餐厨垃圾车的液压系统及投料控制方法与流程
1.本发明涉及餐厨垃圾车的液压系统及投料控制方法。
背景技术:
2.餐厨垃圾车主要用于收集和运输城市食品垃圾(泔水)、生活垃圾等,目前餐厨垃圾车的卸料方式主要有两种,一种是推铲卸料,卸料时打开后门,利用推铲向后移动进行卸料,另一种是密封卸料,卸料时后门关闭,打开后门上的闸板,然后启动螺旋输送机构和推铲,将垃圾从闸板处的排料口排出箱体。
3.例如授权公告号为cn202729065u的中国实用新型专利所公开的一种餐厨垃圾车,包括底盘和设置在底盘上的垃圾箱,垃圾箱包括箱体,箱体顶部设置有装料口、后部设置有后门、侧部设置有提升机构,箱体内设置有用于将垃圾进行压缩和排出的推铲,后门的底部设置有螺旋输送装置和闸板,后门处还设置有在后门关闭后将后门锁紧的锁紧装置。
4.现有的这种餐厨垃圾车,一般是通过液压系统来控制各个机构的动作,例如提升机构是通过提升油缸来控制的,螺旋输送装置是通过液压马达来驱动的,其他的还有控制后门开闭的后门油缸、控制推铲动作的推铲油缸、控制锁紧装置动作的锁紧油缸以及控制闸板开闭的闸板油缸。
5.其中,在垃圾投料时,需要将垃圾桶挂在提升机构上,通过提升油缸来控制提升机构将垃圾桶内的垃圾从装料口投入箱体内,为了保证垃圾能够得到有效的压缩和排出,投料之前必须使推铲先缩回。另外,作为箱体上可能存在密封不严而导致垃圾泄漏的后门以及闸板来说,在投料之前,也需要保证它们已经完全关闭,可以说这些都是投料之前的准备工作。然而目前,一般只能由人工逐一检查,并分别控制推铲油缸、后门油缸、锁紧油缸以及闸板油缸动作,使推铲、后门以及闸板均处于可投料状态,这样就增加了操作人员的工作,而且操作比较麻烦。
6.即便是后门上未设置闸板的餐厨垃圾车,在进行垃圾投料之前,也应该保证后门处于关闭的密封状态,目前这些准备工作皆由人工来控制,操作比较麻烦。
技术实现要素:
7.本发明的目的在于提供一种适用于不带闸板的餐厨垃圾车的液压系统,以解决现有技术中在垃圾投料前需要人工检查和控制推铲、后门运动到位而导致操作繁琐的问题;本发明的目的还在于提供一种适用于不带闸板的餐厨垃圾车的投料控制方法,以解决现有技术中在垃圾投料前需要人工检查和控制推铲、后门运动到位而导致操作繁琐的问题;本发明的目的还在于提供一种适用于带有闸板的餐厨垃圾车的液压系统,以解决现有技术中在垃圾投料前需要人工逐个检查和控制推铲、后门以及闸板运动到位而导致操作繁琐的问题;本发明的目的还在于提供一种适用于带有闸板的餐厨垃圾车的投料控制方法,以解决现有技术中在垃圾投料前需要人工逐个检查和控制推铲、后门以及闸板运动到位而导致操作繁琐的问题。
8.为实现上述目的,本发明中餐厨垃圾车的液压系统采用如下技术方案:餐厨垃圾车的液压系统,包括:液压泵;进油管路,与液压泵的出油口连通;执行部件,执行部件包括用于与推铲连接的推铲油缸、用于与后门连接的后门油缸、用于与垃圾桶提升机构连接的提升油缸;控制部件,通过进油管路与液压泵连通,且与对应的执行部件连接,控制部件包括控制推铲油缸动作的推铲控制阀、控制后门油缸动作的后门控制阀、控制提升油缸动作的提升控制阀;餐厨垃圾车的液压系统还包括:压力传感器,连接在进油管路上,用于检测进油管路上的压力信号;控制器,与压力传感器连接,用于接收所述压力信号;其中,提升控制阀为手动控制阀,推铲控制阀和后门控制阀均为与控制器连接而由控制器控制启闭的电磁阀;在控制器控制下,餐厨垃圾车的液压系统的投料过程包括以下步骤:第一步,以一定顺序将推铲控制阀和后门控制阀排列为第一阀门和第二阀门;由控制器控制第一阀门开启,开启后由压力传感器检测进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第一阀门关闭,所述设定值与第一