一种盾构机掘进优化控制方法和装置
本发明属于盾构施工控制参数多目标优化,具体涉及一种盾构机掘进优化控制方法和装置。
背景技术:
1、盾构下穿既有隧道时,盾构机是否沿着隧道设计轴线前进将决定了它对既有隧道所处地层扰动的大小,因此良好的盾构掘进姿态控制对于控制既有隧道变形保证其安运营具有关键作用。如果盾构掘进姿态没有得到较好的控制,盾构机在掘进过程中发生姿态偏转现象,造成土体沉降、既有隧道变形和隧道塌陷以及盾构机挤压管片引起管片错位、开裂等一系列问题,严重影响隧道施工的安全和质量。因此,对盾构掘进姿态进行实时预测,并对掘进路线中产生的姿态偏差进行优化控制是一项具有重要意义的研究工作。
2、由于盾构机与土的相互作用响应机理难以描述,影响盾构机运动行为的因素复杂多样,因素之间存在耦合作用关系,理论模型或数值模拟考虑的因素和机制相对简单,应用起来限制较多难以实现对盾构掘进姿态的准确预测。在盾构掘进姿态控制研究方面,基于模糊理论的控制方法应用较多,而模糊控制主要是依靠盾构司机的经验调整掘进参数,发生在盾构机与dta的偏差出现之后,存在主观性较强,控制滞后等缺点,迫切需要一种具有寻优精度高、鲁棒性强、能够较快获得全局最优解的优点的方案,实现掘进路线中产生的姿态偏差优化控制。
技术实现思路
1、本技术提供一种盾构机掘进优化控制方法和装置,本发明不仅实现了盾构施工工程中的盾构机姿态的高精度预测,也实现了掘进路线中产生的姿态偏差优化控制。
2、第一方面,本技术提供一种盾构机掘进优化控制方法,该方法包括:
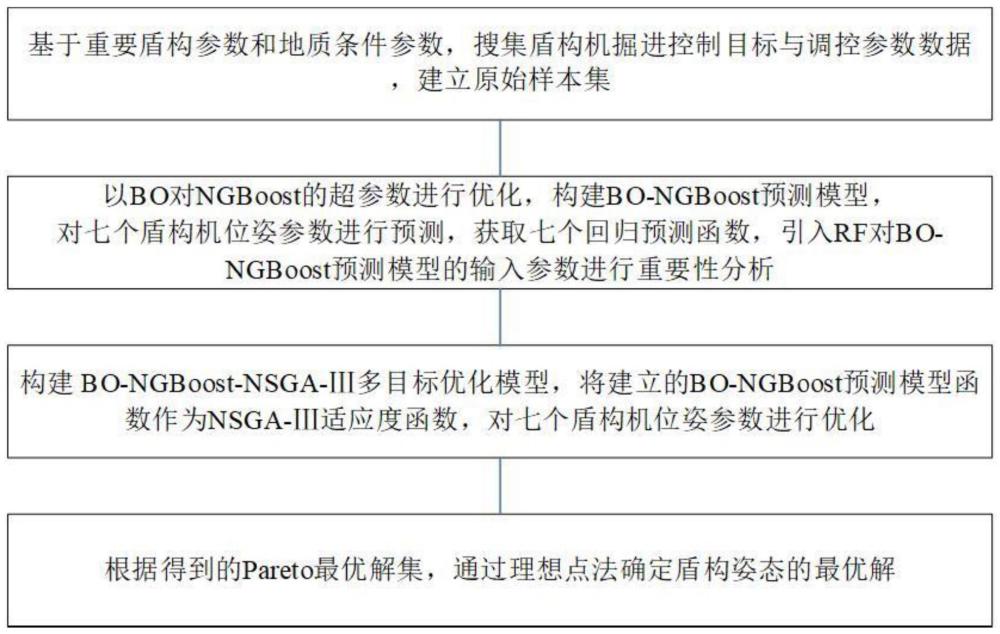
3、获取数据样本,所述数据样本具有输入参数和输出参数,输入参数包括:盾构施工参数,输出参数包括盾构机姿态参数;
4、以bo对ngboost模型的超参数进行多目标优化,构建bo-ngboost预测模型;
5、基于bo-ngboost预测模型对所述盾构机姿态参数进行预测,获取bo-ngboost回归预测函数;
6、利用bo-ngboost回归预测函数为适应度函数,联合各影响因素的应用约束条件,利用nsga-iii算法对盾构掘进姿态参数进行多目标优化,获取最优pareto解集;
7、根据得到的最优pareto解集,通过理想点法确定最优盾构施工参数。
8、作为一种可能的实施方式,还包括:将数据样本集划分为训练集和测试集,并采用训练集和测试集对bo-ngboost预测模型进行超参数优化和预测精度分析。
9、作为一种可能的实施方式,还包括:对bo-ngboost预测模型进行超参数优化进一步包括:
10、以bo对ngboost模型的每次迭代的特征比例、学习率、每次迭代的样本比例和学习器数量四个参数进行优选,并结合5折交叉验证法进行模型精度验证,从而确定精度最高的参数组合为ngboost预测模型的最佳参数。
11、作为一种可能的实施方式,还包括:对bo-ngboost预测模型进行预测精度分析进一步包括:
12、利用决定系数、均方根误差和平均绝对误差三个指标来评价bo-ngboost预测模型的准确性。
13、作为一种可能的实施方式,还包括:引入随机森林rf算法以盾构掘进姿态参数为预测指标对bo-ngboost预测模型的输入参数进行重要性分析,计算所述输入参数的重要性的计算公式为:
14、
15、其中,每一颗决策树的误差率为oobi,i=1,2,3,…,m;在保持其他特征不变的同时,对特征的值随机变换,每一颗决策树的新的误差率为每一颗决策树的新的误差率为oobi',i=1,2,3,…,m。
16、作为一种可能的实施方式,还包括:对所述样本数据进行预处理,将输入参数和输出参数归一化到[-1,1]区间。
17、作为一种可能的实施方式,所述利用nsga-iii算法对盾构掘进姿态参数进行多目标优化,获取最优pareto解集,更进一步包括:
18、以盾构机切口水平和竖直偏差、尾部水平和竖直偏差、俯仰角、水平角和滚动角的绝对值最小化为优化目标,得到ngboost预测回归方程确定的盾构掘进姿态的目标函数;
