本发明涉及机锁钻杆,更具体地说,涉及一种机锁钻杆控制方法。此外,本发明还涉及一种用于实施上述机锁钻杆控制方法的监控模拟系统及包括上述监控模拟系统的工程机械。
背景技术:
1、现有技术中,使用机锁伸缩钻杆时,钻杆地下部分为不可见的部分,其相关的加压台连接的解锁情况无法直观的观察,当钻杆上提回收时,需要进行相应的解锁操作,这对于操作者尤其是经验不丰富的操作者来说难度较大,容易出现带杆事故,损坏设备,甚至出现人员伤亡的情况,为客户带来巨大的经济财产损失。
2、综上所述,如何提供一种可方便观察钻杆带杆情况的控制方法,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种机锁钻杆控制方法,可通过判断钻杆是否处于带杆状态,方便观察钻杆带杆情况,避免带杆事故。
2、本发明的另一目的是提供一种用于实施上述机锁钻杆控制方法的监控模拟系统及包括上述监控模拟系统的工程机械。
3、为了实现上述目的,本发明提供如下技术方案:
4、一种机锁钻杆控制方法,应用于机锁钻杆装置,所述机锁钻杆装置包括桅杆、钻杆、带动所述钻杆升降的主卷扬、动力头、带动所述动力头升降的动力头卷扬、第一测力传感器及第二测力传感器;所述第一测力传感器用于获取所述主卷扬的第一拉力信息gz,所述第二测力传感器用于获取所述动力头卷扬的第二拉力信息gd;
5、所述机锁钻杆控制方法包括:
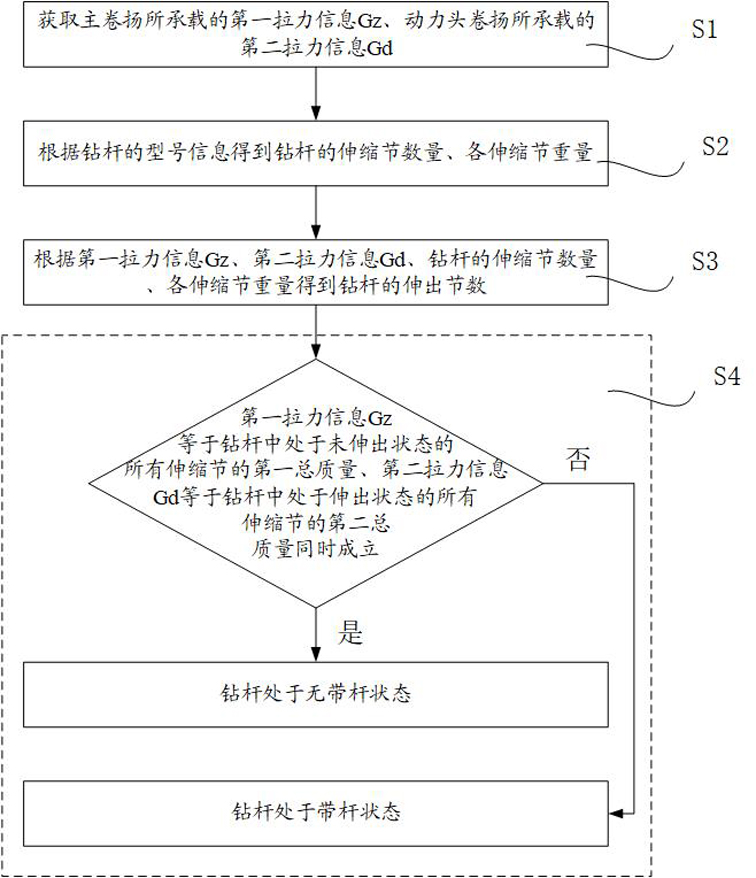
6、获取所述主卷扬所承载的第一拉力信息gz、所述动力头卷扬所承载的第二拉力信息gd;
7、根据所述钻杆的型号信息得到所述钻杆的伸缩节数量、各伸缩节重量;
8、根据所述第一拉力信息gz、所述第二拉力信息gd、所述钻杆的伸缩节数量、各伸缩节重量得到所述钻杆的伸出节数;
9、判断所述第一拉力信息gz等于所述钻杆中处于未伸出状态的所有伸缩节的第一总质量、所述第二拉力信息gd等于所述钻杆中处于伸出状态的所有伸缩节的第二总质量是否同时成立,若是,则所述钻杆处于无带杆状态,若否,则所述钻杆处于带杆状态。
10、可选地,定义所述钻杆的伸缩节数量为n,其中n为大于或等于2的正整数;所述钻杆的总重量为gn,各伸缩节的重量依次为:g1、g2、g3、……gn;
11、所述根据所述第一拉力信息gz、所述第二拉力信息gd、所述钻杆的伸缩节数量、各伸缩节重量得到所述钻杆的伸出节数包括:
12、判断所述第一拉力信息gz是否等于所述钻杆的总重量,若是,则所述钻杆的伸缩节均未伸出,若否,则进入下一步;
13、定义前m个伸缩节的总重量为gm,其中m为大于或等于2的正整数;
14、判断所述第二拉力信息gd小于或等于gm且大于前m个伸缩节的总重量为gm与第m个伸缩节的重量gm的差值、所述第一拉力信息gz大于或等于所述钻杆的总重量为gn与前m个伸缩节的总重量gm的差值是否同时成立,若是,则所述钻杆的伸出节数为m。