阀门控制的执行部件动作到位后进油管路中的油压相对应;第二步,在第一阀门关闭后,由控制器控制第二阀门开启,开启后由压力传感器检测进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第二阀门关闭,所述设定值与第二阀门控制的执行部件动作到位后进油管路中的油压相对应;第三步,在第一阀门和第二阀门依次打开、关闭后,由控制器发出警示信号,以提醒操作人员可以手动控制提升控制阀进行垃圾投料操作;或者,在第一阀门和第二阀门依次打开、关闭后,由控制器控制提升控制阀和进油管路之间串接的开断电磁阀打开,以接通提升控制阀,使操作人员可以手动控制提升控制阀进行垃圾投料操作。
9.上述技术方案的有益效果在于:通过设置压力传感器和控制器,由控制器按照一定的顺序依次打开推铲控制阀和后门控制阀,打开过程中根据压力传感器检测到的压力信号,使每一个阀门都是在压力信号高于设定值时关闭,然后再打开下一个阀门,直至两个阀门均通过启闭分别控制推铲油缸和后门油缸动作到位,此时控制器会发出警示信号,从而提醒操作人员推铲已经回缩到位、后门已经关闭到位,可以手动控制提升控制阀进行垃圾投料操作,或者,控制器接通提升控制阀,此时操作人员才可以控制提升控制阀进行垃圾投料操作,这样的设置是为了避免推铲油缸和后门油缸还没有动作到位的情况下,操作人员即手动操作提升控制阀。
10.整个过程都是由压力传感器和控制器配合来实现的,无需人工逐个检查和控制,节省了操作人员的工作,作业方式更加简单方便。
11.进一步的,为了方便液压系统的卸荷,并简化管路连接,所述开断电磁阀为具有中位卸荷机能的三位四通电磁阀。
12.进一步的,为了确保后门在关闭后,不会因为误操作或者垃圾的挤压而开启,同时
方便控制,所述执行部件还包括用于与锁紧装置连接的锁紧油缸,锁紧油缸和后门油缸分别通过顺序阀与所述后门控制阀连接,以在关闭后门时,使锁紧油缸后于后门油缸动作,并在开启后门时,使锁紧油缸先于后门油缸动作。
13.进一步的,为了方便直观的观察进油管路中的压力,所述进油管路上还连接有测压接头,测压接头上安装有压力表。
14.为实现上述目的,本发明中餐厨垃圾车的投料控制方法采用如下技术方案:餐厨垃圾车的投料控制方法,包括以下步骤:第一步,以一定顺序将液压系统中的推铲控制阀和后门控制阀排列为第一阀门和第二阀门;由控制器控制第一阀门开启,开启后由压力传感器检测液压系统的进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第一阀门关闭,所述设定值与第一阀门控制的执行部件动作到位后进油管路中的油压相对应;第二步,在第一阀门关闭后,由控制器控制第二阀门开启,开启后由压力传感器检测液压系统的进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第二阀门关闭,所述设定值与第二阀门控制的执行部件动作到位后进油管路中的油压相对应;第三步,在第一阀门和第二阀门依次打开、关闭后,由控制器发出警示信号,以提醒操作人员可以手动控制提升控制阀进行垃圾投料操作;或者,在第一阀门和第二阀门依次打开、关闭后,由控制器控制提升控制阀和进油管路之间串接的开断电磁阀打开,以接通提升控制阀,使操作人员可以手动控制提升控制阀进行垃圾投料操作。
15.上述技术方案的有益效果在于:由控制器按照一定的顺序依次打开推铲控制阀和后门控制阀,打开过程中根据压力传感器检测到的压力信号,使每一个阀门都是在压力信号高于设定值时关闭,然后再打开下一个阀门,直至两个阀门均通过启闭分别控制对应的执行部件动作到位,此时控制器会发出警示信号,从而提醒操作人员推铲已经回缩到位、后门已经关闭到位,可以手动控制提升控制阀进行垃圾投料操作,或者,控制器接通提升控制阀,此时操作人员才可以控制提升控制阀进行垃圾投料操作,这样的设置是为了避免执行部件还没有动作到位的情况下,操作人员即手动操作提升控制阀。
