使用壁耦合主动控制表面曳力的系统和方法与流程
使用壁耦合主动控制表面曳力的系统和方法
1.相关申请的交叉引用
2.本公开要求于2018年11月6日提交的标题为“systems and methods for active control of surface drag using wall coupling”的美国临时申请no.62/756,456的优先权,其全部公开内容出于所有目的通过引用并入本文。
技术领域
3.本公开一般而言涉及表面之上的流体流动的领域。更具体而言,本公开涉及用于主动控制表面曳力的系统和方法。
背景技术:
4.表面曳力(surface drag)是与移动通过流体的物体的相对运动相反作用的力。与移动流体(包括但不限于空气、水和地面运输平台、通过空气或水移动的旋转或平移叶片以及通过管和通道运输的流体)接触的各种材料主体经历某种程度的表面曳力,这会导致速度更慢和燃油效率更低。
技术实现要素:
5.一个实施例涉及一种流体控制系统,该流体控制系统包括在至少第一方向和第二方向上覆盖主体的可变形表面。第一方向与第二方向正交。可变形表面包括面向主体的底侧和与底侧相对的顶侧。流体控制系统还包括在可变形表面和主体之间的至少一个变形器。该至少一个变形器被配置为通过选择性地使表面的顶侧变形来改变在可变形表面之上流动的流体的边界层。
6.另一个实施例涉及一种方法,该方法包括使用传感器来测量在表面之上流动的流体的参数。控制信号由控制电路生成以修改参数,并且这个控制信号由控制电路传输到至少一个变形器。然后该至少一个变形器选择性地使表面的顶侧变形以改变流体的参数。
7.另一个实施例涉及一种流体控制系统,该流体控制系统包括在至少第一方向和第二方向上覆盖主体的表面。第一方向与第二方向正交。该表面包括面向主体的底侧和与底侧相对的顶侧。流体控制系统还包括在表面的顶侧上的至少一个分离的可移动区段。该至少一个分离的可移动区段被配置为通过沿着表面的顶侧移动来改变在表面之上流动的流体的边界层。
8.另一个实施例涉及一种方法,该方法包括使用传感器来测量在表面之上流动的流体的参数。控制信号由控制电路生成以修改参数,并且这个控制信号由控制电路传输到表面的顶侧上的至少一个分离的可移动区段。然后该至少一个分离的可移动区段被移动以改变流体的参数。
9.另一个实施例涉及一种系统。该系统包括:表面,该表面具有在表面之上流动的流体,流体包括在表面的第一距离内的第一湍流流态(flow regime)和距表面至少第二距离的第二湍流流态,第二距离大于该第一距离;致动器,耦合到表面以使表面相对于流体移
动;以及控制器,该控制器使致动器使表面以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数移动。
10.另一个实施例涉及一种方法。该方法包括将致动器耦合到表面,该表面具有在表面之上流动的流体,流体包括在表面的第一距离内的第一湍流流态和距壁至少第二距离的第二湍流流态,第二距离大于第一距离,并且由控制器使致动器使表面相对于流体以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数移动。
11.另一个实施例涉及一种方法。该方法包括识别在表面上流动的流体的至少一种流动方式的顺流(streamwise)长度标度(length scale)。该方法包括识别至少一个流态的对流(convective)时间标度(time scale)。该方法包括引起以下中的至少一个(1)基于顺流长度标度和对流时间标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于顺流长度标度和对流时间标度使得至少一个流态运动。
12.另一个实施例涉及一种系统。该系统包括表面,该表面具有在表面之上流动的流体,流体包括具有顺流长度标度和对流时间标度的至少一个流态。该系统包括控制器,该控制器引起以下中的至少一个(1)基于顺流长度标度和对流时间标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于顺流长度标度和对流时间标度使得至少一个流态运动。
13.另一个实施例涉及一种方法。该方法包括识别在表面上流动的流体的至少一个流态的顺流长度标度。该方法包括引起以下中的至少一个(1)基于顺流长度标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于顺流长度标度使得至少一个流态运动。
14.另一个实施例涉及一种系统。该系统包括具有在其上流动的流体的表面,该流体包括具有顺流长度标度的至少一个流态。该系统包括控制器,该控制器引起以下中的至少一个(1)基于顺流长度标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于顺流长度标度使得至少一个流态运动。
15.另一个实施例涉及一种方法。该方法包括识别在表面上流动的流体的至少一个流态的顺流长度标度。该方法包括提供表面的一个或多个结构,该一个或多个结构具有与顺流长度标度对应的结构长度标度。
16.另一个实施例涉及一种系统。该系统包括具有在其上流动的流体的表面,流体包括具有顺流长度标度的至少一个流态。该系统包括与表面耦合的一个或多个结构,该一个或多个结构具有与顺流长度标度对应的结构长度标度。
17.另一个实施例涉及一种方法。该方法包括识别在表面上流动的流体的至少一个流态的对流时间标度。该方法包括引起以下中的至少一个(1)基于对流时间标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于对流时间标度使得至少一个流态运动。
18.另一个实施例涉及一种系统。该系统包括表面,该表面具有在表面之上流动的流体,流体包括具有对流时间标度的至少一个流态。该系统包括控制器,该控制器引起以下中的至少一个(1)基于对流时间标度使表面的至少一部分运动以修改处于流体的至少一个流态的流体流,或者(2)基于对流时间标度使得至少一个流态运动。
19.另一个实施例涉及一种方法。该方法包括识别在表面上流动的流体的至少一个流
态的对流时间标度。该方法包括提供表面的一个或多个结构,该一个或多个结构具有与对流时间标度对应的结构长度标度。
20.另一个实施例涉及一种系统。该系统包括表面,该表面具有在表面之上流动的流体,流体包括具有对流时间标度的至少一个流态。该系统包括与表面耦合的一个或多个结构,该一个或多个结构具有与对流时间标度对应的结构长度标度。
21.本发明内容仅仅是说明性的并且不以任何方式进行限制。仅由权利要求书限定的本文描述的设备和/或过程的其它方面、发明性特征和优点将在结合附图进行的本文阐述的详细描述中变得显而易见,其中相似的附图标记指代相似的元素。
附图说明
22.图1是根据本公开的实施例的使用可变形表面的流体控制系统的示意图。
23.图2是根据本公开的实施例的使用可变形表面的流体控制系统的框图。
24.图3描绘了相对于表面的多个流态的示例。
25.图4描绘了相对于表面的单个流态的示例。
26.图5描绘了与通过管的流体流相关联的致动器的示例。
27.图6描绘了与在静止或可移动平台上的流体流相关联的致动器的示例。
28.图7是根据本公开的实施例的使用可变形表面和电磁变形器的流体控制系统的示意图。
29.图8是根据本公开的实施例的使用可变形表面和压电变形器的流体控制系统的示意图。
30.图9是根据本公开的实施例的在流体控制系统中使用的传感器的示意图。
31.图10是根据本公开实施例的用于主动控制表面曳力的方法的流程图。
32.图11是根据本公开的实施例的使用分离的可移动区段的流体控制系统的示意图。
33.图12是根据本公开的实施例的使用分离的可移动区段的流体控制系统的框图。
34.图13是根据本公开的实施例的使用通过带移动的分离的可移动区段的流体控制系统的示意图。
35.图14是根据本公开的实施例的使用通过弹簧移动的分离的可移动区段的流体控制系统的示意图。
36.图15是根据本公开的实施例的使用互锁可移动区段的流体控制系统的示意图。
37.图16是根据本公开的实施例的用于主动控制表面曳力的方法的流程图。
38.图17是根据本公开的实施例的使用壁耦合主动控制表面曳力的流体控制系统的框图。
39.图18是根据本公开的实施例的使用壁耦合主动控制表面曳力的方法的流程图。
具体实施方式
40.在转向详细图示示例性实施例的附图之前,应当理解的是,本公开不限于本描述中阐述或在附图中示出的细节或方法。还应当理解的是,本文所使用的术语仅出于描述的目的,而不应当被认为是限制性的。
41.总体上参考附图,本文所述的系统和方法可以被用于主动控制表面上的曳力。曳
力(drag)是与任何物体相对于周围流体移动的相对运动相反作用的力。曳力操纵技术在提高涉及流体在表面之上流动的系统的性能方面具有广泛的应用。例如,可以以各种方式相对于物体和流体彼此相对移动来提高效率和速度,包括涡轮机、风扇叶片、螺旋桨、管流、航空运输,包括商用飞机、军用飞机、火箭、无人驾驶飞行器、以及通用航空。减小曳力还可以提高地面运输(诸如火车、汽车和拖拉机拖车中)的效率。减小曳力同样可以使包括海运、个人划船和海底运输在内的水上运输受益。减小曳力还可以提升通过诸如天然气或石油管道中之类的管输送流体时的效率。在广泛的雷诺(reynolds)数范围内,操纵曳力可以是有价值的,包括通过水的海运所经历的相对高的雷诺数和无人驾驶航空器所经历的相对低的雷诺数。选择性地增加曳力对于平台(诸如风力涡轮机和船用螺旋桨)的制动、转向和其它控制也是有用的。能够主动控制物体的表面曳力不仅允许在最需要效率或速度时将表面曳力最小化,而且还允许通过选择性地增加表面曳力来获得更好的转向和制动能力。
