一种盾构机土压平衡控制装置及方法与流程
本发明属于盾构机,尤其涉及一种盾构机土压平衡控制装置及方法。
背景技术:
1、如今,城市必须不断扩大规模以适应经济剧烈增长带来的社会发展与乡村的城市化进程。因此,谁能将地下空间更好地开发与利用,就能在城市化上更进一步。参照我国发展现状,在未来的很长一段时间内,将会有项目众多的地下工程建设,如地下交通体系、市政排水管道等,以此来应对地表空间的紧张与不足。
2、土压平衡式盾构机的特点是将开挖出的渣土直接用作支护介质。当开挖仓内的土体压力与周围土壤和地下水的压力相等时,就实现了必要的土压平衡,但是由于地质条件复杂,因此,如何保证施工安全有效地进行,一直倍受国内外专家与学者的关注。是否能够将密封舱的土压保持在可控范围内,是当前社会应用最广泛地土压平衡式盾构机能否保持其开挖面稳定的关键因素。一些灾难性事故,如地表隆起或地表塌陷,都是因为在盾构机工作过程中,盾体前方水土压力无法控制导致的。
3、现有的土压平衡控制方法主要是盾构司机凭借盾构驾驶经验调节推进速度或螺旋输送机转速,该操作模式,对于操作盾构机的司机的专业水平与施工经验要求较高,依赖性较大。因此,必然存在着精度低、主观性强、不能完全考虑如刀盘扭矩等其他因素对密封舱土压造成的影响等问题。
4、专利号为:cn 113847049b,名称为一种土压平衡盾构机土压智能控制系统的发明专利中提到,通过土压平衡盾构土压智能控制系统,克服了在盾构施工中由于人为施工经验不足带来对施工的影响因素,而且土压智能控制的实现,也将大幅提高盾构施工效率,避免地表沉降与隆起的发生,在保证盾构施工安全和质量的同时,降低盾构司机工作强度。该发明通过智能控制系统在一定程度上对土压平衡实现了自动控制,但是仍存在一定的不足之处,譬如,在大直径的盾构机掘进过程中,仅仅通过对底部螺旋输送机的转速控制很难快速有效的对土压进行平衡,并且会存在较大误差,并且由于算法计算的复杂性,对掘进速度的控制也会导致掘进效率的降低,从而极大影响整个掘进工程的进度,因此,我们提出一种盾构机土压平衡控制装置及方法。
技术实现思路
1、本发明的目的是为了解决了现有技术中存在的缺点,而提出的一种盾构机土压平衡控制装置及方法。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
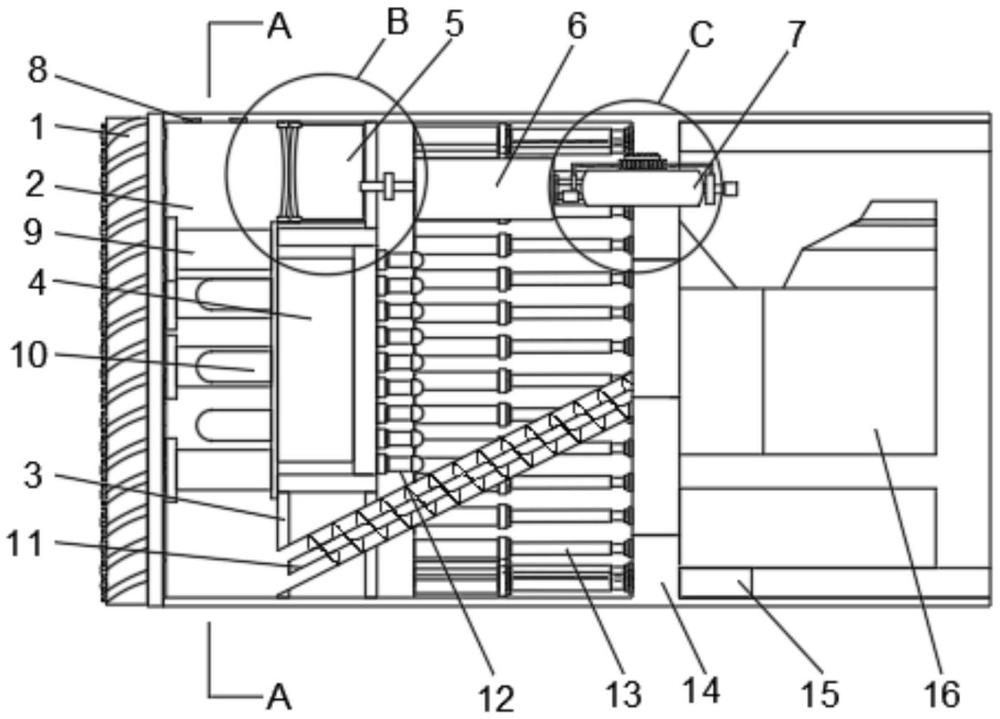
3、本发明为一种盾构机土压平衡控制装置及方法,包括刀盘、plc控制系统、土压预测数据输出系统、输送机转速数据输出系统以及土压平衡控制系统,所述刀盘的内部设有密封舱,所述密封舱的侧面固定设置有压力仓板,所述压力仓板的顶部和前后固定设置有压力平衡仓,所述土压预测数据输出系统和输送机转速数据输出系统对plc控制系统进行通讯,所述plc控制系统对土压平衡控制系统进行通讯;
4、所述压力平衡仓的内部固定设置有固定销,所述固定销之间固定设置有外平衡膜和内平衡膜,所述压力平衡仓的内表面固定设置有承压密封仓壁,所述压力平衡仓的侧面固定设置有压力平衡器,所述压力平衡仓与压力平衡器之间设置有平衡管,所述平衡管的内部固定设置有平衡阀,所述平衡管联通至压力平衡仓和压力平衡器内部;
5、所述plc控制系统包括人机交互控制单元、输出控制单元、掘进数据采集单元,其中,所述输出控制单元对土压平衡控制系统进行控制数据输出,所述掘进数据采集单元对土压预测数据输出系统和输送机转速数据输出系统进行通讯;
6、所述土压预测数据输出系统包括pso-lssvm土压预测模型,所述pso-lssvm土压预测模型针对掘进数据采集单元进行分析处理进而输出下一刻土压的预测值;
