基于人工智能的掘进工作面超掘监控预警方法及系统与流程
本发明涉及掘进机监控预警,尤其涉及基于人工智能的掘进工作面超掘监控预警方法及系统。
背景技术:
1、隧道掘进机在进行挖掘隧道时,经常会出现超出预设挖掘范围的现象。当出现超出挖掘范围时,不仅会影响项目的进度,同时还会影响工程质量。
2、现有专利申请文件cn116241265a展示了悬臂式掘进机超掘预警装置、方法、系统、设备及介质,该专利文件是通过截割头相对于巷道的位姿来判断截割头是否超掘,该专利文件中的超掘预警方法是在已经出现超掘现象时,才能进行预警。已经出现超掘时,说明超掘损失已经产生,此时进行预警虽然能够防止进一步超掘的发生,但是预警之前的超掘损失已经无法弥补。
3、为了解决事后超掘预警问题,需在未来有可能出现超掘时,就提前进行预警,以帮助掘进机操作人员及时调整,从而避免超掘现象的出现。为了提前掌握掘进机是否可能出现超掘情况,需预测未来时刻的挖掘速度,进而获取未来时刻的挖掘位置。
4、卡尔曼滤波算法作为一种常用的预测算法,其可用于未来时刻的挖掘速度的预测。在利用卡尔曼滤波算法进行预测之前,需要初始化一个初始预测误差,基于初始预测误差进行预测模型拟合。传统多随机初始化一个非零值作为初始预测误差,这种设置初始预测误差的方式,会导致预测模型拟合速度较慢以及预测模型拟合准确性较低。
技术实现思路
1、为了解决预测模型拟合速度较慢和预测模型拟合准确性较低的问题,本发明提供基于人工智能的掘进工作面超掘监控预警方法及系统。
2、第一方面,本发明提供基于人工智能的掘进工作面超掘监控预警方法,包括:
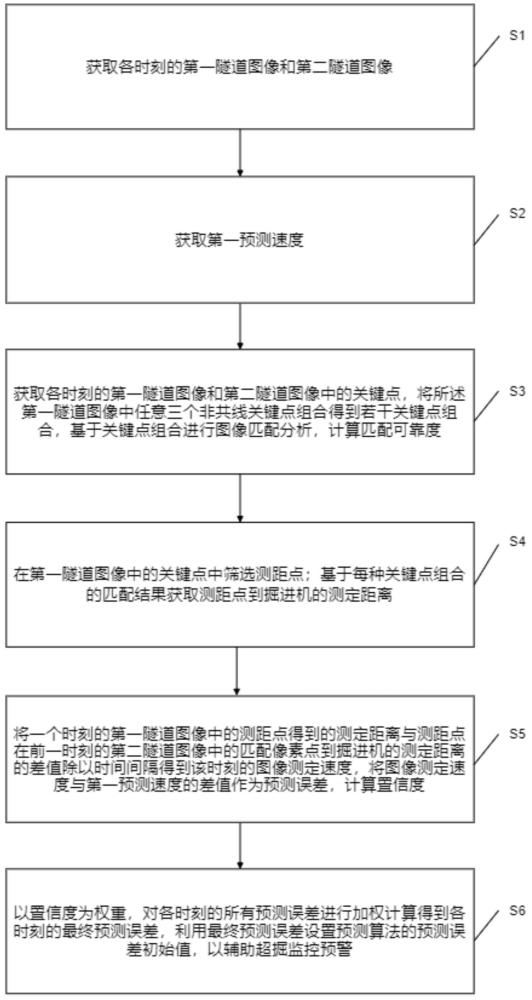
3、采集各时刻的第一隧道图像和第二隧道图像;
4、利用卡尔曼滤波算法的状态转移方程获取各时刻的第一预测速度;
5、获取各时刻的第一隧道图像和第二隧道图像中的关键点,将所述第一隧道图像中任意三个非共线关键点组合得到若干关键点组合,基于关键点组合进行图像匹配分析,计算匹配可靠度;
6、在第一隧道图像中的关键点中筛选测距点;基于每种关键点组合的匹配结果获取测距点到掘进机的测定距离;将一个时刻的第一隧道图像中的测距点得到的测定距离与测距点在前一时刻的第二隧道图像中的匹配像素点到掘进机的测定距离的差值除以时间间隔得到该时刻的图像测定速度,将图像测定速度与第一预测速度的差值作为预测误差,计算置信度,所述置信度与匹配可靠度正相关,与测距点的匹配偏差负相关;
7、以置信度为权重,对各时刻的所有预测误差进行加权计算得到各时刻的最终预测误差,利用最终预测误差设置卡尔曼滤波算法的预测误差初始值,以辅助超掘监控预警。
8、本发明通过对获取图像测定速度过程中的图像匹配准确性进行分析,来判断图像匹配误差对图像测定速度准确性的影响,从而得到相对准确的图像测定速度,从而可以将相对准确的图像测定速度作为第一预测速度的比对对象得到相对准确的预测误差,从而给预测算法提供准确的预测误差初始值,为进行准确和快速预警分析提供基础。
9、优选的,所述基于关键点组合进行图像匹配分析,包括:
10、根据关键点组合中三个关键点与第二隧道图像中的对应最相似像素点之间的位置关系,对第二隧道图像进行映射变换得到关键点组合下的第一隧道图像与第二隧道图像中各像素点之间的匹配关系;获取关键点组合下的相邻时刻的第一隧道图像中各像素点之间的匹配关系;
11、将关键点组合中三个关键点在前一时刻的第一隧道图像中的对应匹配像素点构成关键点组合的匹配像素点组合,获取匹配像素点组合下的前一时刻的第一隧道图像与第二隧道图像中各像素点的匹配关系。
12、本发明通过对以每个关键点组合为基准进行匹配分析,得到多种匹配结果,为后续进行图像测定速度分析提供更多的数据基础。
13、优选的,所述匹配可靠度的获取方法为:
14、将第一时刻的第一隧道图像中一个关键点作为分析关键点,所述匹配可靠度与一个关键点组合中各关键点的所在窗口的信息熵正相关,与基于该关键点组合的匹配关系下的一个分析关键点在第二隧道图像中的匹配像素点到最相似像素点之间的距离负相关,与基于该关键点组合的匹配关系下的分析关键点在前一时刻的第一隧道图像中的匹配像素点到最相似像素点之间的距离负相关,同时与基于匹配像素点组合的匹配关系下的分析关键点在前一时刻的第一隧道图像中匹配像素点的第二隧道图像中的匹配像素点到最相似像素点的距离也负相关。
15、本发明通过匹配像素点与最相似像素点的距离以及信息熵等来反映匹配可靠度,可以准确的描述每种匹配结果的准确性,为后续准确分析测定距离的准确性提供基础。
16、优选的,所述在第一隧道图像中的关键点中筛选测距点,包括:
17、计算测距点可能性;
18、将一个时刻的第一隧道图像中测距点可能性最大值对应的关键点作为该时刻的第一隧道图像中的测距点。
19、本发明通过在多个关键点中筛选出匹配准确性更高的关键点作为测距点,基于这种方式得到的测距点能够较为准确得到图像测定速度,为后续准确获取预测误差初始值,提供基础。
20、优选的,所述基于每种关键点组合的匹配结果获取测距点到掘进机的测定距离,包括:
21、基于一个关键点组合下的一个时刻的第一隧道图像与第二隧道图像中各像素点之间的匹配关系,利用双目测距算法得到该关键点组合下的该时刻的第一隧道图像中测距点到掘进机的测定距离。
22、优选的,所述测距点的匹配偏差的获取方法,包括:
23、所述测距点的匹配偏差与测距点在第二隧道图像中的匹配像素点到最相似像素点之间的距离正相关,与测距点在前一时刻的第一隧道图像中的匹配像素点到最相似像素点之间的距离正相关,同时与测距点在前一时刻的第一隧道图像中的匹配像素点的第二隧道图像中的匹配像素点到最相似像素点之间的距离也正相关。
24、本发明在分析匹配偏差时考虑了测距点的匹配像素点与最相似像素点的距离关系,来准确的描述出测距点的匹配误差情况,为后续判断图像测定速度的准确性提供基础。
25、优选的,所述利用最终预测误差设置卡尔曼滤波算法的预测误差初始值,包括:
26、将所有时刻的最终预测误差的均值作为综合预测误差,将综合预测误差作为卡尔曼滤波算法的预测误差初始值。
27、优选的,所述以辅助超掘监控预警,包括:
28、获取掘进机在每个时刻的gps定位数据,将每个时刻的gps定位数据与前一时刻的gps定位数据作差得到每个时刻的定位测定速度,基于所有时刻的定位测定速度,利用卡尔曼滤波算法进行预测分析得到未来时刻的第二预测速度,将未来时刻与当前时刻的时间差值乘以第二预测速度,再加上当前时刻的gps定位数据得到未来时刻的掘进位置;
29、判断未来时刻的掘进位置是否在设计范围内,如果不在设计范围内,则发出预警警报。
30、优选的,所述利用卡尔曼滤波算法的状态转移方程获取各时刻的第一预测速度,包括:
31、利用卡尔曼滤波算法,根据掘进机的输出功率构建状态转移方程,将各时刻的输出功率输入到状态转移方程中得到各时刻的第一预测速度。
32、第二方面,本发明提供基于人工智能的掘进工作面超掘监控预警系统,包括:处理器和存储器,所述存储器存储有计算机程序指令,当所述计算机程序指令被所述处理器执行时实现上述基于人工智能的掘进工作面超掘监控预警方法。
33、通过采用上述技术方案,将上述的基于人工智能的掘进工作面超掘监控预警方法生成计算机程序,并存储于存储器中,以被处理器加载并执行,从而根据存储器及处理器制作终端设备,方便使用。
34、本发明具有以下技术效果:
35、本发明通过对获取图像测定速度过程中的图像匹配准确性进行分析,来判断图像匹配误差对图像测定速度准确性的影响,从而得到相对准确的图像测定速度,从而可以将相对准确的图像测定速度作为第一预测速度的比对对象得到相对准确的预测误差,从而给预测算法提供准确的预测误差初始值,进而为预测算法快速准确的拟合出预测模型提供基础。以辅助快速准确的预警分析。
- 还没有人留言评论。精彩留言会获得点赞!