42.包括空气在内的各种流体可以充当粘性流体。使用空气作为流体的示例,在空气中移动的物体(诸如上面提到的平台)可以收集一组空气颗粒,当物体移动时,该物体趋向于拉动空气颗粒。由于分子吸引力,靠近物体表面的空气颗粒倾向于以与物体大致相同的速度移动。当平板、机翼或其它物体以给定的相对速度在空气的自由气流中移动时,粘性粘附会导致速度低于自由气流速度的空气边界层在物体表面附近形成。边界层可以是围绕物体的空气层,其中最靠近物体的分子层的相对速度为零或接近零,并且其中在距物体相继远离的点处的相对速度改变,一般随着距离而增加,直到接近自由气流的速度为止(例如,增加可以不是单调的),此时达到边界层的外部极限。例如,对于机翼,边界层可以包括机翼和包围机翼的空气质量之间的界面。与物体的尺寸维度相比,边界层可以相对小。
43.壁附近(例如,表面附近)的速度的梯度影响粘性曳力。例如,随着速度梯度增加(减小),粘性曳力会增加(减小)。速度的湍流波动之类的扰动会影响壁附近的速度梯度,诸如增加速度梯度并进而增加曳力。随着雷诺数增加,更可能存在湍流,因此,在雷诺数更高时,湍流运动对曳力的贡献会增加。
44.曳力也可以由流中的小扰动引起,从而阻碍表面附近的流动。此类扰动的示例包括但不限于tollmein
‑
schlichting波。这些小扰动可能不会随着雷诺数的增加而自然消散,这会导致引起扰动增大的相互作用,从而导致湍流运动和涡流的发展,其长度范围和时间范围会跨越很大。扰动可以从表面增长并发展到外边界层,这会引起持续扰动。本解决方案可以通过控制自由气流的速度与边界层的不同区段的相对速度之间的差异来控制表面曳力,方法是中断表面附近的扰动的生成和/或这些扰动的下游生长。具体而言,本解决方案可以控制壁附近条纹的形成和生长,这些壁附近条纹是长度为10η至100000η(或在一些实施例中为100η至10000η)的扰动(例如,顺流长度标度),其中η为粘性长度标度,其等于运动学粘度ν除以壁剪切应力τ
w
除以流体密度ρ的平方根(参见下面的等式1),并且是具有持续时间10η'至10000η'的时间标度(例如,对流时间标度)的扰动,其中η'是粘性时间标度,其等于运动学粘度ν除以壁剪切应力τ
w
除以流体密度ρ(参见下面的等式2)。湍流可以具有10η至100000η的尺寸(例如,长度)。
45.[0046][0047]
边界层中的湍流可以有助于曳力。湍流的边界层可以具有大量涡流,这些涡流将动量从边界层的较快移动的外部部分传递到更靠近表面的相对较慢的部分。照此,湍流边界层可以比层流边界层具有更大的表面摩擦,层流边界层具有更平滑的流,并且一般没有这些涡流。使边界层的湍流较小可以被用于减小曳力,反之,使边界层的湍流较大可以被用于增加曳力。本解决方案可以通过控制边界层的湍流水平来控制表面曳力。
[0048]
本解决方案的系统和方法可以通过在覆盖主体的表面中产生变形来操纵边界层。这在垂直于流体流的表面上产生运动(例如,翼展运动)。本解决方案的系统和方法可以使表面的分离的区段在平行于流体的流的方向上移动(例如,顺流运动)。翼展和顺流运动都可以搅动非常靠近壁的空气分子,从而改变壁处的速度梯度并减小或增强曳力。
[0049]
在一些实施例中,本解决方案的系统和方法可以操纵具有特定流动参数的湍流运动。例如,可以执行表面运动以将长度标度(例如,顺流长度标度)在100η至10,000η(参见上面的等式1)的范围内并且可以具有在10η'至1000η'的范围内的时间标度(例如,对流时间标度)(参见上面的等式2)的湍流运动作为目标。在这样的长度和时间标度上引起表面的运动可以使得能够有效地控制流体的湍流运动,诸如以取决于运动如何进行来增加或减小表面曳力。表面可以包括本文描述的各种结构(例如,变形器、致动器、脊、通道、延伸部、突起)或与这些结构耦合,这些结构具有与顺流长度标度、顺流时间标度或它们的组合对应的结构长度标度(包括结构之间的距离),从而使得能够针对目标的湍流运动有效修改表面曳力。通过被选择为在顺流长度标度或顺流时间标度的量级以内,在顺流长度标度或顺流时间标度的五分之一以内,在顺流长度标度或顺流时间标度的三分之一以内,在顺流长度标度或顺流时间标度的二分之一以内,在顺流长度标度或顺流时间标度的1.5以内,结构长度标度可以与顺流长度标度对应。
[0050]
翼展和顺流运动或者两者的某种组合都可以产生一个或多个表面波(沿着可变形表面与流体之间的界面传播的机械波),该表面波可以在一个或多个方向上操纵边界层。表面波可以是简单的表面波,诸如正弦波,或者可以是任何其它类型的波,包括但不限于正弦波的叠加。另外,表面波的波形可以是非周期性的或阻尼的,或者可以包括许多表面位移或变形。可以应用多种信号处理和分析技术中的任何一种以便生成期望的波形,包括但不限于傅立叶变换、快速傅立叶变换(fft)、小波变换等。
[0051]
与可以依赖提供主体的空气动力学形状而不是操纵流体的边界层并且可能不允许实时控制表面操纵以控制表面曳力的现有系统相比,本解决方案可以主动在包围主体的表面上产生变形和/或主动移动围绕主体的表面的分离的区段。照此,本解决方案可以实现更适应和可控的边界层操纵、表面波生成和表面曳力修改。
[0052]
虽然可以参考作为流体介质的空气来描述本文公开的许多概念,但是本解决方案可以使得能够主动控制多种流体中的任何一种的表面曳力。
[0053]
a.使用表面变形来主动控制表面曳力的系统和方法
[0054]
总体上参考图1
‑
8,示出了一种流体控制系统,该系统可以被用于通过使表面变形来主动控制表面的表面曳力。例如,流体控制系统可以使表面在垂直于该表面(或其一部分)所在的初始平面的方向上移动。在一些实施例中,流体控制系统包括在至少第一和第二
方向上覆盖主体的可变形表面。第一方向与第二方向正交。可变形表面包括面对主体的底侧和与底侧相对的顶侧。流体控制系统还包括在可变形表面和主体之间的至少一个变形器。至少一个变形器被配置为通过选择性地使可变形表面的顶侧变形来改变在可变形表面上流动的流体的边界层。流体控制系统可以通过选择性地使表面的顶侧变形来选择性地控制可变形表面上的表面曳力。
[0055]
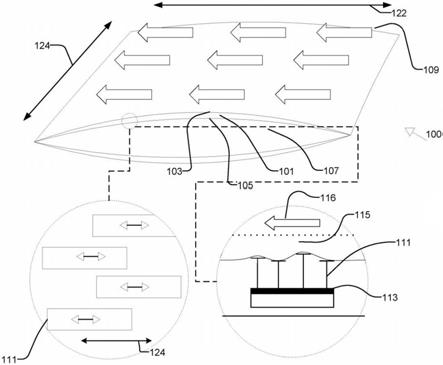
现在参考图1
‑
2,示出了使用可变形表面101的流体控制系统100。可变形表面101在第一方向和第二方向上覆盖主体107。可变形表面101具有面对主体107的底侧105和与底侧105相对的顶侧103。主体107可以是翼型的形状。
[0056]
在一些实施例中,主体107包括机翼、尾部、机身或火箭、商用飞机、军用飞机、无人驾驶航空器或任何其它空中运输平台的任何其它部件或部件的组合。主体107也可以是风力涡轮机、燃气涡轮机或其它机构的叶片。在一些实施例中,主体107是潜艇、潜水器、船、舰、驳船、个人船只、滑水橇或任何其它水上运输平台的任何其它部件或部件的组合。在一些实施例中,主体107是拖拉机拖车、卡车、牵引车拖车、汽车、摩托车、拖拉机、割草机、机动踏板车、自行车或任何其它地面运输平台的框架或任何其它部件或部件的组合。在一些实施例中,主体107是闭合的或部分闭合的组件,诸如管。主体107可以是可移动或不可移动系统的一部分。
[0057]
流体控制系统100包括被配置为使可变形表面101的顶侧103变形的一个或多个变形器111。通过使可变形表面101的顶侧103变形,变形器111可以主动控制可变形表面101之上的表面曳力。变形器111可以在垂直于流体109的流的表面上生成变形。流体109可以是空气、水或可以在可变形表面101之上流动的任何其它流体。如图1中所示,流体109在垂直于翼展方向124的顺流方向122上流动。通过将可变形表面101移入或移出可变形表面101(或其一部分)所在的初始平面,变形器111可以改变边界层115处流体109的速度。变形也可以在平面内进行,从而引起表面的基本上在平面内的来回运动(例如,相对于如图1中所描绘的顺流方向122或翼展方向124)。这种运动也可以改变流体的速度。
[0058]
变形器111可以选择性地使可变形表面101的顶侧103变形,这可以修改跨可变形表面101流动的流体109的边界层115。变形器111可以使可变形表面在特定位置处单独变形,从而允许控制变形在可变形表面101的顶侧103上的放置。在一些实施例中,变形器111可以控制可变形表面101上的变形的频率、波长、振幅、持续时间和间歇性中的一个或多个,以引起流体109的预期表面波以实现跨可变形表面101流动的流体109的表面曳力的期望改变。
[0059]
在一些实施例中,一个或多个致动器113控制一个或多个变形器111。在一些实施例中,每个致动器113控制对应的变形器111。在一些实施例中,至少一个致动器113控制多于一个变形器111。一个或多个致动器113可以由外部电源、电池、太阳能、内燃发动机或任何其它动力源供应动力。例如,下面讨论的控制电路117可以输出控制信号,以使动力源将期望的电流和/或期望的电压输送到一个或多个致动器113,以使一个或多个致动器113移动。一个或多个致动器113也可以由将流动能量直接转换成致动器可以使用的能量形式的换能器供应动力(例如,响应于被流动驱动而输出电信号的压电换能器)。
