一种基于视觉的煤矿井下钻孔机器人钻具引导机构及方法
本发明涉及一种基于视觉的煤矿井下钻孔机器人钻具引导机构及方法,属于矿井瓦斯灾害防治。
背景技术:
1、随着社会发展,煤炭开采步伐日益加快,对煤炭开采效率具有较高要求。但是一些矿井为高瓦斯或高应力情况,必须对其巷道内进行瓦斯抽采及钻孔卸压,使其达到安全要求后才能进行后续工作;这种条件下人工不仅难以直接施工,而且效率较低。井下钻进机器人是一种应用于煤矿等地下矿山的设备,它可以实现井下工作面巷道所需位置的瓦斯钻孔及抽放工作无需人工干预,具备自主行走、自动钻进等功能。这种机器人主要用于煤矿井下的钻孔作业,从而提高钻孔作业的效率和质量。
2、但是由于煤矿井下防冲卸压和瓦斯抽采对钻孔处的定位精度要求较高,而目前现有的井下钻进机器人由于自身依靠液压驱动的方式来进行定位,无法满足定位精度以及钻进角度的需求,
3、因此,如何一种新的钻具定位装置及方法,使钻孔机器人能精准对钻孔位置进行定位,并引导钻具达到钻孔位置进行钻孔,从而有效提高了钻孔精度,是本发明所需研究的方向。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种基于视觉的煤矿井下钻孔机器人钻具引导机构及方法,通过视觉识别及定位方式使钻孔机器人能精准对钻孔位置进行定位,并采用特定的位置调节机构引导钻具达到钻孔位置进行钻孔,从而有效提高了钻孔精度。
2、为了实现上述目的,本发明采用的技术方案是:一种基于视觉的煤矿井下钻孔机器人钻具引导机构,包括上钻台、下钻台、俯仰机构、水平旋转机构、步进电机和防爆摄像仪;
3、所述上钻台上装有钻具,防爆摄像仪装在钻具上方,用于拍摄钻具前方的图像并反馈给钻孔机器人的控制处理系统进行视觉定位;
4、所述下钻台上表面设有移动副导槽、齿条槽和滚动副导轨,移动副导槽、齿条槽和滚动副导轨各自的走向相互平行且均垂直于钻具的钻进方向;所述上钻台下表面装有移动副滑块、位移齿轮和滚动副滑轮,上钻台放置在下钻台上部,其中位移齿轮处于齿条槽上、两者啮合构成齿轮齿槽副,用于驱动上钻台沿齿条槽移动;滚动副滑轮处于滚动副导轨上、两者构成滚动副,用于支撑上钻台并在上钻台移动时沿着滚动副导轨移动;移动副滑块处于移动副导槽内、两者构成移动副,且移动副滑块底部与移动副导槽底部之间留有间隙,这样能降低移动时的摩擦力,用于在上钻台移动时沿着移动副导槽移动,并在钻具钻进时使上钻台和下钻台压紧固定;
5、所述步进电机装在上钻台上,步进电机的输出轴上装有第一齿轮,第一齿轮与第二齿轮啮合传动;第二齿轮与位移齿轮装在同一转轴上,当步进电机转动时,通过第一齿轮带动第二齿轮转动,进而使位移齿轮与第二齿轮同步转动并驱动上钻台沿齿条槽移动;
6、所述俯仰机构装在上钻台,用于调节钻具在法面上的角度;所述水平旋转机构装在下钻台,用于调节钻具在水平面上的角度。
