锚机之间的距离不在预设距离范围内,和/或,掘锚机的机身静止时,先使掘锚机运动至预设距离范围内,随后控制掘锚机的机身静止,接着再控制锚护转载破碎机向前移动预设步距,以使锚护转载破碎机到达下一工位。
41、进一步地,掘进系统还包括带式转载机和自移机尾,带式转载机与锚护转载破碎机连接,以通过锚护转载破碎机带动带式转载机移动;掘进方法还包括:
42、检测带式转载机和自移机尾的搭接距离是否为零;
43、当带式转载机和自移机尾的搭接距离为零时,控制掘锚机和锚护转载破碎机均停止向前移动,控制自移机尾向前移动,并根据自移机尾与带式转载机的搭接距离是否回复至初始值对自移机尾的移动距离进行控制。
44、应用本发明的技术方案,通过设置第一定位组件和第二定位组件,能够便于利用集中控制平台、锚护转载破碎机和掘锚机之间的相对位置关系进行定位,便于从整体上对各个部件之间的位置关系进行精准导航和调控,避免了单独设置一个对掘锚机的定位组件进行定位的情况,进而避免了单一的定位组件对掘锚机进行长距离定位而出现的定位不准以及定位精度较差的情况。
- 还没有人留言评论。精彩留言会获得点赞!