风系统及其电机组件和控制方法与流程
1.本技术涉及风系统,特别地涉及风系统中的电机组件及其控制方法。
背景技术:
2.在风系统中,进入风系统的室内空气和风系统的盘管中的水进行热交换。电机是风系统实现换热功能的重要部件。因此,希望提供一种运行稳定、便于制造、成本经济的电机组件。
技术实现要素:
3.本技术提供一种风系统,该风系统中的电机组件的设置有利于对电机运行状态的控制、便于制造、减少故障、避免共振、节省成本、减少电磁干扰。
4.根据本技术的一个方面,本技术的风系统包括主电机单元和从电机单元。所述主电机单元包括主控单元、主驱动装置和主电机,所述主驱动装置配置为被所述主控单元控制,所述主电机配置为被所述主驱动装置驱动。所述从电机单元包括从驱动装置和从电机,所述从驱动装置配置为被所述主控单元控制,所述从电机配置为被所述从驱动装置驱动。
5.如上所述的风系统,所述主电机单元和所述从电机单元是物理相互分离的电机单元。
6.如上所述的风系统,所述主电机单元和所述从电机单元配置为通过主电机i/o接口和从电机i/o接口相互通信。
7.如上所述的风系统,所述主控单元配置为接收从电机的工作状态信号,并根据所述从电机的工作状态信号来控制所述从电机的运行。
8.如上所述的风系统,所述主控单元配置为接收所述主电机的工作参数,并根据所述主电机的工作参数来控制所述主电机的运行。
9.如上所述的风系统,所述主电机单元的工作模式包括恒转速模式、恒扭矩模式或恒功率模式,所述主电机的工作参数包括所述主电机的转速、所述主电机的绕组交流电流和所述主电机的逆变电压,所述主控制单元配置为根据所述主电机的所述转速通过所述主驱动装置控制所述主电机的转速,根据所述主电机的所述绕组交流电流通过所述主驱动装置控制所述主电机的扭矩,根据所述主电机的所述绕组交流电流和所述逆变电压的乘积通过所述主驱动装置控制所述主电机的功率。
10.如上所述的风系统,所述主控单元配置为发出控制信号以通过所述从驱动装置控制所述从电机的转速。
11.如上所述的风系统,所述从电机单元配置为被控制以转速跟随模式或转速跟随模式及避震模式运行。
12.如上所述的风系统,所述主控单元配置为,在所述从电机单元以所述转速跟随模式运行时,所述主控单元发出控制信号通过所述从驱动装置控制所述从电机以特定转速转动,所述特定转速包括和所述主电机相同的转速、小于或大于所述主电机的转速。
13.如上所述的风系统,所述主控单元(204)被配置为:接收并解析从外部控制中心接收的指令信号以确定对应于所述指令信号的主电机理想目标转速和从电机理想目标转速,并判断所述主电机理想目标转速和所述从电机理想目标转速与使得所述风系统发生共振的共振转速的差值是否分别达到预定避振量;如果所述主电机理想目标转速和所述从电机理想目标转速与所述共振转速的差值都达到或超过所述预定避振量,所述主控单元(204)将所述主电机理想目标转速设定为主电机实际目标转速,并将所述从电机理想目标转速设定为从电机实际目标转速;和如果所述主电机理想目标转速和所述从电机理想目标转速中的至少一个和所述共振转速的差值没有达到所述预定避振量,在所述主电机理想目标转速大于或等于所述从电机理想目标转速的情况下,主控单元(204)将主电机第一调整目标转速设定为主电机实际目标转速,并将从电机第一调整目标转速设定为从电机实际目标转速;而在所述主电机理想目标转速小于所述从电机理想目标转速的情况下,主控单元(204)将主电机第二调整目标转速设定为主电机实际目标转速,并将从电机第二调整目标转速设定为从电机实际目标转速;其中,所述主电机第一调整目标转速=所述主电机理想目标转速+n
×
预定避振量,所述从电机第一调整目标转速=所述从电机理想目标转速-n
×
预定避振量;和所述主电机第二调整目标转速=所述主电机理想目标转速-n
×
预定避振量,所述从电机第二调整目标转速=所述从电机理想目标转速+n
×
预定避振量;其中,n选自2或2以上的正整数。
14.如上所述的风系统,所述主电机单元包括电源转换单元,所述主控单元配置为监测从所述电源转换单元输出的电流,且根据监测得到的所述电压转换单元输出的所述电流,所述主控单元控制所述主驱动装置使得所主电机的绕组交流电流移动相位,使得从所述电源转换单元输出的电流最小,以使所述风系统的视在功率最低。
15.如上所述的风系统,所述风系统包括接线盒,所述主电机单元直接电连接到所述接线盒,所述从电机单元电连接到所述主电机单元。
16.如上所述的风系统,所述接线盒和所述从电机单元分别位于所述主电机单元的两侧。
17.如上所述的风系统,所述风系统可以是模块机、风机模块组、风机盘管机组、新风系统、风冷水系统和空气处理机。