16.整个过程都是由压力传感器和控制器配合来实现的,无需人工逐个检查和控制,节省了操作人员的工作,作业方式更加简单方便。
17.为实现上述目的,本发明中餐厨垃圾车的液压系统采用如下技术方案:餐厨垃圾车的液压系统,包括:液压泵;进油管路,与液压泵的出油口连通;执行部件,执行部件包括用于与推铲连接的推铲油缸、用于与闸板连接的闸板油缸、用于与后门连接的后门油缸、用于与垃圾桶提升机构连接的提升油缸;控制部件,通过进油管路与液压泵连通,且与对应的执行部件连接,控制部件包括控制推铲油缸动作的推铲控制阀、控制闸板油缸动作的闸板控制阀、控制后门油缸动作的后门控制阀、控制提升油缸动作的提升控制阀;餐厨垃圾车的液压系统还包括:压力传感器,连接在进油管路上,用于检测进油管路上的压力信号;
控制器,与压力传感器连接,用于接收所述压力信号;其中,提升控制阀为手动控制阀,推铲控制阀、闸板控制阀和后门控制阀均为与控制器连接而由控制器控制启闭的电磁阀;在控制器控制下,餐厨垃圾车的液压系统的投料过程包括以下步骤:第一步,以一定顺序将推铲控制阀、闸板控制阀以及后门控制阀排列为第一阀门、第二阀门和第三阀门;由控制器控制第一阀门开启,开启后由压力传感器检测进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第一阀门关闭,所述设定值与第一阀门控制的执行部件动作到位后进油管路中的油压相对应;第二步,在第一阀门关闭后,由控制器控制第二阀门开启,开启后由压力传感器检测进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第二阀门关闭,所述设定值与第二阀门控制的执行部件动作到位后进油管路中的油压相对应;第三步,在第二阀门关闭后,由控制器控制第三阀门开启,开启后由压力传感器检测进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第三阀门关闭,所述设定值与第三阀门控制的执行部件动作到位后进油管路中的油压相对应;第四步,在第一阀门、第二阀门和第三阀门依次打开、关闭后,由控制器发出警示信号,以提醒操作人员可以手动控制提升控制阀进行垃圾投料操作;或者,在第一阀门、第二阀门和第三阀门依次打开、关闭后,由控制器控制提升控制阀和进油管路之间串接的开断电磁阀打开,以接通提升控制阀,使操作人员可以手动控制提升控制阀进行垃圾投料操作。
18.上述技术方案的有益效果在于:通过设置压力传感器和控制器,由控制器按照一定的顺序依次打开推铲控制阀、闸板控制阀和后门控制阀,打开过程中根据压力传感器检测到的压力信号,使每一个阀门都是在压力信号高于设定值时关闭,然后再打开下一个阀门,直至三个阀门均通过启闭分别控制推铲油缸、闸板油缸和后门油缸动作到位,此时控制器会发出警示信号,从而提醒操作人员推铲已经回缩到位、闸板和后门已经关闭到位,可以手动控制提升控制阀进行垃圾投料操作,或者,控制器接通提升控制阀,此时操作人员才可以控制提升控制阀进行垃圾投料操作,这样的设置是为了避免推铲油缸、闸板油缸和后门油缸还没有动作到位的情况下,操作人员即手动操作提升控制阀。
19.整个过程都是由压力传感器和控制器配合来实现的,无需人工逐个检查和控制,节省了操作人员的工作,作业方式更加简单方便。
20.进一步的,为了方便液压系统的卸荷,并简化管路连接,所述开断电磁阀为具有中位卸荷机能的三位四通电磁阀。
21.进一步的,为了确保后门在关闭后,不会因为误操作或者垃圾的挤压而开启,同时方便控制,所述执行部件还包括用于与锁紧装置连接的锁紧油缸,锁紧油缸和后门油缸分别通过顺序阀与所述后门控制阀连接,以在关闭后门时,使锁紧油缸后于后门油缸动作,并在开启后门时,使锁紧油缸先于后门油缸动作。