7、所述输送机转速数据输出系统包括输送机转速计算模型,所述输送机转速计算模型对pso-lssvm土压预测模型输出的数据进行计算处理进而输出输送机转速数据,所述土压平衡控制系统包括螺旋输送机控制模块和压力稳定器控制模块,在实际使用时,盾构机首先进行初步掘进收集掘进数据,在此过程前对盾构机各项参数进行初步设定,通过plc自动控制系统进行数据通讯,对压力稳定器控制模块进行初步压力设定,对螺旋输送机控制模块进行初步控制,盾构机初步开始掘进工作,此时密封舱内部开始逐步带压,维持螺旋输送机的转速保持在低转速水平,通过电气数据通讯使电气控制器控制电气控制阀打开,从而使充气器对压力平衡器进行充气,逐步提高到压力平衡器内部压力达到初步设定值,在此过程中逐步打开平衡阀,使压力平衡仓内部逐步带压,与密封舱内部压力上升趋势维持平衡;在盾构机正常掘进工作后,掘进数据采集单元对各项数据进行采集,尤其是当前时刻的密封舱的实时压力数据,通过土压预测数据输出系统进行下一时刻的密封舱压力数据预测,通过输送机转速数据输出系统进行螺旋输送机转速的调整数据,通过plc自动控制系统进行数据整合,智能分析,从而得出下一刻盾构机的各项参数进行自动调节,由于地质环境的复杂性,不能完全正确预测下一时刻的密封舱压力,因此压力平衡仓开始发挥作用,压力平衡仓的压力会随着密封舱压力的变化而变化,在平稳工况下,压力平衡仓的压力会大致等于密封舱压力等于开挖面压力,由此达到土压平衡,这是因为压力平衡仓内外压力差相等,如果工况发生改变,密封舱压力升高或降低,会导致压力平衡仓的外平衡膜和内平衡膜产生压力差,从而导致内外平衡膜的形变,这个形变趋势总是会朝着压力差为零的方向改变,此时会导致密封舱压力变化波动小,压力趋于稳定,从而方便plc自动控制系统更好的对螺旋输送机进行调节,达到稳定土压平衡的目的。
8、进一步地,所述压力平衡器的侧面固定设置有充气器,所述压力平衡器与充气器之间固定设置有充气管和回气管,所述充气管和回气管均联通压力平衡器与充气器的内部,所述充气管的内部固定设置有电气控制阀、所述回气管的内部固定设置有回气泵,所述充气器的顶部固定设置有电气控制器,所述电气控制器与电气控制阀和回气泵电性连接,工作时,所述电气控制器通过控制电气控制阀和回气泵来调节压力平衡仓内部的气体压力,充气器内部气体为氮气或其他惰性气体,如升高压力平衡仓内部压力,打开电气控制阀,降低压力平衡仓内部压力,打开回气泵,从而达到气体的循环往复使用。
9、进一步地,所述密封舱的内部阵列设置有压力传感器,所述压力仓板和刀盘之间固定设置有推进杆,所述压力仓板的中部转动设置有搅拌器,所述搅拌器的一侧上固定设置有搅拌臂,工作时,通过注入水、膨润土或泡沫等各种改良土壤材料,改变土壤的粘性、质地和透水性。通过搅拌器对密封舱内部的泥土进行搅拌,使得泥土达到理想状态,可以保证压力的均衡,提高密封舱泥土的流动性和止水性。
10、进一步地,所述压力仓板的底部固定设置有螺旋输送机,所述搅拌器的另一侧固定设置有液压油缸组,所述压力仓板的侧面固定设置有支撑臂,所述支撑臂的侧面固定设置有支撑瓦片,所述支撑瓦片的内部设置有尾盾,尾盾的侧面固定设置有管片拼装机,所述压力仓板的后侧固定设置有检修室,工作时,支撑臂可以使盾构机进行掘进,并提供支撑,所述支撑瓦片在盾构机挖掘后的地方进行砌衬,以提供支撑,尾盾用密封刷密封尾盾内壁和支撑瓦片外缘之间的空隙,管片拼装机对支撑瓦片进行装填。
11、进一步地,所述pso-lssvm土压预测模型包括lssvm算法模型建立和pso算法优化,所述lssvm算法模型建立如下:
12、将下一时刻的螺旋输送机转速作为模型的输入变量。
