一种应用于煤矿移架产尘的智能净尘方法
本发明涉及一种煤矿大采高综采面粉尘净化,特别是涉及一种应用于煤矿移架产尘的智能净尘方法。
背景技术:
1、由于液压支架移架是采煤作业中的主要工序,但移架中的“降架-拉架-升架”多工序会使煤层顶板受力受到影响,而且由于相邻液压支架之间存在空隙,因此煤层顶板发生挤压、碰撞所产生的粉尘及煤块会大量散落在液压支架支架人行道内并发生粉尘扩散,对同样在人行道内工作的作业人员造成粉尘污染,危害工作人员的健康。
2、而现有针对液压支架移架问题,通常是采用安装喷头形成喷雾润湿散落粉尘的方法,但存在以下缺陷:1)会对工人视线造成影响,淋湿、污染工人衣物;2)由于综采面整体风量较大,风幕较难成型,所取得的控尘效果不理想;3)面对大块煤块没有避免方法,大块碎块对于工作人员也存在安全隐患。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种应用于煤矿移架产尘的智能净尘方法,杜绝工作人员施工安全隐患,控尘效果好,解决目前只通过喷头形成喷雾润湿粉尘导致会对工人视线造成影响,淋湿、污染工人衣物,控尘效果不理想,存在安全隐患的问题。
2、为了实现本发明的上述目的,本发明提供了一种应用于煤矿移架产尘的智能净尘方法,包括以下步骤:
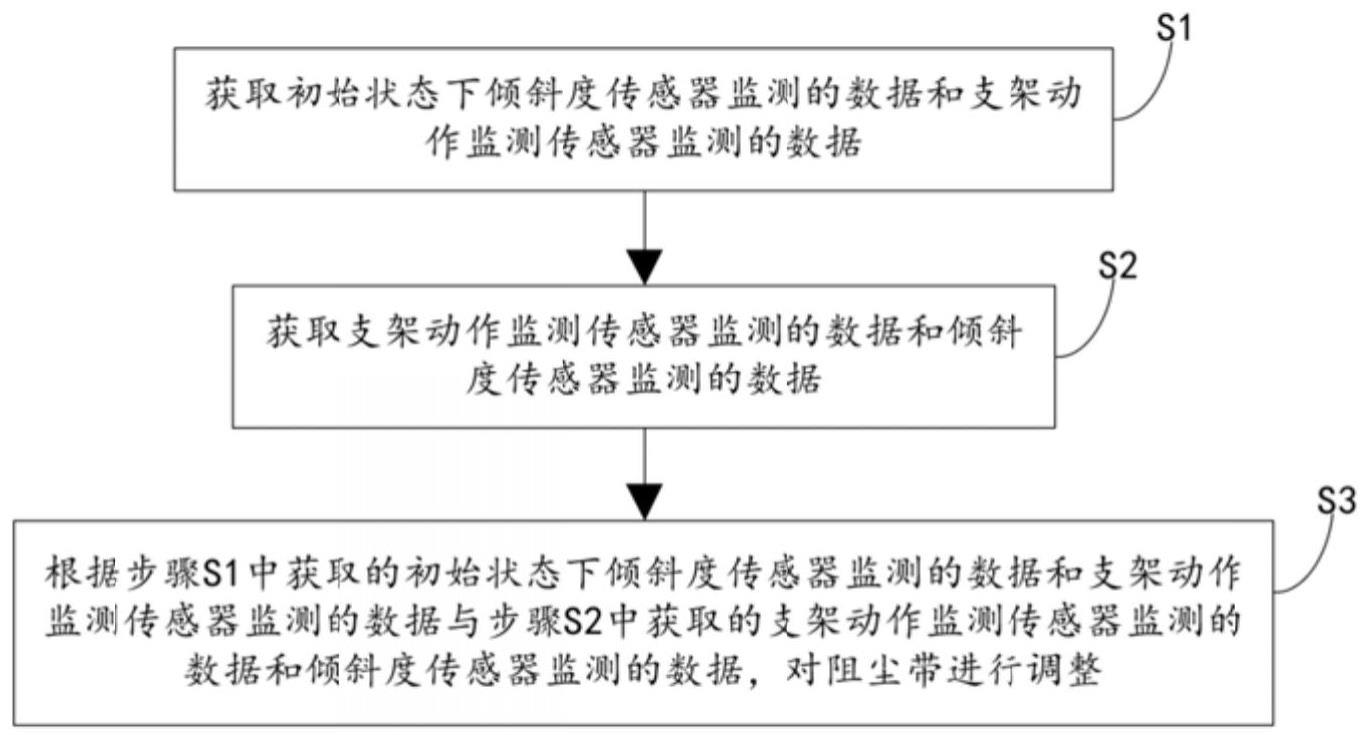
3、s1,获取初始状态下倾斜度传感器监测的数据和支架动作监测传感器监测的数据;
4、s2,获取支架动作监测传感器监测的数据和倾斜度传感器监测的数据;
5、s3,根据步骤s1中获取的初始状态下倾斜度传感器监测的数据和支架动作监测传感器监测的数据与步骤s2中获取的支架动作监测传感器监测的数据和倾斜度传感器监测的数据,对阻尘带进行调整。
6、在本发明的一种优选实施方式,在步骤s3中包括以下步骤:
7、s31,控制器获取第一支架动作监测传感器和第二支架动作监测传感器监测的数据:
8、若第一支架动作监测传感器检测到第一液压支架动作,则执行下一步;
9、若第二支架动作监测传感器检测到第二液压支架动作,则执行步骤s35;
10、s32,若第一支架动作监测传感器检测到第一液压支架上升,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行下一步;
11、若第一支架动作监测传感器检测到第一液压支架下降,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行步骤s34;
12、s33,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
13、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带;返回步骤s3;
14、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s33;
15、s34,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
16、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
17、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s34;
18、s35,若第二支架动作监测传感器检测到第二液压支架上升,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行下一步;
19、若第二支架动作监测传感器检测到第二液压支架下降,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行步骤s37;
20、s36,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
21、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
22、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s36;
23、s37,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
24、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带;返回步骤s3;
25、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s37。
26、在本发明的一种优选实施方式,步骤s31为,
27、控制器获取第一支架动作监测传感器和第二支架动作监测传感器监测的数据:
28、若第一支架动作监测传感器检测到第一液压支架动作,则控制器向多向喷雾喷头发送控制命令,多向喷雾喷头喷出笼罩接尘主槽的雾场,执行下一步;
29、若第二支架动作监测传感器检测到第二液压支架动作,则控制器向多向喷雾喷头发送控制命令,多向喷雾喷头喷出笼罩接尘主槽的雾场,执行步骤s35。
30、在本发明的一种优选实施方式,步骤s32~37为,
31、s32,若第一支架动作监测传感器检测到第一液压支架上升,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行下一步;