22.进一步的,为了方便直观的观察进油管路中的压力,所述进油管路上还连接有测压接头,测压接头上安装有压力表。
23.为实现上述目的,本发明中餐厨垃圾车的投料控制方法采用如下技术方案:餐厨垃圾车的投料控制方法,包括以下步骤:第一步,以一定顺序将液压系统中的推铲控制阀、闸板控制阀以及后门控制阀排列为
第一阀门、第二阀门和第三阀门;由控制器控制第一阀门开启,开启后由压力传感器检测液压系统的进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第一阀门关闭,所述设定值与第一阀门控制的执行部件动作到位后进油管路中的油压相对应;第二步,在第一阀门关闭后,由控制器控制第二阀门开启,开启后由压力传感器检测液压系统的进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第二阀门关闭,所述设定值与第二阀门控制的执行部件动作到位后进油管路中的油压相对应;第三步,在第二阀门关闭后,由控制器控制第三阀门开启,开启后由压力传感器检测液压系统的进油管路上的压力信号,控制器接收压力信号,当压力信号高于设定值时控制器控制第三阀门关闭,所述设定值与第三阀门控制的执行部件动作到位后进油管路中的油压相对应;第四步,在第一阀门、第二阀门和第三阀门依次打开、关闭后,由控制器发出警示信号,以提醒操作人员可以手动控制提升控制阀进行垃圾投料操作;或者,在第一阀门、第二阀门和第三阀门依次打开、关闭后,由控制器控制提升控制阀和进油管路之间串接的开断电磁阀打开,以接通提升控制阀,使操作人员可以手动控制提升控制阀进行垃圾投料操作。
24.上述技术方案的有益效果在于:由控制器按照一定的顺序依次打开推铲控制阀、闸板控制阀和后门控制阀,打开过程中根据压力传感器检测到的压力信号,使每一个阀门都是在压力信号高于设定值时关闭,然后再打开下一个阀门,直至三个阀门均通过启闭分别控制对应的执行部件动作到位,此时控制器会发出警示信号,从而提醒操作人员推铲已经回缩到位、闸板和后门已经关闭到位,可以手动控制提升控制阀进行垃圾投料操作,或者,控制器接通提升控制阀,此时操作人员才可以控制提升控制阀进行垃圾投料操作,这样的设置是为了避免执行部件还没有动作到位的情况下,操作人员即手动操作提升控制阀。
25.整个过程都是由压力传感器和控制器配合来实现的,无需人工逐个检查和控制,节省了操作人员的工作,作业方式更加简单方便。
附图说明
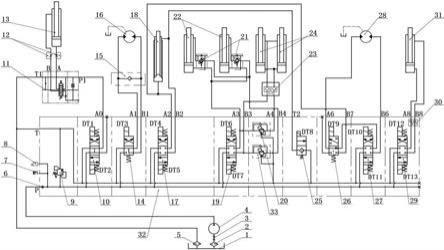
26.图1为本发明中一种餐厨垃圾车的液压系统的一个实施例的系统结构图;图2为本发明中一种餐厨垃圾车的投料控制方法的一个实施例的控制流程图。
27.图中:1.油箱;2.进油过滤器;3.截止阀;4.液压泵;5.回油过滤器;6.进油单向阀;7.测压接头;8.压力传感器;9.溢流阀;10.开断电磁阀;11.提升控制阀;12.单向节流阀;13.提升油缸;14.水泵马达控制阀;15.保护单向阀;16.水泵马达;17.推铲卸料控制阀;18.推铲油缸;19.后门控制阀;20.第一顺序阀;21.单向平衡阀;22.后门油缸;23.双向液压锁;24.锁紧油缸;25.第二密封卸料控制阀;26.第一密封卸料控制阀;27.螺旋马达控制阀;28.螺旋马达;29.闸板控制阀;30.双向液压锁;31.闸板油缸;32.控制阀组;33.第二顺序阀。
具体实施方式
28.本发明中一种餐厨垃圾车的液压系统的一个实施例如图1所示,本实施例中的餐厨垃圾车为带有闸板的餐厨垃圾车,其液压系统包括液压泵4、由多个控制部件组成的控制