附图说明
18.图1是本技术的风系统的一个实施例的结构示意图。
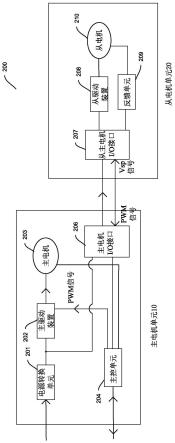
19.图2是本技术的风系统中电机组件的一个实施例的功能模块框图。
20.图3是图2中示出主电机单元和从电机单元中的驱动装置的一个实施例的示意图。
21.图4是图2中示出的主控单元的框图。
22.图5是电机组件的控制方法的一个实施例的流程框图。
具体实施方式
23.下面将参考构成本说明书一部分的附图对本技术的各种具体实施方式进行描述。应该理解的是,在可能的情况下,本技术中使用的相同或者相类似的附图标记指的是相同的部件。
24.本技术所述的风系统可以是模块机、风机模块组、风机盘管机组、新风系统、风冷水系统和空气处理机等。
25.图1是风系统100的一个实施例的结构示意图。在图1所示的实施例中,风系统100包括壳体101、布置在所述的壳体101中的主电机单元10和从电机单元20、盘管102以及接线盒104。壳体101包括一安装板111,接线盒104固定在安装板111的一端,用于为用户提供接线端口,接线端口包括电源接口和控制信号接口。主电机单元10通过一导线112连接到接线盒104以连接电源和接收控制指令。从电机单元20通过一导线113连接到主电机单元10,以从主电机单元10连接电源和接收控制信号。主电机单元10和所述从电机单元20是物理相互分离的。主电机单元10位于接线盒104和从电机单元20之间。主电机单元10、从电机单元20和接线盒104的这种位置设置及连接关系使得连接主电机单元10、从电机单元20和接线盒104的导线长度减小,从而便于制造、节省成本。盘管102被固定到风系统100的壳体101,面向安装板111的一侧,用于容纳冷水或热水,以和室内空气进行热交换。
26.如图1所示,主电机单元10通过轴109在主电机单元10的两侧分别连接风机105和106,从电机单元20通过轴110在从电机单元20的两侧连接风机107和108。主电机单元10和从电机单元20的外壳带有支架(未示出),主电机单元10和从电机单元20通过支架固定连接到风系统100的安装板111。风机105、106、107、108的蜗壳固定在安装板111上。
27.如图1所示,壳体101中设有一个出风风道103。主电机单元10和从电机单元20驱动风机105、106、107、108转动使得风系统100在进气口处形成负压,从而室内空气进入风系统100。主电机单元10和从电机单元20驱动风机105、106、107、108转动,以驱动进入风系统100的空气在和盘管102中的水热交换后,进入单个出风风道103并经单个出风风道103的出口释放到室内(如图1箭头所示)。在图1所示的实施例中,盘管102设置在出风风道103中。在其它实施例中,盘管102也可以设置在进风风道(未示出)中。
28.尽管在图1的实施例中,风系统采用一个主电机单元和一个从电机单元,在其它实施例中,风系统可以采用一个主电机单元和两个或两个以上的从电机单元。在采用两个或两个以上的从电机单元的风系统中,每个从电机单元分别通过相应的导线和主电机单元相连,以从主电机单元接收电源和控制信号。尽管在图1的实施例中,风系统的每个电机单元驱动两个风机,在其它实施例中,风系统的每个电机单元可以只驱动一个风机。
29.在一个实施例中,主电机单元10可以是电子换向电机,从电机单元20可以是无刷直流电机。
30.图2是图1所示的电机组件的一个实施例的功能模块框图200,包括主电机单元10和从电机单元20。
31.如图2所示,主电机单元10包括电源转换单元201、主驱动装置202、主电机203、主控单元204和主电机i/o接口206。在另外的实施例中,主电机i/o接口206也可以是无线控制模块。
32.主电机单元10的电源转换单元201被配置为接收交流电源(如,220v/50hz的单相电压、或380v/50hz的三相电压),并将接收的交流电源转化为直流电源(如,dc310v、dc540v)提供给主驱动装置202。主驱动装置202对电源转换单元201所输出的直流电源进行双向pwm变换,形成有效值和频率均可控的双向pwm电压(即,逆变电压)给到主电机203的绕组。具体地说,主驱动装置202中设有装置(如,换向器或逆变器)产生逆变电压,逆变电压施