[0060]
变形器111可以产生表面波以修改边界层115的湍流。边界层115中的流体109将具有速度剖面,该速度剖面的速度小于流体109的自由流区域116中的速度。变形器111可以在
可变形表面101上的特定位置处和在特定时间生成选择性变形,以产生翼展运动,该翼展运动可产生一个或多个表面波,该表面波可以改变边界层115处的流体109的相对速度和/或边界层115中的湍流流的量。变形器111对边界层115的受控修改可以允许对主体107在行进通过流体109时经历的表面曳力的控制的测量。
[0061]
在一些实施例中,可变形表面101包括弹性体材料、薄膜材料、氮化硅、石墨或长链聚合物中的至少一种。可变形表面101的材料可以选择为增强可变形表面101的空气动力学特性。可变形表面101的材料可以选择为在边界层115和主体107之间实现最有利于主动控制表面曳力的适当界面。
[0062]
在一些实施例中,可变形表面101包括柔性材料并且被配置为在不同形状的主体之上被拉伸。这允许可变形表面101被制造为与若干不同的主体一起工作。例如,可变形表面101可以被配置为装配到不同型号但都具有相似尺寸的飞机机翼上。当将可变形表面101放置在每个主体107上时,可以对其进行轻微调整。变形器111可以相对于预期的流体流方向位于某些位置,以能够实现期望的表面曳力的主动控制。
[0063]
进一步参考图2,流体控制系统100包括传感器118。传感器118可以检测包围在第一和第二方向上覆盖主体107的可变形表面11的流体109的至少一个参数。传感器118可以包括流量计,以检测流体边界层115的流体109的速度。传感器118可以包括流量计,该流量计检测自由流区域116的流体109的速度。
[0064]
在一些实施例中,传感器118检测与主体107或包括主体107的平台相关联的参数。例如,传感器118可以包括检测主体107的位置或取向中的至少一个的位置传感器,诸如加速度计、陀螺仪、gps/gnss传感器或惯性导航系统。传感器118可以包括压力传感器。传感器118可以包括温度传感器。在一些实施例中,传感器118检测与包括主体107的平台的燃料水平相关联的参数,该参数可以被(下面描述的控制电路117)用于确定平台的燃料燃烧率。
[0065]
在一些实施例中,流体控制系统100包括控制电路117。控制电路可以包括处理器119和存储器121。处理器119可以是通用或专用处理器、专用集成电路(asic)、一个或多个现场可编程门阵列(fpga)、一组处理组件,或其它合适的处理组件。处理器119被配置为执行存储在存储器121中或从其它计算机可读介质(例如,cdrom、网络存储装置、远程服务器等)接收的计算机代码或指令。存储器121可以包括一个或多个设备(例如,存储器单元、存储器设备、存储设备等),用于存储数据和/或计算机代码,以完成和/或促进本公开中描述的各种过程。存储器121可以包括随机存取存储器(ram)、只读存储器(rom)、硬盘驱动器存储器、临时存储器、非易失性存储器、闪存、光学存储器,或用于存储软件对象和/或计算指令的任何其它合适的存储器。存储器121可以包括数据库组件、目标代码组件、脚本组件,或用于支持本公开中描述的各种活动和信息结构的任何其它类型的信息结构。存储器121可以经由控制电路117可通信地连接到处理器119,并且可以包括用于(例如,由处理器119)执行本文描述的一个或多个过程的计算机代码。当处理器119执行存储在存储器121中的指令时,处理器119通常配置控制电路117以完成此类活动。
[0066]
传感器118将检测到的参数发送到控制电路117。控制电路117基于从传感器118接收到的(一个或多个)参数来生成控制信号。控制电路117可以通过实现多种适用的控制算法或组合中的任何一种来生成控制信号,这些控制算法包括但不限于智能算法(人工智能、模糊控制、神经网络、遗传算法、基于随机优化的控制等)、查找表、传统控制器(经典控制
器、多变量控制器、最优控制器等)等。控制电路117可以基于接收到的参数(诸如基于速度和/或压力信息)来计算在可变形表面101之上流动的流体109的表面曳力。
[0067]
控制电路将控制信号传输到致动器113,致动器113移动变形器111以在可变形表面101中产生变形。这种变形可以修改流体边界层115,这可以导致主体107上的表面曳力的改变。
[0068]
在一些实施例中,控制电路117通过确定将通过变形器111的操作而生成的表面波的期望特性来生成控制信号,并且执行将期望特性翻译成信息以控制(一个或多个)致动器113的操作的控制功能。例如,控制电路117可以基于表面波的期望特性来生成控制信号,以指示每个变形器111的运动的振幅、频率或间歇性中的至少一个。控制电路117可以类似地基于流体109的期望表面曳力、流体109的速度、流体109的流率或与主体107、可变形表面101和/或流体109相关联的其它参数来生成控制信号。表面波的特性可以包括空间振幅、时间振幅(例如,运动发生的时间长度)、空间频率(例如,结合关于振荡的幅度的信息的频率)、时间频率或其任何组合。
[0069]
在一些实施例中,控制电路117基于由传感器118检测到的参数来生成控制信号。例如,控制电路117可以接收诸如速度、燃料水平或与包括主体107的平台的操作相关联的其它参数之类的参数,将接收到的参数与该参数的目标值进行比较,并修改控制信号以减小接收到的参数与参数的目标值之间的差异。类似地,控制电路117可以生成控制信号以实现表面曳力、流体109的流率或可以由传感器118测量和/或基于由传感器118测得的参数计算的其它参数的目标值。
[0070]
现在参考图3,在系统300中,流体109以多个流态304、308在表面101上流动。例如,流体109可以具有第一湍流流态304和比第一湍流流态304更远离表面101的第二湍流流态308。第一湍流流态304可以相对于表面101位于流体109的边界层之外。沿着流体109的流的顺流方向,流态304、308(或其部分)可以变成距表面101的前缘超过阈值距离的湍流。
[0071]
流态304、308可以用不同的流动参数,诸如雷诺数或涡流尺寸来表征。流体109的流的各个方面和态304、308可以基于流的湍流特征来表征。例如,流体109可以包括湍流涡流312。湍流涡流312可以由诸如湍流涡流312的尺寸参数316之类的参数来表征。
[0072]
在系统320中,表面101可以包括至少一个致动区域324或与之耦合。至少一个致动区域324可以与由变形器111或致动器113移动的表面101的一部分对应,如参考图1
‑
2所描述的。例如,可以使至少一个致动区域324执行平面内运动或平面外运动,以修改第一态304、第二态308或其组合中的流体流。
[0073]
在系统340中,表面101可以包括至少一个传感器区域344或与之耦合。至少一个传感器区域344可以被用于检测流体109的各种参数。传感器118可以在至少一个传感器区域344处提供,诸如以便检测与流体109的速度或流率相关联的参数。至少一个致动区域324(例如,其致动器或变形器)可以使用由至少一个传感器区域344检测到的参数来操作。
[0074]
在系统360中,表面101可以包括多个致动区域324或与之耦合。致动区域324可以沿着表面101彼此间隔开,诸如沿着相对于流体109的流的顺流方向。致动区域324可以相对于彼此具有不同的取向,这可以使致动区域324能够差分地控制流体109的流的参数。例如,可以驱动致动区域324以不同的频率或振荡距离移动。
[0075]
现在参考图4,在系统400中,流体109以单一流态404在表面101上流动。流态404可
以类似于流态304、308。流态404可以包括湍流涡流408,其可以由诸如尺寸参数412之类的参数表征。
[0076]
在系统420中,表面101可以包括至少一个致动区域424或与之耦合。至少一个致动区域424可以类似于至少一个致动区域324,以便控制在表面101上的流体109的流的曳力或其它特性。在系统440中,表面101可以包括至少一个传感器区域444和至少一个致动器区域424或与之耦合。至少一个致动器区域424可以基于经由至少一个传感器区域444检测到的流体109的流的参数来操作。在系统460中,表面101可以包括多个致动区域424或与之耦合,该多个致动区域可以以不同的方式操作以差分地控制流体109的各种参数。
[0077]
现在参考图5,表面101可以由至少部分地包围流体109的主体形成,诸如流体109流过的管500。表面101可以形成管500的面朝流体109的内表面。
[0078]
管500可以包括至少一个致动器504或与之耦合。致动器504可以类似于致动器113,诸如以引起表面101的至少一部分的平面内或平面外移动。致动器504可以与表面101的膜部分耦合以移动膜部分。致动器504可以基于从一个或多个传感器(例如,传感器118)接收的传感器数据进行操作。致动器504可以被用于移动表面101以调整表面101上的表面曳力从而调整流体109的流率。
[0079]
现在参考图6,表面101可以形成可移动或静止主体600的表面的至少一部分,诸如飞机的机翼。流体109可以流过主体600。主体600可以包括至少一个致动器604或与之耦合,致动器604可以类似于致动器113,诸如以引起表面101的至少一部分的平面内或平面外移动。致动器604可以与表面101的膜部分耦合以移动膜部分。致动器604可以基于从一个或多个传感器(例如,传感器118)接收的传感器数据进行操作。当主体600移动通过流体109时,致动器604可以被用于移动表面101以调整表面101上的表面曳力从而调整主体600的速度。