阀组32、与各控制部件对应连接的执行部件,其中液压泵4通过变速箱取力器或电机提供动力,从油箱1中吸油,经吸油过滤器2及截止阀3到达液压泵4的进油口,然后从液压泵4的出油口通过外进油管路向控制阀组32提供压力油,控制阀组32内设置有内进油管路,外进油管路和内进油管路连通。
29.本实施例中的执行部件包括:用于与垃圾桶提升机构连接的提升油缸13、用于与清洗水泵连接的水泵马达16、用于与推铲连接的推铲油缸18、用于与后门连接的后门油缸22、用于与锁紧装置连接的锁紧油缸24、用于驱动螺旋输送搅龙转动的螺旋马达28、用于与闸板连接的闸板油缸31。
30.控制阀组32内的控制部件包括:进油单向阀6、溢流阀9、开断电磁阀10、水泵马达控制阀14、推铲卸料控制阀17、后门控制阀19、顺序阀20、第二密封卸料控制阀25、第一密封卸料控制阀26、螺旋马达控制阀27、闸板控制阀29、双向液压锁30。其中进油单向阀6起到动作停止时,防止压力油回流引起液压泵4反转的作用,溢流阀9实现对液压系统稳定压力、安全保护的功能。
31.控制阀组32外的控制部件包括:提升控制阀11、单向节流阀12、保护单向阀15、单向平衡阀21、双向液压锁23。
32.其中,开断电磁阀10、提升控制阀11、单向节流阀12与提升油缸13连接,控制提升油缸13的动作;水泵马达控制阀14和保护单向阀15与水泵马达16连接,控制水泵马达16的动作;推铲卸料控制阀17、第二密封卸料控制阀25、第一密封卸料控制阀26与推铲油缸18连接,实现推铲卸料和密封卸料两种卸料方式;后门控制阀19、第一顺序阀20与锁紧油缸24连接,后门控制阀19、第二顺序阀33与后门油缸22连接,第一顺序阀20和第二顺序阀33用于控制后门油缸22和锁紧油缸24的顺序动作,其中后门油缸上还连接有单向平衡阀21,锁紧油缸24上连接有双向液压锁23;螺旋马达控制阀27、第一密封卸料控制阀26与螺旋马达28连接,控制螺旋马达28的正转和反转;闸板控制阀29、双向液压锁30与闸板油缸31连接,控制闸板油缸31的动作。
33.如图1所示,开断电磁阀10、推铲卸料控制阀17、后门控制阀19、螺旋马达控制阀27、闸板控制阀29均为三位四通电磁换向阀,水泵马达控制阀14、第一密封卸料控制阀26为两位四通电磁换向阀,第二密封卸料控制阀25为两位两通电磁换向阀。
34.其中开断电磁阀10串接在内进油管路和提升控制阀11之间,开断电磁阀10为h型中位机能,不得电时为卸荷状态。当dt1得电时,压力油经开断电磁阀10的上位到达提升控制阀11,提升控制阀11为带有手柄的手动控制换向阀,通过操作提升控制阀11的手柄进行推或者拉,可以实现垃圾投料操作。当dt2得电时,压力油流入开断电磁阀10的下位,但由于下位的进油路最终被封死,所以压力油可以流入控制阀组下游的水泵马达控制阀14、推铲卸料控制阀17、后门控制阀19、螺旋马达控制阀27、闸板控制阀29等控制阀,也就是说,这些阀门想要动作,开断电磁阀10的dt2必须得电。
35.另外,控制阀组32内的内进油管路上还连接有压力传感器8和测压接头7,压力传感器8和测压接头7设置在控制阀组32的进油口处,位于进油单向阀6的下游。压力传感器8用于检测进油管路上的压力信号,测压接头7上安装有压力表(图中未示出),以直观显示进油口处的压力。
36.餐厨垃圾车的液压系统还包括与压力传感器8、开断电磁阀10、水泵马达控制阀
14、推铲卸料控制阀17、后门控制阀19、第二密封卸料控制阀25、第一密封卸料控制阀26、螺旋马达控制阀27、闸板控制阀29连接的控制器(图中未示出),其中压力传感器8具有一个较高的设定压力,当压力传感器8检测到进油管路上的压力信号高于设定压力值时,就会将该压力信号发送给控制器,控制器接收到该信号后,就会控制相应阀门的启闭。