7、进一步,还包括液压锁,液压锁装在下钻台上表面,用于使上钻台在齿条槽方向上与下钻台相对固定。通过设置液压锁能在上钻台相对下钻台移动后进行定位,使上钻台不会沿着齿条槽窜动,保证后续钻具钻进时的稳定性。所述液压锁处于下钻台中心。处于这个位置能起到更好的锁紧定位作用。
8、进一步,所述滚动副导轨为两个,所述滚动副滑轮为四个,其中两个滚动副滑轮处于一个滚动副导轨上,另外两个滚动副滑轮处于另一个滚动副导轨上。通过设置多个滚动副滑轮对上钻台进行多位置支撑,使得上钻台相对下钻台移动时更稳定。
9、进一步,所述移动副导槽和移动副滑块均为两个,每个移动副滑块分别处于一个移动副导槽内。这样能保证上钻台移动时沿着移动副导槽移动导向更顺利,并在钻具钻进时移动副滑块一侧与移动副导槽侧壁压紧受力,使上钻台和下钻台压紧固定,保证钻具钻进时的稳定性。
10、进一步,所述控制处理系统包括主控制器和智能控制器,其中智能控制器为树莓派,用于对防爆摄像仪拍摄的图像进行识别及钻孔视觉定位,并发送指令给主控制器;所述主控制器为plc,用于接收智能控制器的指令并控制钻孔机器人行走及调整钻具位姿。
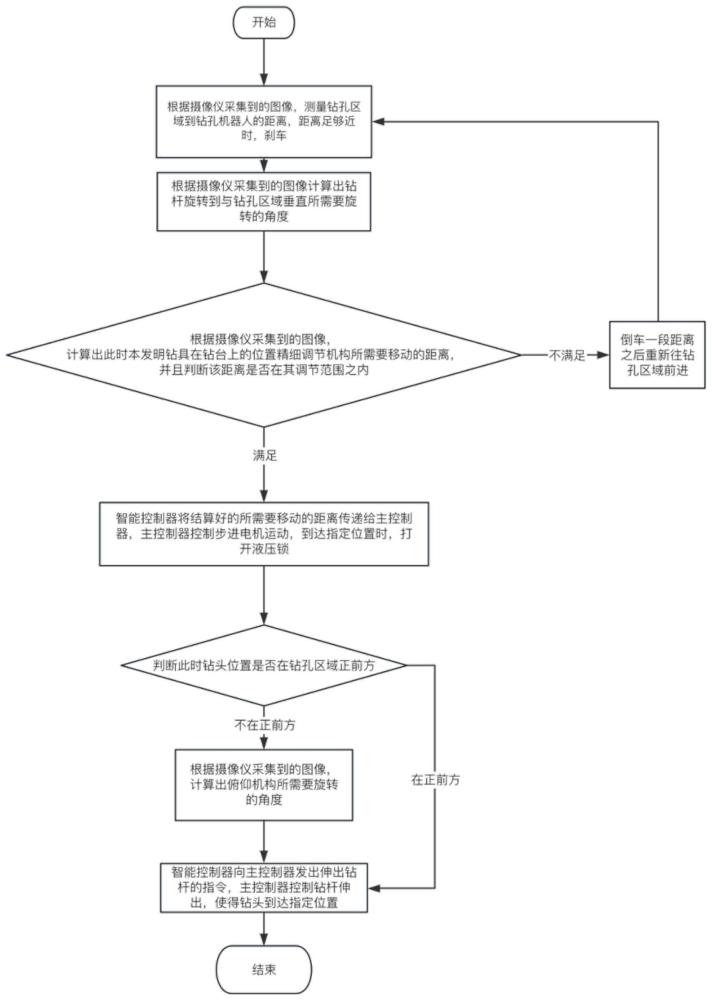
11、上述基于视觉的煤矿井下钻孔机器人钻具引导机构的工作方法,具体步骤为:
12、步骤一:钻孔机器人启动在巷道上运行,防爆摄像仪将采集到的实时图像反馈给钻孔机器人的控制处理系统,控制处理系统利用预先训练好的yolov8网络对图像进行识别,若该图像内存在钻孔区域,则控制处理系统利用单目视觉原理中的三角测量原理测量此时钻孔机器人到预定钻孔处的距离,若此时距离达到要求,则控制处理系统发送停车的命令,此时控制钻孔机器人进行刹车;
13、步骤二:钻孔机器人刹车之后,防爆摄像仪将采集到的实时图像反馈给钻孔机器人的控制处理系统,控制处理系统利用yolov8网络对图像进行识别,识别出图像中钻孔的位置,再将识别出的位置利用单目小孔成像原理进行空间解算,计算出此时的水平旋转机构需要旋转的角度,控制处理系统根据计算好的结果控制水平旋转机构进行旋转,直到钻具1所在法面与钻孔位置所在平面垂直;
14、步骤三:防爆摄像仪继续将采集到的实时图像反馈给钻孔机器人的控制处理系统,控制处理系统利用yolov8网络对图像进行识别,识别出图像中钻孔的位置,利用单目小孔成像原理和三角测量原理进行空间解算,计算出此时钻具需要在钻台上移动的距离,若此时该计算出的距离超出了上钻台在下钻台上移动的最大调节距离,则控制钻孔机器人向后回退一段距离,并重复步骤一至三,直到满足条件为止;
15、步骤四:控制处理系统根据步骤三得出的钻具需要在下钻台上移动的距离,控制步进电机转动,使得上钻台沿齿条槽方向在下钻台上移动,移动到指定位置时,此时钻具与钻孔位置处在同一法面上;启动液压锁,上钻台在齿条槽方向上与下钻台相对固定,防止发生窜动;若此时钻具正对钻孔位置,即两者同轴,则直接进入步骤六,否则进入步骤五;
16、步骤五:控制处理系统利用yolov8网络对图像进行识别,识别出图像中钻孔的位置,利用单目小孔成像原理和三角测量原理进行空间解算,计算出此时俯仰机构需要旋转的角度,控制处理系统根据解算好的角度信息控制俯仰机构进行旋转,直至到达指定位置;