15、可选地,所述机锁钻杆装置还包括第一测距传感器及第二测距传感器;所述第一测距传感器用于获取所述动力头的最下端与所述桅杆的最下端之间的第一距离l1,所述第二测距传感器用于获取所述钻杆的最下端与所述桅杆的最下端之间的第二距离l2;当所述动力头的最下端位于所述桅杆的最下端的上侧时,所述第一距离l1为正值;当所述钻杆的最下端位于所述桅杆的最下端的下侧时,所述第二距离l2为正值,当所述钻杆的最下端位于所述桅杆的最下端的上侧时,所述第二距离l2为负值;
16、上述步骤中若是,则所述钻杆的伸出节数为m之后,所述机锁钻杆控制方法还包括:
17、根据所述钻杆的型号信息得到所述钻杆的伸缩节数量、各伸缩节长度及各伸缩节中各加压台距离其所在伸缩节的最上端的加压台距离信息;
18、获取所述钻杆的伸出节数m,计算所有处于伸出状态的伸缩节的总长度信息与最近伸出的伸缩节的长度信息的长度差值信息;
19、计算所述第一距离l1与所述第二距离l2相加的总距离信息;
20、将所述长度差值信息分别与最近伸出的伸缩节中所有加压台距离信息相加;得到最近伸出的伸缩节中各加压台距离钻杆最低端的第三距离信息l3;
21、定义最近伸出的伸缩节中加压台的数量为p,p为大于或等于1的正整数,最近伸出的伸缩节中各加压台距离钻杆最低端的第三距离信息l3由小到大依次为:l31、l32、……l3p;
22、判断所述总距离信息是否等于所述第三距离信息l3中的任意一者,若是,则所述动力头位于所述第三距离信息l3与所述总距离信息相等的一者所对应的加压台处;若否,则进入下一步;
23、判断所述总距离信息是否位于所述第三距离信息l3中由小到大依次排列的任意两个距离l3f、l3f+1之间,l3f、l3f+1为所述第三距离信息l3中相邻的两者,若是,则所述动力头位于l3f所对应的加压台与所述l3f+1所对应的加压台之间;
24、计算所述动力头距离l3f所对应的加压台的第四距离l4,所述第四距离l4为所述总距离信息与l3f的差值;计算所述动力头距离l3f+1所对应的加压台的第五距离l5,所述第五距离l5为所述总距离信息与l3f+1的差值。
25、可选地,各伸缩节的长度依次为:lz1、lz2、lz3、……lzn;
26、所述机锁钻杆控制方法还包括:
27、计算所述第一距离l1与所述第二距离l2相加的总距离信息;
28、计算所有处于伸出状态的伸缩节的总长度信息以及所述总长度信息与最近伸出的伸缩节的长度信息的长度差值信息;
29、根据所述总距离信息大于所述总长度信息与最近伸出的伸缩节的长度信息的长度差值信息,且所述总距离信息小于所有处于伸出状态的伸缩节的总长度信息,得到所述钻杆的伸出节数;
30、判断所述第二拉力信息gd等于所述钻杆中处于伸出状态的所有伸缩节的第二总质量、所述第一拉力信息gz等于所述钻杆中处于未伸出状态的所有伸缩节的第一总质量是否均不成立,若是,则所述钻杆处于带杆状态,若否,则所述钻杆处于无带杆状态。