37.控制器共有四种控制状态,分别是控制投料、控制推铲卸料、控制密封卸料以及控制清洗,下面对四种控制状态一一做以介绍。
38.首先是控制投料,该过程也即带有闸板的餐厨垃圾车的投料控制方法,具体是:在需要进行垃圾投料时,按下投料操作按钮,此时为了确保推铲已经回缩到位、后门和闸板已经关闭到位,首先进行动作的并不是提升油缸13,而是推铲油缸18、后门油缸22、锁紧油缸24以及闸板油缸31。
39.因此,当控制器处于控制投料状态时,首先是控制开断电磁阀10的dt2得电,然后推铲卸料控制阀17的dt5得电,压力油通过推铲卸料控制阀17的下位,经b2口进入推铲油缸18有杆腔,无杆腔通过a2口回油,完成缩回动作,当推铲缩回到位后,推铲油缸18不再动作,此后进油管路中的压力会升高,当压力传感器8检测到压力信号高于设定值时,即认为推铲缩回到位,此时压力传感器8会向控制器发出信号,由控制器来控制推铲卸料控制阀17的电磁铁失电,使其回到中位,从而关闭推铲卸料控制阀17。
40.接下来进行闸板密封动作,闸板控制阀29的dt12得电,压力油通过闸板控制阀29的上位,然后经双向液压锁30和a8口进入闸板油缸31的无杆腔,有杆腔通过b8口和双向液压锁30回油,完成闸板密封动作,当压力传感器8检测到压力信号高于设定值时,即认为闸板密封到位,压力传感器8向控制器发出信号,由控制器控制闸板控制阀29的电磁铁失电,使其回到中位,从而关闭闸板控制阀29。其中双向液压锁30是为了防止车辆行驶过程振动造成闸板油缸密封不严,起到防泄漏和锁紧的作用。
41.最后是后门关闭动作,后门控制阀19的dt6得电,压力油经过后门控制阀19的的上位后分为两路,一路经a3口首先进入后门油缸22的无杆腔,另一路在第一顺序阀20处暂时无法通过,当后门油缸22无杆腔的压力达到一定程度时,单向平衡阀21打开,后门油缸22的有杆腔开始回油,压力油经b4口回流至油箱中,后门油缸22伸出,伸出到位后油路中压力开始升高,直至达到第一顺序阀20的设定压力,使第一顺序阀20打开,然后压力油经a4口和双向液压锁23进入锁紧油缸24的无杆腔,有杆腔经双向液压锁23和b3口开始回油,锁紧油缸24伸出,带动锁紧装置将后门锁紧。当压力传感器8检测到压力信号高于设定值时,即认为后门关闭到位,且已经锁紧,此时压力传感器8向控制器发出信号,由控制器控制后门控制阀19的电磁铁失电,使其回到中位,从而关闭后门控制阀19。
42.其中,单向平衡阀21起到防止后门打开后因自重失速下落的作用,双向液压锁23让锁紧油缸24锁紧更加牢靠。
43.当推铲卸料控制阀17、闸板控制阀29以及后门控制阀19依次打开并关闭后,由控制器控制开断电磁阀的dt1得电,压力油通过开断电磁阀的上位,经a0口进入提升控制阀11,提升控制阀11中位卸荷,通过提升控制阀11手柄的推或拉动作,使压力油经单向节流阀12分别进入提升油缸13的无杆腔或有杆腔,实现垃圾投料动作。其中,单向节流阀12起到减缓垃圾桶升、降动作,实现平稳操作,防止垃圾或泔水溅出的作用。
44.在上述垃圾投料过程中,推铲卸料控制阀17作为首先开启和关闭的第一阀门,闸
板控制阀29作为随后开启和关闭的第二阀门,后门控制阀19作为最后开启和关闭的第三阀门,实际上在其他实施例中,这个顺序是可以改变的,例如可以将闸板控制阀29作为第一阀门,后门控制阀19作为第二阀门,推铲卸料控制阀17作为第三阀门,当然还可以将后门控制阀19第一阀门,推铲卸料控制阀17作为第二阀门,闸板控制阀29作为第三阀门,当然还可以有其他的排布顺序,根据需要可以进行调整,整个控制方法的控制流程图如图2所示。
