用于油井井下数据自测量的控制系统的制作方法
本发明涉及遥控测井技术装备的设计与制造领域,进一步的,涉及一种用于油井井下数据自测量的控制系统,尤其涉及一种用于井下竖井段和水平井段钻井工程参数采集的自测量控制系统。
背景技术:
1、目前,应用的测井仪器是集流型产出剖面测井仪,该技术也称为产液剖面五参数测井技术,其主要包括:井温、流量、压力、磁定位、含水率五个参数的测量,该技术用于油水两相井,在工程检测、油井生产状态诊断、油田开发效果分析及开发综合调整方面也有较大的应用。目前的技术手段由于采取集流方式,可以使得液流加速,油水充分混合,克服了流速低、流变多量、流体粘度差异、持水率不同,及油水相混合不均匀对测量传感器响应的影响等问题,具有提高测量精度的优点;但是,对于数量较多的水平井,常常因为产液不足而需要进行生产测井找水,测井工作通常有几个主要参数构成,包括油气水流速、含水率、温度和压力剖面,而产液剖面测井是水平井找水技术中最直接、最准确的方式。目前,水平井的测井解释模型大多数都是与直井类似,而带有多种传感器的测井仪器串只适合直井段测井,若遇到斜井或者水平井,则无法下入至指定位置井段,这就需要将测井仪器串输送至水平段进行测井。而目前主要采用以下输送仪器的方法进行水平井组合测井:
2、一、连续油管输送工艺:连续油管又叫挠性油管,是卷绕在卷筒上拉直后,直接下入井下的长油管;该测井技术主要是将组合的测井仪器串,包含多种测量仪器,连接在连续油管管柱的下端,对于水平段或大斜度测井,这种测井方法具有其独到的优势,就是采用连续油管测试可实现长距离输送,就地评估结果,起下平稳地进行测井作业;其缺点是:连续油管是由地面一直下到需要测试的井段,所有工作都是在地面进行控制,如果在下入连续油管的过程中,连续油管受到井眼尺寸和井身结构(如:井眼轨迹、井眼狗腿度、封隔器或者套管接箍变形)等影响,可能会被卡在井身结构异常的井段而不能继续前行,并且在地面拖动连续油管的过程中,容易对井眼或套管造成机械性损伤,而且连续油管比较笨重,运输较为麻烦,费用成本较高。
3、二、牵引器输送工艺:牵引器(又叫爬行器、爬行机器人),其可分为两大类,这两种牵引器也是需要从地面一直带着电缆下入井内,由地面通过连接的电缆下达工作指令,这两种方式是抓靠臂滑动式和转动轮爬行式。抓靠臂爬行机器人易受井眼的不规则性影响,尤其是遇着口袋井或者缩径井眼时,会影响爬行机器人的伸缩臂,在井眼里无法继续前行;而滚轮式机器人则受电缆重量影响,一般线缆进深500-1000米,随行下入的电缆重量超过负重便无法前行。
4、三、水力输送工艺:油田开发过程中利用水力输送工艺测井找水较为常见,该种技术比较容易在现场施行,当仪器串下入井内遇卡时,水力泵能提供动力,可以减少卡堵事故;采用这种工艺时,油井的含水率越高,所测得结果越准确,但是,由于是在大泵压下由水力输送,在泵压下会有物质被挤入地层,会对地层带来污染,影响后期的油气产量和产能。
5、四、钻杆输送工艺:常见的钻杆输送工艺包括保护篮式油管输送工艺和湿接头式油管输送工艺,其中湿接头式油管输送工艺运用最为广泛,两种方式都是要在钻杆的连接下下入井内。钻杆输送一般包括三步,首先是通过钻杆将仪器送到目的层上方,然后进行湿接头对接(这一步是关键,关系到整个测井操作成功与否),最后进行测井作业。该种工艺仅靠测井队独立无法完成,必须与钻井队配合完成,而且也不能实现按照预定程序独立自主实施测试,工艺比较复杂,施工难度大、风险大、时间长。
6、针对相关技术中对测井工具输送效果不佳,所有输送方式都需要有地面工具随行下井,不能由测井工具自主下井并完成测井任务的问题,目前尚未给出有效的解决方案。