32、若第一支架动作监测传感器检测到第一液压支架下降,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行步骤s34;
33、s33,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
34、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
35、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s33;
36、s34,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
37、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
38、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s34;
39、s35,若第二支架动作监测传感器检测到第二液压支架上升,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行下一步;
40、若第二支架动作监测传感器检测到第二液压支架下降,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行步骤s37;
41、s36,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
42、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
43、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s36;
44、s37,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
45、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
46、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s37。
47、在本发明的一种优选实施方式,步骤s32~37为,
48、s32,若第一支架动作监测传感器检测到第一液压支架上升,则控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行下一步;
49、若第一支架动作监测传感器检测到第一液压支架下降,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行步骤s34;
50、s33,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
51、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作;返回步骤s3;
52、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s33;
53、s34,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
54、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
55、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s34;
56、s35,若第二支架动作监测传感器检测到第二液压支架上升,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行下一步;
57、若第二支架动作监测传感器检测到第二液压支架下降,则控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行步骤s37;
58、s36,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
59、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
60、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s36;
61、s37,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
62、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作;返回步骤s3;
63、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s37。
64、在本发明的一种优选实施方式,步骤s32~37为,
65、s32,若第一支架动作监测传感器检测到第一液压支架上升,则控制器向自动喷嘴发出控制命令,自动喷嘴喷出清洗液,控制器再向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行下一步;
66、若第一支架动作监测传感器检测到第一液压支架下降,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行步骤s34;