45.此外,在上述垃圾投料过程中,压力传感器8具有一个设定值,只有当压力信号高于设定值时,压力传感器8才会向控制器发出压力信号,然后由控制器接收该信号并控制相应阀门的启闭,并且三个阀门均在压力信号高于同一设定值时关闭。在其他实施例中,设定值也可以是控制器的设定值,压力传感器检测进油管路上的压力信号,并实时将压力信号传递给控制器,当压力信号高于控制器的设定值时,控制器即控制相应的阀门启闭,并且在这种情况下,可以使控制器具有三个设定压力值,使每一个阀门对应的设定压力值不同。
46.以上是液压系统的垃圾投料过程,下面介绍两种卸料方式。
47.首先,当需要推铲卸料时,按下推铲卸料按钮,使控制器处于推铲卸料控制状态,此时分为以下几个步骤:第一步,后门打开。过程为:开断电磁阀10的dt2以及后门控制阀19的dt7得电,压力油经过电磁阀19的下位后分为两路,一路经b3口和双向液压锁23首先进入锁紧油缸24的有杆腔,另一路在第二顺序阀33处暂时无法通过,锁紧油缸24的无杆腔经双向液压锁23和a4口回油,锁紧油缸24缩回,缩回到位后锁紧装置解锁,当油路压力达到第二顺序阀33的设定压力时,第二顺序阀33打开,压力油经b4口和单向平衡阀21进入后门油缸22的有杆腔,无杆腔经a3口回油,后门油缸22缩回,后门打开,当压力传感器8检测到进油管路上的压力信号高于设定值时,即认为后门打开到位,此时压力传感器8向控制器发出信号,由控制器控制后门控制阀19的电磁铁失电,使其回到中位,从而关闭后门控制阀19。
48.第二步,推铲推出。过程为:推铲卸料控制阀17的dt4得电,压力油通过推铲卸料控制阀17的上位,经a2口进入推铲油缸18的无杆腔,有杆腔经b2口回油,推铲油缸18开始带动推铲推出,进行垃圾卸料作业,当压力传感器8检测进油管路上的压力信号高于设定值时,即认为推出到位,垃圾卸料完毕。
49.第三步,推铲缩回。推铲卸料控制阀17的dt5得电,该过程与上述垃圾投料过程中推铲缩回的过程相同,此处不再详述。
50.第四步,后门关闭。后门控制阀19的dt6得电,该过程与上述垃圾投料过程中后门关闭的过程相同,此处不再详述。至此所有卸料动作完成。
51.当需要密封卸料时,按下密封卸料按钮,使控制器处于密封卸料控制状态,此时分为以下几个步骤:第一步,后门关闭,保证后门的密封性,该过程与上述垃圾投料过程中后门关闭的过程相同,此处不再详述。
52.第二步,闸板打开。过程为:闸板控制阀29的dt13得电,压力油通过闸板控制阀29的下位,经双向液压锁30和b8口进入闸板油缸31有杆腔,无杆腔经a8口和双向液压锁30回油,闸板油缸31缩回,闸板打开,当压力传感器8检测到压力信号高于设定值时,即认为闸板打开到位。其中,双向液压锁30是为了使闸板油缸31密封关闭时更加可靠。
53.第三步,螺旋输送搅龙运转。过程为:螺旋马达控制阀27的dt11得电,与此同时,起
串联作用的第一密封卸料控制阀26和第二密封卸料控制阀25同时得电,即dt8和dt9同时得电,此时压力油通过螺旋马达控制阀27的下位,经b6口进入螺旋马达28的进油口,出油口的压力油经a6口进入第一密封卸料控制阀26的上位,后经过b7口最终进入推铲油缸18的无杆腔,有杆腔的液压油经t2口进入第二密封卸料控制阀25的上位后回到油箱,螺旋马达28带动螺旋输送搅龙运转,将垃圾从闸板处的排料口排出垃圾箱,同时推铲油缸18带动推铲推出,将垃圾推向箱体后部,完成垃圾的密封卸料。
54.当然,在上述过程中,当螺旋马达控制阀27的dt11得电时,也可以先不控制dt8和dt9得电,此时压力油通过螺旋马达28的出油口后,经a6口进入第一密封卸料控制阀26的下位,然后通过螺旋马达控制阀27直接回到油箱,此时仅有螺旋输送搅龙运转。当螺旋输送搅龙将垃圾箱后部的垃圾排出一部分之后,再控制dt8和dt9得电,使推铲将垃圾推向箱体后部。