[0080]
现在参考图7,在一些实施例中,至少一个致动器113包括一个或多个电磁变形器501。一个或多个电磁变形器501可以在受控位置处选择性地生成一个或多个电磁脉冲(例如,时变电磁场)。在各种此类实施例中,可变形表面101对电磁脉冲做出响应并且可以或者被吸引到电磁脉冲(如区域505),或者被电磁脉冲排斥(如在区域503处)。可变形表面101对由电磁变形器501产生的电磁脉冲的反应在可变形表面101上产生变形。电磁变形器501可以调制电磁脉冲的频率或幅度中的至少一个,以选择性地移动可变形表面101。
[0081]
现在参考图8,至少一个致动器113包括一个或多个压电变形器550。一个或多个压电变形器550可以选择性地振荡(例如,相对于基线554)以引起表面101的移动。例如,一个或多个压电变形器550可以选择性地振荡以引起在基线554上方(例如,进入与表面101相邻的流体中)或在基线554下方(例如,远离与表面101相邻的流体)的平面外运动558。一个或多个压电变形器550可以被定向为选择性地振荡以引起表面101的平面内运动,诸如通过用平行于表面101的振荡轴定向。一个或多个压电变形器550可以被定位成具有不同的基线554。可以响应于被控制信号驱动而使一个或多个压电变形器550振荡。控制信号可以具有指示一个或多个压电变形器550的振荡的振幅、频率或间歇性中的至少一个的电流或电压。例如,一个或多个压电变形器550可以由脉宽调制的控制信号驱动。
[0082]
现在参考图9,可变形表面101被描绘为覆盖主体107。在一些实施例中,至少一个传感器603测量流体109的自由流区域116的参数。至少一个传感器601测量流体109(未示出)的边界层区域115的参数。由传感器603和601测得的参数可以包括流体流速、温度、流体
压力和流体的粘度。在一些实施例中,传感器601和603中的任一个或两者将它们的测量传输到控制电路117,如图2中所描绘的。控制电路117可以使用这些测量来计算与导致对包围可变形表面101的流体的边界层的修改的表面变形相关联的参数,以使控制电路117能够基于对边界层的期望修改来输出控制信号。
[0083]
现在参考图10,描绘了主动控制表面曳力的方法700。该方法可以使用流体控制系统100来执行。在701处,在流体流中的主体之上提供表面。该表面可以是可变形的。例如,表面可以是柔性的。
[0084]
在703处,提供能够使表面变形的变形器。变形器可以耦合到表面,诸如在表面与主体之间的表面的下侧。提供变形器可以包括提供多个变形器。
[0085]
在705处,测量在可变形表面之上流动的流体的参数。参数可以包括流体流速。例如,参数可以包括在可变形表面之上流动的流体的边界层中的流体流的速度;参数可以包括超出边界层的自由气流(自由流)中的流体流的速度。参数可以包括流体的压力或温度中的至少一个。在一些实施例中,参数包括主体的参数或包括主体的平台的参数,诸如速度或燃料燃烧率。
[0086]
在707处,由控制电路基于测得的参数生成用于修改测得的参数的控制信号。例如,控制电路可以生成控制信号以实现目标表面曳力、流体流速、车辆速度、车辆燃料燃烧,或与在可变形表面之上流动的流体的表面曳力相关的其它参数。
[0087]
在709处,控制信号被传输到变形器709。基于控制信号,变形器选择性地使可变形表面的顶侧变形以修改流体711的参数。
[0088]
如图10中所示,控制电路可以通过迭代地测量在表面之上流动的流体的参数并在每次迭代时更新控制信号以实现测得的参数的期望值来执行控制循环。例如,控制电路可以周期性地计算流体的速度,将计算出的速度与目标速度进行比较,并修改控制信号(并因此修改可变形表面的变形)以减小计算出的速度与目标速度之间的差异。在一些实施例中,控制电路可以将包括主体的车辆的当前燃料燃烧率与目标燃料燃烧率进行比较,并且修改控制信号(并因此修改可变形表面的变形)以减小当前燃料燃烧率与目标燃料燃烧率之间的差。
[0089]
b.使用表面振荡主动控制表面曳力的系统和方法
[0090]
总体上参考图11
‑
15,示出了一种流体控制系统,该流体控制系统可以被用于通过生成表面的振荡来主动控制表面的表面曳力,诸如通过使表面的各部分在表面的平面内移动。在一些实施例中,流体控制系统包括在至少第一方向和第二方向覆盖主体的表面。第一方向与第二方向正交。表面包括面对主体的底侧和与底侧相对的顶侧。流体控制系统在表面的顶侧上包括至少一个分离的可移动区段。该至少一个分离的可移动区段被配置为通过沿着表面的顶侧移动该至少一个分离的可移动区段来改变在表面上流动的流体的边界层。流体控制系统可以通过选择性地移动至少一个分离的可移动区段来选择性地控制表面上的表面曳力。
[0091]
现在参考图11
‑
12,描绘了使用至少一个分离的可移动区段801的流体控制系统800。表面803在第一和第二方向上覆盖主体809。表面803具有面对主体的底部807和与底侧相对的顶部805。流体811在垂直于翼展方向824的表面803的顶部805上的顺流方向822中流动。
[0092]
除了流体控制系统800通过在翼展方向824上平行于表面803的平面移动至少一个分离的可移动区段801来修改流体边界层815而不是通过使变形器使表面803变形为进出表面803的平面之外,流体控制系统800可以类似于流体控制系统100。(一个或多个)分离的可移动区段801的顺流或翼展移动可以生成表面波和振荡,这可以修改流体边界层815。在一些实施例中,多个分离的可移动区段801沿着表面803定位,在(一个或多个)分离的可移动区段801之间具有间隙。
[0093]
在一些实施例中,第一可移动区段801相对于第二可移动区段801移动。例如,第一和第二可移动区段801可以各自连接到致动器802,该致动器802可以在相反的方向(例如,沿着顺流方向822或翼展方向824的相反方向)上驱动第一和第二可移动区段801。在一些实施例中,第一可移动区段801是固定的,而第二可移动区段801相对于固定的第一可移动区段801移动。
[0094]
在各种实施例中,第一可移动区段801可以耦合到第二可移动区段801。例如,可移动区段801可以通过固定构件耦合。可移动区段801可以通过弹簧构件耦合,该弹簧构件可以通过在可移动区段801之间传输和/或阻尼移动力来促进表面波生成。
[0095]
可移动区段801的宽度可以变化。例如,可以基于局部流状况选择可移动区段801的宽度,诸如以将可移动区段801的宽度与和局部流状况相关联的参数相关联。参数可以包括流体811的雷诺数、平均流率或边界层厚度中的至少一个。照此,由可移动区段801生成的表面波的目标可以是打乱具有特定维度的流体811的扰动,诸如湍流涡流。
[0096]
进一步参考图12,流体控制系统800包括传感器817。传感器817可以类似于流体控制系统100的传感器118。例如,传感器817可以检测在流体边界层815处的流体811的速度。
[0097]
流体控制系统800包括控制电路819。类似于流体控制系统100的控制电路117,控制电路819包括处理器821和存储器823。控制电路819可以控制(一个或多个)致动器802和(一个或多个)分离的可移动区段801的操作,以便移动至少一个分离的可移动区段801并生成表面波,以便主动控制与流体边界层815相关联的表面曳力。例如,控制电路819可以基于由传感器817检测到的参数来生成控制信号。控制电路819可以将控制信号传输到(一个或多个)致动器802以移动(一个或多个)分离的可移动区段以产生表面波。控制电路819生成控制信号,该控制信号指定(一个或多个)致动器802使(一个或多个)分离的可移动区段801移动的相对速度。在一些实施例中,控制信号指定移动的频率、移动的持续时间或在表面803上(一个或多个)分离的可移动区段801移动到的位置。控制电路819可以生成控制信号,以使分离的可移动区段801以实现期望的表面波和/或修改流体811的表面曳力的方式移动。
[0098]
现在参考图13,在一些实施例中,至少一个致动器802可以包括至少一个带901,其跨表面803连接(一个或多个)分离的可移动区段801。在一些实施例中,每个带901之间是间隙903。至少一个带901可以使分离的可移动区段801在相反的方向上移动。至少一个带901可以使(一个或多个)可移动区段801以不同的速度移动以获得跨表面的离散速度波。
[0099]
现在参考图14,可以将一个或多个弹簧1001附接到(一个或多个)分离的可移动区段801。所述至少一个致动器可以包括至少一个弹簧致动器1003,其压缩和释放(一个或多个)弹簧1001以使(一个或多个)分离的可移动区段801跨表面803在顺流或翼展方向上移动。在(一个或多个)弹簧1001被至少一个弹簧致动器1003释放之后,(一个或多个)分离的
可移动区段801可以振荡。这种振荡运动可以有助于产生表面波,以改变在表面803上流动的流体的边界层。在一些实施例中,在分离的可移动区段801之间存在间隙。如上所述,可移动区段801可以在宽度上变化,以便优化沿着表面803的宽度或长度的曳力减小。
[0100]