7、由此,本发明人凭借多年从事相关行业的经验与实践,提出一种用于油井井下数据自测量的控制系统,以克服现有技术的缺陷。
技术实现思路
1、本发明的目的在于提供一种用于油井井下数据自测量的控制系统,可自行下井并完成井内参数的采集,实现自航测量以及返航作业,解决了测井工具输送需要有地面工具随行下井,不能由测井工具自主下井并完成测井任务的技术问题。
2、本发明的目的可采用下列方案来实现:
3、本发明提供了一种用于油井井下数据自测量的控制系统,所述用于油井井下数据自测量的控制系统包括:
4、控制模块;
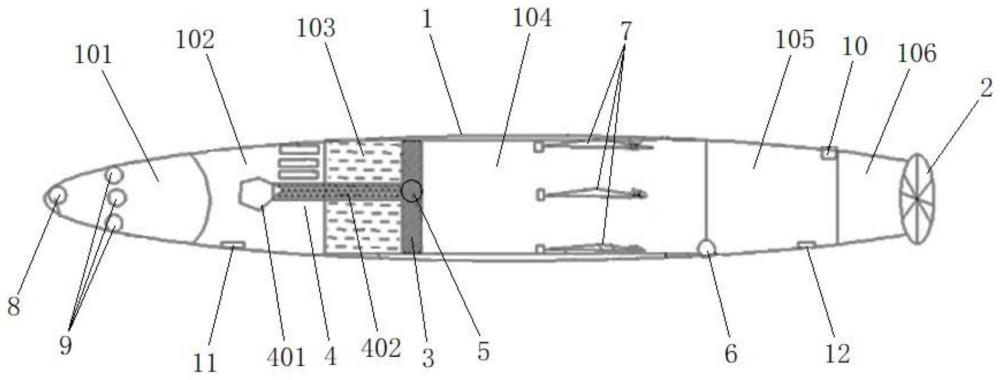
5、自航测量艇,所述自航测量艇上设置有螺旋桨,所述控制模块与所述螺旋桨的控制端电连接,所述控制模块用于控制所述螺旋桨的正反转,以驱动所述自航测量艇在井内前进或后退;
6、测试装置,所述测试装置设置于所述自航测量艇,所述控制模块与所述测试装置电连接,所述控制模块用于接收所述测试装置的检测信号,并对所述测试装置进行控制,以使所述测试装置能对井内数据进行采集并对所述自航测量艇在井内的位置进行定位;
7、悬停装置,所述悬停装置设置于所述自航测量艇,所述控制模块与所述测试装置电连接,所述控制模块用于根据所述测试装置的检测信号,控制所述悬停装置的至少部分位置与井壁相抵,以使所述自航测量艇悬停于井内预设位置;
8、沉浮装置,所述沉浮装置设置于所述自航测量艇,所述控制模块与所述沉浮装置电连接,所述控制模块用于控制所述沉浮装置中液体的容量,以调节所述自航测量艇在井内的沉浮位置。
9、在本发明的一较佳实施方式中,所述用于油井井下数据自测量的控制系统还包括电力供应装置,所述电力供应装置设置于所述自航测量艇,所述电力供应装置与所述测试装置中的各检测元件电连接,所述电力供应装置用于向所述测试装置中的各检测元件进行供电。
10、在本发明的一较佳实施方式中,所述自航测量艇的内部形成有第一仓室,所述第一仓室位于所述自航测量艇的前部;
11、所述控制模块包括控制器;
12、所述测试装置包括数据采集装置,所述数据采集装置包括陀螺仪、三轴加速度传感器、压力传感器、油气水混合比传感器、温度传感器和声波测距仪,所述控制器、所述陀螺仪、所述三轴加速度传感器、所述压力传感器、所述油气水混合比传感器和所述温度传感器均位于所述第一仓室内,所述陀螺仪、所述三轴加速度传感器、所述压力传感器、所述油气水混合比传感器和所述温度传感器分别与所述控制器电连接。
13、在本发明的一较佳实施方式中,所述声波测距仪设置于所述第一仓室的外壁上,所述声波测距仪与所述控制器电连接;
14、所述声波测距仪的数量为至少三个,多个所述声波测距仪沿所述第一仓室的周向间隔排布。
15、在本发明的一较佳实施方式中,所述数据采集装置还包括图像采集装置,所述图像采集装置设置于所述第一仓室的外壁前部,所述图像采集装置与所述控制器电连接,所述图像采集装置用于采集井内图像。
16、在本发明的一较佳实施方式中,所述数据采集装置还包括磁定位器,所述磁定位器设置于所述第一仓室内的前部,所述磁定位器与所述控制器电连接,所述磁定位器用于沿所述自航测量艇的移动路径上检测各油管接箍的位置,以获取所述自航测量艇的实际移动轨迹。
17、在本发明的一较佳实施方式中,所述自航测量艇上设置有usb接口,所述usb接口与所述控制器电连接,通过所述usb接口向所述控制器内预存所述自航测量艇在井内的移动轨迹,以用于与所述磁定位器检测到的所述自航测量艇的实际移动轨迹进行对比。