67、s33,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
68、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作,螺旋式自动清洁刷停止工作之后,控制器向自动喷嘴发出控制命令,自动喷嘴停止喷出清洗液;返回步骤s3;
69、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s33;
70、s34,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
71、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
72、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s34;
73、s35,若第二支架动作监测传感器检测到第二液压支架上升,则控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行下一步;
74、若第二支架动作监测传感器检测到第二液压支架下降,则控制器向自动喷嘴发出控制命令,自动喷嘴喷出清洗液,控制器再向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行步骤s37;
75、s36,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
76、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带;返回步骤s3;
77、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s36;
78、s37,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
79、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作,螺旋式自动清洁刷停止工作之后,控制器向自动喷嘴发出控制命令,自动喷嘴停止喷出清洗液;返回步骤s3;
80、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s37。
81、在本发明的一种优选实施方式,步骤s32~37为,
82、s32,若第一支架动作监测传感器检测到第一液压支架上升,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行下一步;
83、若第一支架动作监测传感器检测到第一液压支架下降,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行步骤s34;
84、s33,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
85、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作,螺旋式自动清洁刷停止工作之后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
86、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s33;
87、s34,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
88、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
89、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s34;
90、s35,若第二支架动作监测传感器检测到第二液压支架上升,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱放长阻尘带,执行下一步;
91、若第二支架动作监测传感器检测到第二液压支架下降,则控制器向自动磁吸座发送控制命令,使其自动磁吸座失磁,自动磁吸座失磁后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷工作,螺旋式自动清洁刷工作之后,控制器向阻尘带自动卷收箱发送控制命令,使其阻尘带自动卷收箱缩短阻尘带,执行步骤s37;
92、s36,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
93、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止放长阻尘带,阻尘带停止运动后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
94、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续放长阻尘带;返回步骤s36;
95、s37,控制器判断步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据是否一致:
96、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据一致,则阻尘带自动卷收箱停止缩短阻尘带,阻尘带停止运动后,控制器向液压马达发送控制命令,使其液压马达驱动旋转的螺旋式自动清洁刷停止工作,螺旋式自动清洁刷停止工作之后,控制器向自动磁吸座发送控制命令,使其自动磁吸座生磁,自动磁吸座生磁后磁吸住阻尘带内嵌的条形铁皮;返回步骤s3;
97、若步骤s2中获取的倾斜度传感器监测的数据与步骤s1中获取的初始状态下倾斜度传感器监测的数据不一致,则阻尘带自动卷收箱继续缩短阻尘带;返回步骤s37。
98、本发明还提供了一种应用于煤矿移架产尘的智能净尘方法的净化系统,包括并列的液压支架和安装在相邻液压支架侧护板之间的接尘喷淋净化装置,所述接尘喷淋净化装置包括接尘主槽、环周包围接尘主槽的挡尘隔离带组件,所述接尘主槽整体呈“u”型结构,且右侧向上延伸形成能安装在液压支架侧护板上的接尘主槽安装板,接尘主槽前端设有露出挡尘隔离带组件的超前接尘槽、后端槽身设有水平折弯部,接尘主槽后部设有阵列排布的滤水孔,所述接尘主槽安装板安装有支架动作监测传感器和自动控制多向喷雾喷头,支架动作监测传感器的监测数据输出端与控制器的支架动作监测数据输入端相连,控制器的喷雾控制端与自动控制多向喷雾喷头的控制端相连,控制器根据支架动作监测传感器监测到的支架移架数据控制自动控制多向喷雾喷头自动启动喷嘴喷出笼罩接尘主槽的雾场;所述挡尘隔离带组件包括阻尘带自动卷收箱、阻尘带、阻尘带固定箱和可抽式滤槽,阻尘带自动卷收箱的控制端与控制器的卷收控制端相连,所述阻尘带固定箱和阻尘带自动卷收箱分别左右对应安装在相邻液压支架侧护板外壁上,所述阻尘带绕过接尘主槽,且两侧向上延伸至收入对应侧阻尘带自动卷收箱、阻尘带固定箱内,所述可抽式滤槽安装在阻尘带围成的“u”槽底部,控制器根据支架动作监测传感器监测到的支架移架数据控制阻尘带自动卷收箱中的阻尘带动作。
99、在本发明的一种优选实施方式,所述自动控制多向喷雾喷头连接有水管,自动控制多向喷雾喷头包括分别位于上方、下方、后方的三个夹角90°的喷嘴,从而能形成笼罩接尘主槽的雾场,喷嘴布局合理。其中位于上方的喷嘴为上喷嘴、位于下方的喷嘴为下喷嘴、位于后方的喷嘴为后喷嘴,这三个喷嘴可以共同控制,也可以单独控制,单独控制时,上喷嘴的控制端与控制器的喷雾控制第一端相连,下喷嘴的控制端与控制器的喷雾控制第二端相连,后喷嘴的控制端与控制器的喷雾控制第三端相连。
100、在本发明的一种优选实施方式,所述阻尘带左侧内嵌有若干平行间隔的条形铁皮,所述阻尘带固定箱的出入口设有能刮擦阻尘带内侧壁的煤渣自清洁刮片、若干朝向阻尘带内侧壁的自动喷嘴和能自动控制吸附条形铁皮的自动磁吸座,自动磁吸座的控制端与控制器的磁吸控制端相连。通过自动磁吸座将阻尘带左侧吸附住,两侧的阻尘带避免粉尘从两侧扩散出去,设计简单。
101、在本发明的一种优选实施方式,所述阻尘带自动卷收箱出入口安装有通过液压马达驱动旋转的螺旋式自动清洁刷,液压马达的控制端与控制器的马达控制端相连,在收卷阻尘带时实现同步清洗,设计精密,有效避免粉尘附着在阻尘带上通过收卷进入阻尘带自动卷收箱内部。
102、在本发明的一种优选实施方式,所述可抽式滤槽安装在阻尘带围成的“u”槽底部,所述阻尘带底部设有排水管,从而将经过可抽式滤槽过滤的污水排出,设计合理。
103、在本发明的一种优选实施方式,所述阻尘带底部后侧设有限位挡板,所述限位挡板设有供可抽式滤槽抽出的开口,从而方便可抽式滤槽抽出倾倒煤渣碎屑,也避免在液压支架移架时可抽式滤槽脱落。
104、综上所述,由于采用了上述技术方案,本发明能够(1)相比于目前只通过喷头形成喷雾润湿散落的粉尘,本发明采用内设接尘主槽进行主要粉尘承接,外设挡尘隔离带组件进行粉尘拦截,首先对移架掉落的煤块及粉尘通过接尘主槽进行有效收集,再利用自动控制多向喷雾喷头形成的雾场对煤层顶板、煤块进行有效润湿从而对粉尘进行全面凝结沉降,挡尘隔离带组件将粉尘围堵消除在净化空间内,可极大降低工人被砸伤以及衣物被污染淋湿的风险,有效避免粉尘扩散,将粉尘及碎石围堵在阻尘带内,全面围堵消灭粉尘,环环相扣,构思新颖。
105、(2)接尘主槽前端设有露出挡尘隔离带组件的超前接尘槽、后端槽身设有水平折弯部,因此接尘主槽前端能围堵粉尘防止扩散,后端能引导煤块掉落至采空区,结构设计精妙,自动控制多向喷雾喷头、阻尘带自动卷收箱均能根据支架动作监测传感器监测到的支架移架数据自动启动,自动化阻尘湿尘。
106、(3)阻尘带围成的“u”槽底部安装有可抽式滤槽,从而能及时卸下积攒的煤矿碎屑,避免承重过重导致阻尘带歪斜,影响阻尘带的封闭效果,通过阻尘带封堵有效避免粉尘扩散对工人视线造成影响,也避免淋湿、污染工人衣物,自动控制多向喷雾喷头喷洒区域由于阻尘带的隔离,空间小能快速形成屏障,有效避免粉尘从前端散出,控尘效果更好;拦截大块煤块,杜绝煤矿碎石砸落到工作人员身上,杜绝安全隐患,消灭粉尘,避免粉尘扩散,保障工作人员身体健康。
107、(4)阻尘带自动卷收箱能根据支架动作监测传感器监测到的支架移架数据,自动下放卷收阻尘带右侧,从而保证可抽式滤槽在液压支架降架、拉架、升架时通过阻尘带右侧的收卷保持平整状态,设计构思新颖,避免阻尘带出现拉扯撕裂,保证装置使用的灵活性。
108、综上所述,具有全面围堵消灭粉尘、自动化阻尘湿尘、控尘效果好、杜绝安全隐患等优点。
109、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!