现在参考图15,在一些实施例中,分离的可移动区段801是互锁的。例如,如图17中所示,第一可移动区段801可以包括第一延伸部1402,其至少部分地邻近第二可移动区段801的第二延伸部1404延伸。在一些实施例中,可以在可移动区段801之间以及从而在延伸部1401、1402之间提供间隙(未示出)。间隙可以最小程度地小,这可以使区段801之间的气流和/或曳力最小化。
[0101]
现在参考图16,描述主动控制表面曳力的方法1500。可以使用流体控制系统800来执行方法1500。在1501处,在流体流中的主体之上提供表面。该表面在至少两个正交方向上覆盖主体并且包括面对主体的底侧和与底侧相对的顶侧。
[0102]
在1503处,提供分离的可移动区段。分离的可移动区段可以跨表面顺流移动。可以提供多个分离的可移动区段,其可以具有间断的间隙。分离的可移动区段可以包括带、可旋转的盘或可以跨可变形表面移动的其它组件。
[0103]
在1505处,测量在可变形表面上流动的流体的参数。参数可以包括流体流速。参数可以包括流体的温度或压力。
[0104]
在1507处,由控制电路基于测得的参数生成用于修改测得的参数的控制信号。例如,控制电路可以生成控制信号以修改分离的可移动区段的操作,以实现目标表面曳力、流体流速、车辆速度、车辆燃料燃烧或与流过可变形表面的流体的表面曳力相关的其它参数。
[0105]
在1509处,控制信号被传输到分离的可移动区段。基于控制信号,在1511处,分离的可移动区段移动以修改流体的参数。例如,当流体流过主体时,分离的可移动区段可以以旨在修改流体的表面曳力的方式移动。
[0106]
如图16中所示,控制电路可以通过迭代地测量在表面之上流动的流体的参数并在每次迭代时更新控制信号以获得被测参数的期望值来执行控制循环。例如,传感器可以测量边界层处的流体流速。传感器会将测量传输到控制电路,控制电路会将其与边界层上的期望流体流速进行比较。如果测得的流体流速低于期望的流体流速,那么控制电路将生成控制信号,该控制信号将导致分离的可移动区段移动以增加流体流速。如果测得的流体流速高于期望的流体流速,那么控制电路将生成控制信号,该控制信号将导致分离的可移动区段移动以减小流体流速。在控制信号被传输到分离的可移动区段之后,传感器再次测量边界层处的流体流速并且反馈回路继续。在一些实施例中,传感器将测量通过流体的主体的速度并将该测量传输到控制电路,该控制电路会将其与主体的期望速度进行比较。如果主体的速度低于期望的速度,那么控制电路将生成控制信号,该控制信号将导致分离的可移动区段移动以通过减小表面曳力来增加主体的速度。如果主体的速度高于期望的速度,那么控制电路将生成控制信号,该控制信号将导致分离的可移动区段移动以通过增加表面曳力来减小主体的速度。在跟随控制信号之后,传感器再次测量主体的速度并且反馈回路继续。
[0107]
c.使用壁耦合主动控制表面曳力的系统和方法
[0108]
总体上参考图17
‑
18,根据本公开的流体控制系统和方法可以被用于通过在一个或多个流态中修改流体流来控制曳力,诸如在与表面相邻的第一流态中修改流体流,这也
会引起第二流态中的流体流的改变。可以基于各种参数来表征流态,所述参数包括但不限于雷诺数、距表面的距离或湍流涡流尺寸。在一些实施例中,系统包括:表面,表面具有在该表面之上流动的流体,流体包括在表面的第一距离内的第一湍流流态和距表面至少第二距离的第二湍流流态,第二距离大于第一距离;致动器,耦合到表面以使表面相对于流体移动;以及控制器,其使致动器以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数使表面移动。根据本公开的流体控制系统和方法可以选择性地控制特定尺寸和时间标度上的湍流运动(例如,在顺流长度上的100至10000个粘性单位的运动,具有10至1000个粘性时间单位的归一化时间标度,如本文进一步描述的)。根据本公开的流体控制系统和方法可以通过可以基于与壁侧第一流态的相互作用影响第二流态中的湍流的方式调谐表面波生成来降低用于引起期望的曳力改变的功率需求。
[0109]
现在参考图17,描绘了流体控制系统1900。流体控制系统1900包括表面1904,流体在表面1904上流动。流体1908包括在表面1904的第一距离1916内的第一湍流流态1912和距表面1904至少第二距离1924的第二湍流流态1920,第二距离大于或等于第一距离1916。第一和第二湍流流态1912、1920可以基于雷诺数大于阈值雷诺数而成为湍流。阈值雷诺数可以是表面1904的几何形状的函数。在一些实施例中,表面1904包括膜,该膜可以覆盖流体在其上流动的内表面(例如,管的内表面)或平台(诸如可移动平台)的外表面。
[0110]
流体控制系统1900包括耦合到表面1904的致动器1928。致动器1928可以使表面1904相对于流体1908移动。例如,致动器1928可以生成修改第一湍流流态1912中的曳力的表面波,该表面波进而修改第二湍流流态1920中的曳力。
[0111]
流体控制系统1900包括控制致动器1928的操作的控制器1932。控制器1932可以使致动器1928使表面1904以与第一湍流流态1912或第二湍流流态1920中的至少一个的流动参数对应的移动参数移动。在一些实施例中,移动参数包括表面1904的移动的频率,并且流动参数包括第一湍流流态1912或第二湍流流态1920中的至少一个的湍流涡流的尺寸参数。照此,控制器1932可以通过控制表面1904的移动参数来控制湍流流态1912、1920的曳力响应。在一些实施例中,控制器1932在提供给致动器1928以控制致动器1928的操作的控制信号中包括噪声分量,这可以通过更有效地干扰湍流涡流来促进曳力修改。
[0112]
在一些实施例中,流体控制系统1900包括至少一个传感器1936。至少一个传感器1936可以检测流体1908和/或表面1904的特性。在一些实施例中,传感器1936包括检测流体1908的压力的压力传感器。在一些实施例中,传感器1936包括检测流体1908的温度的温度传感器。传感器1936可以包括检测流体1908的流率或速度中的至少一个的流量计。在一些实施例中,控制器1932使用检测到的(一个或多个)特性来计算流体1908的雷诺数。
[0113]
在一些实施例中,表面1904沿着包括上游点和下游点的长度延伸。致动器1928可以耦合到下游点。传感器1936可以检测接近上游点的流体1908的特性,并且控制器可以使用在上游点处检测到的特性,以基于检测到的特性来使致动器1928在下游点处移动表面1904。
[0114]
在一些实施例中,致动器1928包括在第一层中的多个第一致动器和在第二层中的多个第二致动器。控制器1932可以使用多个第一致动器使表面1904生成具有第一频率和第一振幅的第一波,并且使用多个第二致动器使表面1904生成具有第二频率和第二振幅的第二波。第一频率可以大于或小于第二频率。第一振幅可以大于或小于第二振幅。
[0115]
在一些实施例中,控制器1932使致动器1928根据第二湍流流态1920中的位置来调整流动,以在表面1904上生成力。例如,控制器1932基于位置来改变多个致动器1928中的每一个的频率、振幅或其它操作参数。
[0116]
现在参考图18,描绘了使用壁耦合主动控制表面曳力的方法2000。可以使用本文描述的各种系统(包括流体控制系统1900)来执行方法2000。
[0117]
在2005处,致动器被耦合到表面,该表面具有在表面之上流动的流体。流体包括在表面的第一距离内的第一湍流流态和距壁至少第二距离的第二湍流流态,第二距离大于第一距离。致动器可以包括多个致动器,它们可以是分层的并且可以基于诸如频率和振幅之类的参数被独立控制。
[0118]
在2010处,控制器使致动器以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数使表面相对于流体移动。移动参数可以包括表面的移动的频率。流动参数可以包括第二湍流流态的湍流涡流的尺寸参数。在一些实施例中,控制器基于从传感器接收的数据(诸如温度、压力、流率和/或速度数据)来控制致动器的操作。在一些实施例中,控制器使致动器根据第二湍流流态中的位置来调整流动,以在表面上生成力。在一些实施例中,控制器在提供给致动器以控制致动器的操作的控制信号中包括噪声分量。
[0119]
1.一种用于控制由在材料主体之上流动的流体引起的曳力的方法,可以包括:识别在表面之上流动的流体的至少一个流态的顺流长度标度,该顺流长度标度大于大约10倍η且小于大约100000倍η,其中η是所述至少一个流态的粘性长度标度;识别所述至少一个流态的对流时间标度,该对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度;以及引起以下中的至少一个:(1)表面的至少一部分基于顺流长度标度和对流时间标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)所述至少一个流态基于顺流长度标度和对流时间标度的运动。
[0120]
2.如保护范围1所述的方法,可以包括输出控制信号,以使表面的至少所述部分执行与所述至少一个流态的顺流长度标度和对流时间标度对应的运动。
[0121]
3.如保护范围2所述的方法,可以包括将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0122]