18、在本发明的一较佳实施方式中,所述自航测量艇上设置有无线发射装置,所述无线发射装置用于与地面的无线接收装置通信连接。
19、在本发明的一较佳实施方式中,所述沉浮装置位于所述自航测量艇的内部且位于所述第一仓室的后方;
20、所述沉浮装置包括依次设置且相隔离的第二仓室、气体压缩仓室和沉浮控制仓室,所述气体压缩仓室与所述沉浮控制仓室之间通过可移动的活塞进行分隔,所述活塞与驱动装置相连,以带动所述活塞在所述气体压缩仓室与所述沉浮控制仓室之间移动;
21、所述气体压缩仓室内设置有压缩部,所述压缩部内具有压缩气体,所述压缩部上设置有内通电磁阀,以对所述压缩部内的压缩气体进入气体压缩仓室进行控制;
22、所述沉浮控制仓室的仓壁上设置有外通电磁阀,以对所述沉浮控制仓室与外界的通断进行控制;
23、通过移动所述活塞改变所述气体压缩仓室和所述沉浮控制仓室的体积,通过导通所述外通电磁阀改变进入所述沉浮控制仓室内的液体量,以调节所述自航测量艇在井内的沉浮高度。
24、在本发明的一较佳实施方式中,所述驱动装置包括驱动电机和丝杆,所述驱动电机设置于所述第二仓室内,所述丝杆的一端位于所述第二仓室内且与所述驱动电机的输出轴连接,所述丝杆的另一端密封穿过所述第二仓室与所述气体压缩仓室之间的隔板并与所述活塞密封螺接,所述自航测量艇1的内壁对所述活塞周向限位,以使所述丝杆转动状态下,所述活塞能沿所述丝杆的轴向移动。
25、在本发明的一较佳实施方式中,所述悬停装置包括设置于所述自航测量艇的外壁上的多个支撑臂,多个所述支撑臂沿所述自航测量艇的周向间隔布设,多个所述支撑臂可伸出至与井壁相抵,以将所述自航测量艇固定于井内预设位置。
26、在本发明的一较佳实施方式中,所述自航测量艇的内部形成有电池仓室,所述电池仓室内设置有电池,所述电池与所述测试装置中的各检测元件电连接;
27、所述电池仓室的仓壁上设置有充电插口,所述充电插口与所述电池的充电端电连接。
28、在本发明的一较佳实施方式中,所述自航测量艇的内部形成有推进系统仓室,所述推进系统仓室位于所述自航测量艇的后部,所述推进系统仓室内设置有电机,所述螺旋桨位于所述自航测量艇的后部且与所述电机的输出轴连接。
29、在本发明的一较佳实施方式中,多个所述自航测量艇通过线缆相串接,所述自航测量艇的前部和后部分别设置有推进泵,以通过所述推进泵为所述自航测量艇的移动提供推进力。
30、由上所述,本发明的用于油井井下数据自测量的控制系统的特点及优点是:在自航测量艇上设置有控制模块、螺旋桨、测试装置、悬停装置和沉浮装置,控制模块可用于控制螺旋桨的正反转,以驱动自航测量艇在井内前进或后退;控制模块还能够根据接收测试装置的检测信号,并对测试装置进行控制,以使测试装置能对井内数据进行采集并对自航测量艇在井内的位置进行定位;控制模块还能够根据测试装置的检测信号,控制悬停装置的至少部分位置与井壁相抵,以使自航测量艇悬停于井内预设位置;控制模块还能够控制沉浮装置中液体的容量,以调节自航测量艇在井内的沉浮位置。通过控制模块、螺旋桨、测试装置、悬停装置和沉浮装置的配合工作,使得自航测量艇在井内移动,可通过自航测量艇上设置测试装置对井内数据进行实时采集并对自航测量艇在井内的位置进行定位,并确保自航测量艇能够稳定悬停于井内预设位置,以及实现自航测量艇的避障功能,确保油井井内参数采集任务的顺利完成,本发明的用于油井井下数据自航测量装置无需地面工具随行下井,可自行下井并完成井内参数的采集,完成测井任务,实现自航测量以及返航作业。
- 还没有人留言评论。精彩留言会获得点赞!