19、所述目标函数为:
20、minf(x)=[f1(x),f2(x),...,f7(x)]
21、
22、fi(x)=bo-ngboost(x1~x4,x5~x6,x7~x8,x12,x14,x15~x16)
23、式中,x1~x4、x5~x6、x7~x8、x12、x14、x15~x16为土仓压力、千斤顶推力、千斤顶行程、刀盘转速、推进速度和注浆;x为输入参数,xi为约束条件,为应用约束条件xi的最小值,为应用约束条件xi的最大值;式中,x1~x4、x5~x6、x7~x8、x12、x14、x15~x16分别为土仓压力、千斤顶推力、千斤顶行程、刀盘转速、推进速度和注浆;
24、根据工程实际情况对各个输入参数的约束范围进行设置;
25、获取最优pareto解集,采用理想点法从pareto解集中选取最优解的公式为:
26、
27、di给出了第i个解到理想点(0,0,0)的欧氏距离;
28、取距离最小的点作为盾构施工参数多目标优化的最优解。
29、作为一种可能的实施方式,在进行nsga-ⅲ多目标优化之前,选取nsga-ⅲ算法的交叉算子,变异算子,种群大小,最大进化代数和停止代数。
30、作为一种可能的实施方式,所述盾构施工参数包括盾构参数和地质条件参数,所述盾构参数包括:土仓压力、千斤顶推力差、千斤顶行程差、铰接油缸行程差、铰接油压、刀盘转速、刀盘扭矩、推进速度、注浆压力、注浆量、螺旋机转速和螺旋机扭矩,地质条件参数包括内摩擦角、土壤粘聚力和压缩模量,所述盾构机姿态参数包括盾构机切口水平和竖直偏差、尾部水平和竖直偏差、俯仰角、水平角和滚动角。
31、第二方面,本技术实施例提供的一种盾构机掘进优化控制装置,包括:样本获取模块,用于获取数据样本,所述数据样本具有输入参数和输出参数,输入参数包括:盾构施工参数,输出参数包括盾构机姿态参数;
32、模型构建模块,用于以bo对ngboost模型的超参数进行多目标优化,构建bo-ngboost预测模型;
33、预测模块,用于基于bo-ngboost预测模型对所述盾构机姿态参数进行预测,获取bo-ngboost回归预测函数;
34、多目标优化模块,用于利用bo-ngboost回归预测函数为适应度函数,联合各影响因素的应用约束条件,利用nsga-iii算法对盾构掘进姿态参数进行多目标优化,获取最优pareto解集,根据得到的最优pareto解集,通过理想点法确定最优盾构施工参数。
35、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
36、1.本发明中提供的方案,利用bo-ngboost模型,建立了盾构掘进姿态的高精度预测模型,引入rf算法对bo-ngboost模型的输入参数进行重要性分析,确定了重要性排序,不影响结果,保证盾构掘进姿态的预测结果更加准确、可靠。
37、2.本发明将bo-ngboost回归预测函数替代传统的数学函数作为遗传算法适应度函数用于多目标优化之中,准确的映射了盾构掘进姿态与输入参数之间的复杂非线性关系,实现更为精确的优化。
38、3.本发明选用了nsga-ⅲ建立多目标优化模型,与传统的遗传算法相比,nsga-ⅲ算法具备精英策略,保证个体的优越性和种群的多样性,寻优精度高、收敛速度快。
39、4.本发明通过决定系数(r2)、均方根误差(rmse)和平均绝对误差(mae)三个常用指标来评估预测模型的性能表现分析验证了ngboost模型对盾构掘进姿态预测效果的有效性和准确性。
40、5.本发明提供的基于bo-ngboost-nsga-ⅲ的盾构掘进姿态优化控制方法及设备,采用采用理想点法来选取最优决策方案,避免选择过程中人为主观偏好对结果的影响,从nsga-ⅲ算法寻优得到的pareto前沿解集中确定使得多目标函数达到最优的一组最优解,综合考虑了七个目标函数的状态,获取方式简单,得到的结果较客观。
- 还没有人留言评论。精彩留言会获得点赞!