4.如保护范围3所述的方法,可以包括由至少一个传感器检测流体的一个或多个参数;以及使用所述一个或多个参数生成控制信号。
[0123]
5.如保护范围1所述的方法,可以包括提供表面的一个或多个结构,所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0124]
6.在保护范围1所述的方法中,表面可以形成移动体的一部分。
[0125]
7.如保护范围1所述的方法,其中表面形成流体沿着其流动的不动体的一部分。
[0126]
8.如保护范围1所述的方法,可以包括引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0127]
9.如保护范围1所述的方法,可以包括基于流体的湍流涡流尺寸引起表面的运动。
[0128]
10.如保护范围1所述的方法,可以包括使运动实现流体在表面上的表面曳力的目标值。
[0129]
11.一种系统,可以包括表面和控制器。表面具有在表面之上流动的流体,流体包括具有顺流长度标度和对流时间标度的至少一个流态,顺流长度标度大于大约100倍η且小
于大约100000倍η,其中η是所述至少一个流态的粘性长度标度,对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度。控制器引起以下中的至少一个:(1)表面的至少一部分基于顺流长度标度和对流时间标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)所述至少一个流态基于顺流长度标度和对流时间标度的运动。
[0130]
12.在保护范围11所述的系统中,控制器可以被配置为输出控制信号,以使表面的至少所述部分执行与所述至少一个流态的顺流长度标度和对流时间标度对应的运动。
[0131]
13.在保护范围12的系统中,控制器可以被配置为将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0132]
14.如保护范围13所述的系统,可以包括至少一个传感器,所述至少一个传感器被配置为检测流体的一个或多个参数,并且控制器可以被配置为使用所述一个或多个参数生成控制信号。
[0133]
15.如保护范围11所述的系统,可以包括与表面耦合的一个或多个结构,所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0134]
16.在保护范围11所述的系统中,表面可以形成移动体的一部分。
[0135]
17.在保护范围11所述的系统中,表面可以形成流体沿着其流动的不动体的一部分。
[0136]
18.在保护范围11所述的系统中,控制器可以被配置为引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0137]
19.在保护范围11所述的系统中,控制器可以被配置为基于流体的湍流涡流尺寸引起表面的运动。
[0138]
20.在保护范围11所述的系统中,控制器可以被配置为使运动实现流体在表面上的表面曳力的目标值。
[0139]
21.一种用于控制由在材料主体之上流动的流体引起的曳力的方法,可以包括:识别在表面之上流动的流体的至少一个流态的顺流长度标度,该顺流长度标度大于大约10倍η且小于大约100000倍η,其中η是所述至少一个流态的粘性长度标度;以及引起以下中的至少一个:(1)表面的至少一部分基于顺流长度标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)至少一个流态基于顺流长度标度的运动。
[0140]
22.如保护范围21所述的方法,可以包括输出控制信号,以使表面的至少一部分执行与所述至少一个流态的顺流长度标度对应的运动。
[0141]
23.如保护范围22所述的方法,可以包括将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0142]
24.如保护范围23所述的方法,可以包括由至少一个传感器检测流体的一个或多个参数;以及使用所述一个或多个参数生成控制信号。
[0143]
25.如保护范围21所述的方法,可以包括提供表面的一个或多个结构,所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0144]
26.在保护范围21所述的方法中,表面可以形成移动体的一部分。
[0145]
27.在保护范围21所述的方法中,表面可以形成流体沿着其流动的不动体的一部分。
[0146]
28.根据保护范围21所述的方法,可以包括引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0147]
29.如保护范围21所述的方法,可以包括基于流体的湍流涡流尺寸引起表面的运动。
[0148]
30.如保护范围21所述的方法,可以包括使运动实现流体在表面上的表面曳力的目标值。
[0149]
31.一种系统,可以包括表面和控制器。表面具有在表面之上流动的流体,流体包括具有顺流长度标度的至少一个流态,顺流长度标度大于大约100倍η且小于大约100000倍η,其中η是所述至少一个流态的粘性长度标度。控制器引起以下中的至少一个:(1)表面的至少一部分基于顺流长度标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)至少一个流态基于顺流长度标度的运动。
[0150]
32.在保护范围31所述的系统中,控制器可以被配置为输出控制信号,以使表面的至少一部分执行与所述至少一个流态的顺流长度标度对应的运动。
[0151]
33.在保护范围32所述的系统中,控制器可以被配置为将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0152]
34.如保护范围32所述的系统,可以包括至少一个传感器,所述至少一个传感器被配置为检测流体的一个或多个参数。控制器可以被配置为使用所述一个或多个参数生成控制信号。
[0153]
35.如保护范围31所述的系统,可以包括与表面耦合的一个或多个结构,所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0154]
36.在保护范围31所述的系统中,表面可以形成移动体的一部分。
[0155]
37.在保护范围31所述的系统中,表面可以形成流体沿着其流动的不动体的一部分。
[0156]
38.在保护范围31所述的系统中,控制器可以被配置为引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0157]
39.如保护范围11所述的系统,其中控制器可以被配置为基于流体的湍流涡流尺寸引起表面的运动。
[0158]
40.在保护范围11所述的系统中,控制器可以被配置为使运动实现流体在表面上的表面曳力的目标值。
[0159]
41.一种用于控制由在材料主体之上流动的流体引起的曳力的方法,可以包括:识别在表面之上流动的流体的至少一个流态的顺流长度标度,该顺流长度标度大于大约10倍η且小于大约100000倍η,其中η是所述至少一个流态的粘性长度标度;以及提供表面的一个或多个结构,所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0160]
42.如保护范围21所述的方法,可以包括使用表面的所述一个或多个结构引起所述至少一个流态的与顺流长度标度对应的运动。
[0161]
43.如保护范围22所述的方法,可以包括输出控制信号,以使表面的所述一个或多个结构执行与所述至少一个流态的顺流长度标度对应的运动。
[0162]
44.如保护范围43所述的方法,可以包括将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0163]
45.如保护范围43所述的方法,可以包括由至少一个传感器检测流体的一个或多个参数,以及使用所述一个或多个参数生成控制信号。
[0164]
46.在保护范围41所述的方法中,表面可以形成移动体的一部分。
[0165]
47.在保护范围41所述的方法中,表面可以形成流体沿着其流动的不动体的一部分。
[0166]
48.如保护范围41所述的方法,可以包括引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0167]
49.如保护范围41所述的方法,可以包括基于流体的湍流涡流尺寸引起表面的运动。
[0168]
50.如保护范围41所述的方法,可以包括使运动实现流体在表面上的表面曳力的目标值。
[0169]
51.一种系统,可以包括表面和与该表面耦合的一个或多个结构。表面具有在表面之上流动的流体,流体包括具有顺流长度标度的至少一个流态,顺流长度标度大于大约10倍η且小于大约100000倍η,其中η是所述至少一个流态的粘性长度标度。所述一个或多个结构具有与顺流长度标度对应的结构长度标度。
[0170]
52.在保护范围51所述的系统中,所述一个或多个结构可以被配置为引起所述至少一个流态的与顺流长度标度对应的运动。
[0171]
53.如保护范围52所述的系统,可以包括控制器,该控制器使表面的所述一个或多个结构执行与所述至少一个流态的顺流长度标度对应的运动。
[0172]