17、步骤六:当控制处理系统发送钻进的数据,控制钻杆进行钻进操作。
18、进一步,所述步骤一中确定钻孔机器人到预定钻孔处的距离具体计算公式为:
19、
20、其中r为单位矩阵,t通过测量钻孔机器人的位移得到,x1、x2分别为同一点在拍摄的两张图像上两个位置的归一化坐标;通过上述方程能计算得出防爆摄像仪光心到预定钻孔处的距离。
21、进一步,所述步骤二中利用单目小孔成像原理进行空间解算的具体步骤为:设钻孔区域为正方形区域,而竖直方向上的边界线与相机的归一化平面平行,则钻孔区域实际竖直方向的边界线长度和其在防爆摄像仪上生成的图像长度之间的比例为k,但是由于水平方向上的边界线和摄像仪归一化平面存在倾斜角度,所以其相对于竖直方向而言被缩放了更多,钻孔区域实际水平方向的边界线长度和其在防爆摄像仪上生成的图像长度之间的比例为根据几何关系得出水平旋转机构需要旋转的角度为:
22、进一步,所述步骤三中利用单目小孔成像原理和三角测量原理进行空间解算的具体步骤为:首先防爆摄像仪在水平面转动一个角度,分别拍摄下转动前和转动后的图像,将其分别输入到yolov8神经网络中,识别出两张图像上钻孔区域的位置,并且利用fast-12算法找到所有的顶点,选择钻孔区域右上角顶点p,然后计算该点到防爆摄像仪光心的距离,具体计算式为:
23、
24、其中:β为防爆摄像仪旋转的角度,t为平移量,x1、x2分别为p点在两个位置的归一化坐标,由于此时发生的是纯旋转,故t=0;由上述方程求出d1后,根据图像相似的特性求出钻具需要在钻台上移动的距离
25、进一步,所述步骤五中利用三角测量以及单目小孔成像的原理来进行空间解析的具体步骤为:首先利用步骤三中的方法计算出钻孔区域内中心点距离防爆摄像仪光心的距离d,然后再利用小孔成像原理中的几何关系求出钻孔区域中心与防爆摄像仪光心之间的垂直距离h1,最后根据几何关系求出俯仰机构需要旋转的角度b。
26、与现有技术相比,本发明采用上钻台、下钻台、俯仰机构、水平旋转机构、步进电机和防爆摄像仪相结合方式,具有如下优点:
27、1、本发明中俯仰机构用于调节钻具在法面上的角度;水平旋转机构用于调节钻具在水平面上的角度;上钻台能在下钻台上沿着垂直与钻具钻进方向移动,步进电机为上钻台移动提供动力,通过步进电机的驱动能实现钻具位置的调节,上述机构相互配合实现钻具位置的精细调节。
28、2、本发明中防爆摄像仪用于拍摄钻具前方的图像并反馈给钻孔机器人的控制处理系统,控制处理系统根据拍摄的图像采用特定的视觉定位方法先确定钻孔区域的位置,然后根据钻孔区域与钻具之间的距离及角度情况,引导控制处理系统控制俯仰机构、水平旋转机构和步进电机相互配合,使得钻具对准钻孔位置;这种方法不仅使得钻孔机器人能精准对钻孔位置进行定位,而且稳定性高,从而保证钻孔机器人在煤矿内能稳定且精准的实施钻孔作业,有效提高了钻孔作业的效率和质量。
- 还没有人留言评论。精彩留言会获得点赞!