55.卸料完毕后,需要对垃圾箱进行清洗,此时按下清洗操作按钮,使控制器处于清洗控制状态,过程是:开断电磁阀10的dt2和水泵马达控制阀14的dt3同时得电,压力油通过水泵马达控制阀14的上位,经a1口到达水泵马达16的进油口,出油口的压力油经b1口回到油箱,水泵马达16带动清洗水泵完成清洗作业,其中保护单向阀15起到当油路接反时,防止水泵马达16反转造成清洗水泵损坏的作用。
56.本发明液压系统的控制阀组为集成式设计,减少了管路连接和泄漏、降低了能量损失;系统可以在投料操作前,使推铲、后门以及闸板首先进行动作,确保它们都处在应该处于的位置,使垃圾投料更加方便、安全;另外在密封卸料前,也是首先进行后门的动作,确保后门密封效果,避免垃圾从后门的其他地方漏出,提高密封卸料的质量;两种卸料方式既可以满足郊区及农村常用卸料要求,提高了卸料效率,又能够满足城市小区无泄漏条件下的卸料要求;清洗操作方便对车辆箱体内、外的清洗要求,保证车辆干净、美观。同时该液压系统降低了用户的维护成本,提高了作业效率,具体经济性高、实用性强、性能可靠的优点。
57.本发明中另一种餐厨垃圾车的液压系统的实施例为:该餐厨垃圾车不带闸板,不具有密封卸料功能,其液压系统与上述实施例中液压系统的区别在于不包括闸板油缸、闸板控制阀、螺旋马达、螺旋马达控制阀、第一密封卸料控制阀以及第二密封卸料控制阀,其余系统组成均与上述实施例中的液压系统相同。
58.该液压系统的投料过程,也即该餐厨垃圾车的投料控制方法与上述实施例中的投料控制方法不同之处在于:仅需将推铲控制阀和后门控制阀以一定的顺序排列为第一阀门和第二阀门,此时只有两种排列方式,要么推铲控制阀作为第一阀门,要么后门控制阀作为第一阀门,由控制器控制推铲控制阀和后门控制阀依次打开和关闭,打开过程中根据压力传感器检测到的压力信号,使每一个阀门都是在压力信号高于设定值时关闭,然后再打开下一个阀门,直至两个阀门均通过启闭分别控制推铲油缸和后门油缸动作到位,然后再由控制器控制开断电磁阀打开,以接通提升控制阀,使操作人员可以手动控制提升控制阀进行垃圾投料操作。
59.在上述两种餐厨垃圾车的液压系统的其他实施例中,执行部件也可以不包括水泵马达,也即餐厨垃圾车不具备自动清洗功能,此时可以采用外部水源由人工进行清洗。
60.在上述两种餐厨垃圾车的液压系统的其他实施例中,测压接头和压力传感器也可以连接在外进油管路上。
61.在上述两种餐厨垃圾车的液压系统的其他实施例中,进油管路上也可以不连接测压接头,此时只通过压力传感器来检测压力。
62.在上述两种餐厨垃圾车的液压系统的其他实施例中,锁紧油缸和后门油缸也可以不是通过顺序阀与后门控制阀连接,而是另外设置有控制锁紧油缸动作的锁紧控制阀,来实现对锁紧油缸的单独控制。
63.在上述两种餐厨垃圾车的液压系统的其他实施例中,执行部件也可以不包括锁紧油缸,此时只通过后门油缸保证后门的关闭效果。
64.在上述两种餐厨垃圾车的液压系统的其他实施例中,开断电磁阀也可以不具有中位卸荷机能,例如开断电磁阀只是一个两位四通电磁阀,其上位可以接通提升控制阀,下位可以使压力油进入推铲卸料控制阀、后门控制阀等阀门,此时可以在进油管路上另外接一个卸荷阀,以保证系统的卸荷功能。
65.在上述两种餐厨垃圾车的液压系统的其他实施例中,提升控制阀和进油管路之间也可以不串接开断电磁阀,提升控制阀直接与进油管路连接,此时控制器上需要有指示灯或者蜂鸣器,当第一阀门和第二阀门依次打开、关闭后(不带闸板的餐厨垃圾车),或者是当第一阀门、第二阀门和第三阀门依次打开、关闭后(带闸板的餐厨垃圾车),由控制器控制指示灯亮起或者蜂鸣器响起,给出警示信号,从而提醒操作人员可以手动控制提升控制阀进行垃圾投料操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1