54.在保护范围53所述的系统中,控制器可以被配置为向与表面耦合的至少一个变形器输出控制信号,以使所述至少一个变形器根据运动来移动表面。
[0173]
55.如保护范围54所述的系统,可以包括至少一个传感器,所述至少一个传感器被配置为检测流体的一个或多个参数,并且控制器可以被配置为使用所述一个或多个参数生成控制信号。
[0174]
56.在保护范围53所述的系统中,控制器可以被配置为引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0175]
57.在保护范围53所述的系统中,控制器可以被配置为基于流体的湍流涡流尺寸引起表面的运动。
[0176]
58.在保护范围53所述的系统中,控制器可以被配置为使运动实现流体在表面上的表面曳力的目标值。
[0177]
59.在保护范围51所述的系统中,表面可以形成移动体的一部分。
[0178]
60.在保护范围51所述的系统中,表面可以形成流体沿着其流动的不动体的一部分。
[0179]
61.一种用于控制由在材料主体之上流动的流体引起的曳力的方法,可以包括:识别在表面之上流动的流体的至少一个流态的对流时间标度,该对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度;以及引起以下中的至少一个:(1)表面的至少一部分基于对流时间标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)至少一个流态基于对流时间标度的运动。
[0180]
62.如保护范围61所述的方法,可以包括输出控制信号,以使表面的至少一部分执
行与所述至少一个流态的对流时间标度对应的运动。
[0181]
63.如保护范围62所述的方法,可以包括将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0182]
64.如保护范围63所述的方法,可以包括由至少一个传感器检测流体的一个或多个参数;以及使用所述一个或多个参数生成控制信号。
[0183]
65.如保护范围61所述的方法,可以包括提供表面的一个或多个结构,所述一个或多个结构具有与所述至少一个流态的顺流长度标度对应的结构长度标度。
[0184]
66.如保护范围61所述的方法,表面可以形成移动体的一部分。
[0185]
67.在保护范围61所述的方法中,表面可以形成流体沿着其流动的不动体的一部分。
[0186]
68.如保护范围61所述的方法,可以包括引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0187]
69.如保护范围61所述的方法,可以包括基于流体的湍流涡流尺寸引起表面的运动。
[0188]
70.如保护范围61所述的方法,可以包括使运动实现流体在表面上的表面曳力的目标值。
[0189]
71.一种系统,可以包括表面和控制器。表面具有在表面之上流动的流体,流体包括具有对流时间标度的至少一个流态,该对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度。控制器引起以下中的至少一个:(1)表面的至少一部分基于对流时间标度的运动,以修改在流体的所述至少一个流态下的流体流,或者(2)至少一个流态基于对流时间标度的运动。
[0190]
72.在保护范围71所述的系统中,控制器可以被配置为输出控制信号,以使表面的至少一部分执行与所述至少一个流态的对流时间标度对应的运动。
[0191]
73.在保护范围72所述的系统中,控制器可以被配置为将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0192]
74.如保护范围72所述的系统,可以包括至少一个传感器,所述至少一个传感器被配置为检测流体的一个或多个参数,并且控制器可以被配置为使用所述一个或多个参数生成控制信号。
[0193]
75.如保护范围71所述的系统,可以包括与表面耦合的一个或多个结构,所述一个或多个结构具有与所述至少一个流态的顺流长度标度对应的结构长度标度。
[0194]
76.在保护范围71所述的系统中,表面可以形成移动体的一部分。
[0195]
77.在保护范围71所述的系统中,表面可以形成流体沿着其流动的不动体的一部分。
[0196]
78.在保护范围71所述的系统中,控制器可以被配置为引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0197]
79.在保护范围71所述的系统中,控制器可以被配置为基于流体的湍流涡流尺寸引起表面的运动。
[0198]
80.在保护范围71所述的系统中,控制器可以被配置为使运动实现流体在表面上的表面曳力的目标值。
[0199]
81.一种用于控制由在材料主体之上流动的流体引起的曳力的方法,可以包括:识别在表面之上流动的流体的至少一个流态的对流时间标度,该对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度;以及提供表面的一个或多个结构,所述一个或多个结构具有与对流时间标度对应的结构长度标度。
[0200]
82.如保护范围81所述的方法,可以包括使用表面的所述一个或多个结构引起所述至少一个流态的与对流时间标度对应的运动。
[0201]
83.如保护范围82所述的方法,可以包括输出控制信号,以使表面的所述一个或多个结构执行与所述至少一个流态的对流时间标度对应的运动。
[0202]
84.如保护范围83所述的方法,可以包括将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0203]
85.如保护范围83所述的方法,可以包括由至少一个传感器检测流体的一个或多个参数;以及使用所述一个或多个参数生成控制信号。
[0204]
86.在保护范围81所述的方法中,表面可以形成移动体的一部分。
[0205]
87.在保护范围81所述的方法中,表面可以形成流体沿着其流动的不动体的一部分。
[0206]
88.如保护范围81所述的方法,可以包括引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0207]
89.如保护范围81所述的方法,可以包括基于流体的湍流涡流尺寸引起表面的运动。
[0208]
90.如保护范围81所述的方法,还包括使运动实现流体在表面上的表面曳力的目标值。
[0209]
91.一种系统,可以包括表面和与该表面耦合的一个或多个结构。表面具有在表面之上流动的流体,流体包括具有对流时间标度的至少一个流态,该对流时间标度具有大于大约10η'且小于大约10000η'的持续时间,其中η’是所述至少一个流态的粘性时间标度。所述一个或多个结构具有与对流时间标度对应的结构长度标度。
[0210]
92.在保护范围91所述的系统中,所述一个或多个结构可以被配置为引起所述至少一个流态的运动,使得所述至少一个流态的运动的幅度与对流时间标度对应。
[0211]
93.如保护范围92所述的系统,可以包括控制器,该控制器使表面的所述一个或多个结构执行与所述至少一个流态的对流时间标度对应的运动。
[0212]
94.在保护范围93所述的系统中,控制器可以被配置为将控制信号输出到与表面耦合的至少一个变形器,以使所述至少一个变形器根据运动来移动表面。
[0213]
95.如保护范围94所述的系统,可以包括至少一个传感器,所述至少一个传感器被配置为检测流体的一个或多个参数,并且控制器可以被配置为使用所述一个或多个参数生成控制信号。
[0214]
96.在保护范围93所述的系统中,控制器可以被配置为引起表面相对于流体的流方向沿顺流方向或翼展方向中的至少一个方向的运动。
[0215]
97.在保护范围93所述的系统中,控制器可以被配置为基于流体的湍流涡流尺寸引起表面的运动。
[0216]
98.在保护范围93所述的系统中,控制器可以被配置为使运动实现流体在表面上的表面曳力的目标值。
[0217]
99.在保护范围91所述的系统中,表面可以形成移动体的一部分。
[0218]
100.在保护范围91所述的系统中,表面可以形成流体沿着其流动的不动体的一部分。
[0219]
101.一种系统,可以包括表面、耦合到该表面的致动器以及控制器。表面具有在表面之上流动的流体,流体包括在表面的第一距离内的第一湍流流态和距表面至少第二距离的第二湍流流态,第二距离大于第一距离。致动器可以使表面相对于流体移动。控制器可以使致动器使表面以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数移动。
[0220]
102.在保护范围101所述的系统中,移动参数包括表面的移动的空间振幅、空间频率、时间振幅或时间频率中的至少一个,并且流动参数包括第一湍流流态或第二湍流流态中的至少一个的湍流涡流的尺寸参数。
[0221]
103.在保护范围101所述的系统中,表面沿着包括上游点和下游点的长度延伸,致动器耦合到下游点。该系统可以包括传感器,该传感器检测在接近上游点处的流体的特性,控制器使用在上游点处检测到的特性以基于检测到的特性使致动器在下游点处移动表面。
[0222]
104.在保护范围103所述的系统中,传感器可以包括压力传感器,该压力传感器检测接近上游点的流体的压力。
[0223]
105.在保护范围103所述的系统中,传感器可以包括流量计,该流量计检测接近上游点的流体的流率或速度中的至少一个。