31、一种监控模拟系统,用于实施上述任一项所述的机锁钻杆控制方法,所述监控模拟系统包括:
32、第一测力检测单元,用于获取主卷扬的第一拉力信息gz;
33、第二测力检测单元,用于获取动力头卷扬的第二拉力信息gd;
34、数据存储单元,用于存储钻杆的型号信息、伸缩节数量、各伸缩节重量、各伸缩节长度及各伸缩节中各加压台距离其所在伸缩节的最上端的加压台距离信息;
35、第一控制器,用于根据所述第一拉力信息gz、所述第二拉力信息gd、所述钻杆的伸缩节数量、各伸缩节重量得到所述钻杆的伸出节数;并根据所述第一拉力信息gz、处于未伸出状态的所有伸缩节的第一总质量、所述第二拉力信息gd、处于伸出状态的所有伸缩节的第二总质量判断所述钻杆是否处于带杆状态。
36、可选地,还包括第一显示器,所述第一显示器设置有用于显示所述钻杆处于带杆状态的第一显示标识及用于显示所述钻杆处于未带杆状态的第二显示标识。
37、可选地,还包括警示器,所述警示器用于在所述钻杆处于带杆状态时发出警示信息。
38、可选地,还包括第二控制器,所述第二控制器用于根据所述第二拉力信息gd、所述各伸缩节重量、所述第一拉力信息gz计算得到所述钻杆的伸出节数。
39、可选地,还包括:
40、第一测距单元,用于获取所述动力头的最下端与所述桅杆的最下端之间的第一距离l1;
41、第二测距单元,用于获取所述钻杆的最下端与所述桅杆的最下端之间的第二距离l2;
42、第三控制器,用于根据所述第一距离l1、所述第二距离l2、所述钻杆的伸缩节数量、各伸缩节长度及各伸缩节中各加压台距离其所在伸缩节的最上端的加压台距离信息得到动力头与相邻的加压台的距离信息。
43、可选地,还包括第二显示器,所述第二显示器用于显示所述动力头与相邻的加压台的距离信息。
44、一种工程机械,包括上述任一项所述的监控模拟系统。
45、在使用本发明提供的机锁钻杆控制方法的过程中,首先,通过第一测力传感器获取主卷扬所承载的第一拉力信息gz,通过第二测力传感器获取动力头卷扬所承载的第二拉力信息gd;根据钻杆的型号信息得到钻杆的伸缩节数量、各伸缩节重量;根据第一拉力信息gz、第二拉力信息gd、钻杆的伸缩节数量、各伸缩节重量得到钻杆的伸出节数;判断第一拉力信息gz等于钻杆中处于未伸出状态的所有伸缩节的第一总质量、第二拉力信息gd等于钻杆中处于伸出状态的所有伸缩节的第二总质量是否同时成立,若是,则钻杆处于无带杆状态,若否,则钻杆处于带杆状态。
46、本发明提供的机锁钻杆控制方法在实际实施的过程中,可以对钻杆是否处于带杆状态作出判断,及时发现钻杆处于带杆状态的信息,避免带杆状态的解锁操作,提高设备运行的安全性。
47、此外,本发明还提供了一种用于实施上述机锁钻杆控制方法的监控模拟系统及包括上述监控模拟系统的工程机械。