13、模型的输入为:
14、推进速度v(t);
15、盾构机总推进力f(t);
16、刀盘扭矩m(t);
17、当前时刻螺旋输送机转速n(t);
18、下一时刻螺旋输送机转速n(t+1);
19、当前时刻密封舱土压值p(t)。
20、模型的输出为:下一时刻密封舱土压p(t+1)。
21、所述lssvm算法模型如下:
22、p(t+1)=f(v(t),f(t),m(t),n(t),n(t+1),p(t))
23、所述pso算法优化公式为:
24、vid=ωvid+c1random(0,1)(pid-xid)+c2random(0,1)(pgd-xid)
25、xid=xid+vidvid=ωvid
26、其中:ω为惯性权重系数,c1和c2为加速度常数,random(0,1)代表0-1之间的随机数,vid为次迭代的粒子速度,xid为每次迭代的粒子位置,pid为粒子个体最优值,pgd为种群全局最优值。
27、所述pso-lssvm土压预测模型中的适应度算法如下:
28、
29、yi和分别为第i个土压样本的实际值和预测值,m为样本数目。
30、所述以上算法在优化训练后输出下一刻土压预测值,与所述plc控制系统进行通讯,工作时,pso-lssvm土压预测模型基于pso粒子群优化算法对lssvm算法进行优化从而在大量的实际数据训练中进行下一刻土压的预测,使得预测的偏差值很小。
31、进一步地,所述输送机转速计算模型使用所述pso-lssvm土压预测模型的输出数据,基于foa的螺旋输送机转速优化算法,所述输送机转速计算算法模型如下:
32、pi为预测值,p0为压力传感器的数据值,nmax和nmin分别为螺旋输送机最大和最小转速,为0-22rpm,目标函数如下:
33、
34、s.t.nmin≤n(t+1)≤nmax
35、迭代次数mangen、规模popsize、初始位置x_axis、y_axis,s.t.nmin为个体与原点距离。
36、所述结果输出螺旋输送机转速数据,通过输送机转速计算算法模型通过预测的压力值进行转速的最优求解,从而得到螺旋输送机的稳定转速数据,螺旋输送机在误差很小的数据下进行工作,使得密封舱内部压力更加趋于稳定。
37、进一步的,所述土压预测数据输出系统输出土压预测数据通过输出控制单元对压力稳定器控制模块进行通讯,所述通讯数据通过电气控制器进行输出,所述电气控制器对电气控制阀和回气泵进行动作控制,所述输送机转速数据输出系统输出转速数据通过输出控制单元对螺旋输送机控制模块进行通讯,工作时,掘进数据采集单元对各项数据进行采集,尤其是当前时刻的密封舱的实时压力数据,通过土压预测数据输出系统进行下一时刻的密封舱压力数据预测,通过输送机转速数据输出系统进行螺旋输送机转速的调整数据,通过plc自动控制系统进行数据整合,智能分析,从而得出下一刻盾构机的各项参数进行自动调节。
38、本发明具有以下有益效果:
39、1、本发明通过plc控制系统对盾构机进行自动控制,提高了盾构机的运行效率,通过土压预测数据输出系统、输送机转速数据输出系统以及土压平衡控制系统对盾构机掘进过程中的土压平衡进行稳定控制,并提高盾构机在复杂地质环境下掘进时保持土压平衡的能力。
40、2、本发明通过压力平衡仓可以在密封舱压力突变的情况下,螺旋输送机来不及调节的情况下在一定压力范围内作为缓冲,从而提高盾构机土压平衡控制系统的容错能力,进一步降低了在盾构机工作工程中,盾体前方水土压力无法控制,导致地表隆起或地表塌陷的风险。
41、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!