[0224]
106.在保护范围103所述的系统中,传感器可以包括温度传感器,该温度传感器检测接近上游点的流体的温度。
[0225]
107.在保护范围101所述的系统中,致动器可以包括在第一致动区域中的多个第一致动器和在第二致动区域中的多个第二致动器,控制器使用所述多个第一致动器来使表面生成具有第一频率和第一振幅的第一波,并且控制器使用所述多个第二致动器来使表面生成具有第二频率和第二振幅的第二波。
[0226]
108.在保护范围107所述的系统中,第一频率可以小于第二频率。
[0227]
109.在保护范围107所述的系统中,第一频率可以大于第二频率。
[0228]
110.在保护范围107所述的系统中,第一振幅可以大于第二振幅。
[0229]
111.在保护范围107所述的系统中,第一振幅可以小于第二振幅。
[0230]
112.在保护范围101所述的系统中,控制器可以使致动器增加或减小由第二湍流流态引发的曳力中的至少一个。
[0231]
113.在保护范围101所述的系统中,控制器可以使致动器根据第二湍流流态中的位置来调整流动。
[0232]
114.在保护范围101所述的系统中,控制器可以在提供给致动器以控制致动器的操作的控制信号中包括噪声分量。
[0233]
115.在保护范围101所述的系统中,表面可以包括流体在其上流动的内表面的致动区域。
[0234]
116.在保护范围101所述的系统中,表面可以包括平台的外表面的致动区域。
[0235]
117.在保护范围116所述的系统中,其中平台是可移动平台。
[0236]
118.一种方法,可以包括将致动器耦合到具有在表面之上流动的流体的表面,流体包括在表面的第一距离内的第一湍流流态和距表面至少第二距离的第二湍流流态,第二距离大于第一距离;并且由控制器使致动器使表面相对于流体以与第一湍流流态或第二湍流流态中的至少一个的流动参数对应的移动参数移动。
[0237]
119.在保护范围118所述的方法中,移动参数可以包括表面的移动的空间振幅、空间频率、时间振幅或时间频率中的至少一个,并且流动参数包括第一湍流流态或第二湍流流态中的至少一个的湍流涡流的尺寸参数。
[0238]
120.在保护范围118所述的方法,表面可以沿着包括上游点和下游点的长度延伸,致动器耦合到下游点。该方法可以包括由传感器检测在接近上游点处的流体的特性;并且由控制器使用在上游点处检测到的特性以基于检测到的特性使致动器在下游点处移动表面。
[0239]
121.在保护范围120所述的方法中,传感器可以包括压力传感器。该方法可以包括由压力传感器检测接近上游点的流体的压力。
[0240]
122.在保护范围120所述的方法中,传感器可以包括流量计。该方法可以包括有由流量计检测接近上游点的流体的流率或速度中的至少一个。
[0241]
123.在保护范围120所述的方法中,传感器可以包括温度传感器。该方法可以包括由温度传感器检测接近上游点的流体的温度。
[0242]
124.如保护范围120所述的方法,可以包括由控制器使致动器的多个第一致动器使表面生成具有第一频率和第一振幅的第一波;以及由控制器使致动器的多个第二致动器使表面生成具有第二频率和第二振幅的第二波。
[0243]
125.在保护范围124所述的方法中,第一频率可以小于第二频率。
[0244]
126.在保护范围124所述的方法中,第一频率可以大于第二频率。
[0245]
127.在保护范围124所述的方法中,第一振幅可以大于第二振幅。
[0246]
128.在保护范围124所述的方法中,第一振幅可以小于第二振幅。
[0247]
129.如保护范围128所述的方法,可以包括由控制器使致动器修改由第二湍流流态引发的曳力。
[0248]
130.如保护范围128所述的方法,可以包括由控制器使致动器根据第二湍流流态中的位置来调整流动。
[0249]
131.如保护范围128所述的方法,可以包括由控制器生成包括噪声分量的控制致动器的操作的控制信号。
[0250]
132.在保护范围128所述的方法中,表面可以包括流体在其上流动的内表面的致动区域。
[0251]
133.在保护范围128所述的方法中,表面可以包括平台的外表面的致动区域。
[0252]
134.在保护范围133所述的方法中,平台可以是可移动平台。
[0253]
如本文所使用的,术语“大致”、“大约”、“基本上”和类似术语旨在具有广泛的含义,与本公开的主题涉及的本领域普通技术人员的普通和公认用法相一致。审阅本公开的本领域技术人员应当理解的是,这些术语旨在允许描述所描述并要求保护的某些特征,而不将这些特征的范围限制到所提供的精确数值范围。因而,这些术语应当被解释为指示所
描述并要求保护的主题的无实质或无关紧要的修改或变更被认为在所附权利要求书中陈述的本公开的范围内。
[0254]
如本文所使用的,术语“耦合”是指两个构件彼此直接或间接地接合。这样的接合可以是静止的(例如,永久的或固定的)或可移动的(例如,可移除的或可释放的)。这种接合可以通过两个构件彼此直接耦合、通过两个构件使用分离的中间构件和任何附加的彼此耦合的中间构件彼此耦合或者通过两个构件使用与两个构件之一一体地形成为单个整体的中间构件彼此耦合来实现。此类构件可以机械地、电气地和/或流体地耦合。
[0255]
如本文所使用的,术语“或”以其包含性含义(而不是以其排他性含义)使用,使得当用于连接元件的列表时,术语“或”指列表中的一个、一些或全部元素。除非另有明确说明,否则诸如短语“x、y和z中的至少一个”之类的连接性语言应理解为传达元素可以是x、y、z中任一个;x和y;x和z;y和z;或x、y和z(即,x、y和z的任何组合)。因此,除非另外指出,否则这种连接性语言一般不旨在暗示某些实施例要求存在x中的至少一个、y中的至少一个和z中的至少一个。
[0256]
本文中对元件的位置(例如,“顶部”、“底部”、“上方”、“下方”等)的引用仅用于描述附图中各种元件的朝向。应当注意的是,根据其它示例性实施例,各种元件的朝向可以不同,并且这样的变化旨在被本公开所涵盖。
[0257]
结合本文公开的实施例描述的用于实现各种过程、操作、说明性逻辑、逻辑块、模块和电路的硬件和数据处理组件可以用被设计为执行本文描述的功能的通用单芯片或多芯片处理器、数字信号处理器(dsp)、专用集成电路(asic)、现场可编程门阵列(fpga)或其它可编程逻辑设备、离散门或晶体管逻辑、离散硬件组件或其任何组合来实现或执行。通用处理器可以是微处理器,或者是任何常规的处理器、控制器、微控制器或状态机。处理器也可以被实现为计算设备的组合,诸如dsp和微处理器的组合、多个微处理器、与dsp核心结合的一个或多个微处理器,或任何其它这样的配置。在一些实施例中,特定过程和方法可以由特定于给定功能的电路系统执行。存储器(例如,存储器、存储器单元、存储设备等)可以包括一个或多个用于存储数据和/或计算机代码的设备(例如,ram、rom、闪存、硬盘存储器等)以完成或促进本公开中描述的各种过程、层和模块。存储器可以是或包括易失性存储器或非易失性存储器,并且可以包括数据库组件、目标代码组件、脚本组件,或用于支持本公开中描述的各种活动和信息结构的任何其它类型的信息结构。根据示例性实施例,存储器经由处理电路可通信地连接到处理器并且包括用于(例如,由处理电路和/或处理器)执行本文描述的一个或多个过程的计算机代码。
[0258]
本公开预期任何机器可读介质上用于实现各种操作的方法、系统和程序产品。本公开的实施例可以使用现有的计算机处理器来实现,或者由为此目的或其它目的而被并入的用于适当系统的专用计算机处理器来实现,或者由硬连线系统来实现。本公开的范围内的实施例包括程序产品,该程序产品包括用于在其上承载或具有存储在其上的机器可执行指令或数据结构的机器可读介质。这样的机器可读介质可以是可以由通用或专用计算机或具有处理器的其它机器访问的任何可用介质。举例来说,这样的机器可读介质可以包括ram、rom、eprom、eeprom或其它光盘存储装置、磁盘存储装置或其它磁性存储设备,或者可以被用于以机器可执行指令或数据结构的形式承载或存储期望程序代码并且可以由通用或专用计算机或其它带有处理器的机器访问的任何其它介质。以上的组合也包括在机器可
读介质的范围内。机器可执行指令包括例如使通用计算机、专用计算机或专用处理机器执行特定功能或功能组的指令和数据。
[0259]
虽然附图和描述可以示出方法步骤的具体次序,但是除非上文另外指定,否则这些步骤的次序可以与所描绘和描述的次序不同。而且,两个或更多个步骤可以并发地执行或部分并发地执行,除非上面另有说明。这种变化可以例如取决于所选择的软件和硬件系统并取决于设计者的选择。所有这些变化都在本公开的范围内。同样,可以用具有基于规则的逻辑和其它逻辑的标准编程技术来完成所描述方法的软件实施方式,以完成各种连接步骤、处理步骤、比较步骤和决策步骤。
[0260]
重要的是要注意,各种示例性实施例中所示的流体控制系统的结构和布置以及流体控制方法仅仅是说明性的。此外,一个实施例中公开的任何元素可以与本文公开的任何其它实施例结合或利用。虽然上面已经描述了可以在另一个实施例中结合或利用的来自一个实施例的元素的仅一个示例,但是应当认识到的是,各种实施例的其它元素可以与本文公开的任何其它实施例结合或利用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1