加于主电机203的绕组后形成交流电流,用以驱动主电机203转动。由于主驱动装置202设置在主电机单元10中,从主驱动装置202到主电机203的导线长度短,可以有效减少由主驱动装置202到主电机203的逆变电压输出产生的电磁干扰。主控单元204从外部控制中心接收控制指令,并基于控制指令启动风系统。主控单元204从外部控制中心接收的控制指令可以是0-10v的电压信号、220v on/off信号、脉冲序列、modbus指令等。主控单元204基于从外部控制中心接收的控制指令产生控制信号以控制主驱动装置202输出给主电机203的逆变电压的频率及有效值,以控制主电机203的转动。主电机转动同时在绕组上形成感应电压。在图2的实施例中,主控单元204产生的控制信号是pwm控制信号。主控单元204检测主电机203的工作参数,包括转速、逆变电压、绕组交流电流、绕组感应电压等,并基于工作参数改变pwm控制信号的频率或占空比,以控制主电机203的转动。主控单元204可以包括led指示灯,用于指示系统状态及故障信息。在某些实施例中,主控单元204可产生pwm反馈信号以指示主电机203的工作参数,并将该pwm反馈信号输出到外部控制中心。尽管本实施例中主控单元204用以控制主驱动装置202的控制信号以及主控单元204向外部控制中心反馈的信号为pwm信号,在其它实施例中,也可以使用其它形式的控制和反馈信号。
33.根据主控单元204的设定,主电机203可以以数种不同的工作模式运行。在本实施例中,主电机203的工作模式包括恒转速模式、恒扭矩模式或恒功率模式。主控单元204控制主驱动装置202输出的逆变电压的有效值和频率,从而控制主电机203的绕组交流电流的有效值和频率。主电机203根据该频率确定以恒转速模式、恒扭矩模式或恒功率模式之一运行以达到所要求的转动目标参数(转速、扭矩、功率)。
34.在主电机203处于恒转速模式转动的情况下,若是主控单元204检测到主电机203的转速小于目标转速,主控单元204增大输出到主驱动装置202的pwm控制信号的频率,使得主驱动装置202输出到主电机203的逆变电压的频率提高,以提高主电机203的绕组交流电流的频率,从而提升主电机203的转速。反之,若是主控单元204检测到主电机203的转速大于目标转速,主控单元204减小输送到主驱动装置202的pwm控制信号的频率,使得主驱动装置202输出到主电机203的逆变电压的频率降低,以降低主电机203的绕组交流电流的频率,从而降低主电机203的转速。
35.在主电机203处于恒扭矩模式转动的情况下,若是主控单元204检测到主电机203的电流小于目标扭矩对应的绕组交流电流有效值,主控单元204增大输出到主驱动装置202的pwm控制信号的频率,使得主驱动装置202输出到主电机203的逆变电压的频率提高,以提高主电机203的绕组交流电流的频率,从而增大主电机203的转速。根据风机定律,风系统输出的风量和电机转速成正比,由于主电机203的转速增大,风系统输出的风量提高。随着风系统输出的风量提高,风系统负载增大,从而对电机的功率需求上升。而进一步根据风机定律,电机的功率与电机转速的三次方成正比,因此,将引起风系统所需扭矩提高,以满足提高电机功率的需求。因此,主控单元204提高输出到主驱动装置202的pwm控制信号的占空比,使得主驱动装置202输出的逆变电压有效值提升,以使得主电机203的绕组交流电流有效值升高,从而使得主电机203的扭矩增大。反之,若是主控单元204检测到主电机203的电流大于目标扭矩对应的绕组交流电流有效值,主控单元204减小输出到主驱动装置202的pwm控制信号的频率,使得主驱动装置202输出到主电机203的逆变电压的频率降低,以降低主电机203的绕组交流电流的频率,从而减小主电机203的转速。由于主电机203的转速减
小,风系统的所需扭矩变小。此时,主控单元204减小输出到主驱动装置202的pwm控制信号的占空比,使得主驱动装置202输出的逆变电压有效值降低,以使得主电机203的绕组交流电流有效值下降,从而使得主电机203的扭矩减小。
36.在主电机203处于恒功率模式转动的情况下,主控单元204检测到主电机203的逆变电压和交流电流的乘积,即,主电机203的功率。如果主电机203的功率小于目标功率,主控单元204增大输出到主驱动装置202的pwm控制信号的频率和占空比,使得主驱动装置202输出的逆变电压的频率和有效值同步提高,从而使得主电机203的绕组交流电流的频率和有效值同步提高,从而增加主电机203的功率。反之,若是主控单元204检测到的主电机203的功率大于目标功率,主控单元204减小输出到主驱动装置202的pwm控制信号的频率和占空比,使得主驱动装置202输出的逆变电压的频率和有效值同步降低,从而使得主电机203的绕组交流电流的频率和有效值同步下降,从而减小主电机203的功率。
37.恒转速模式中,主控单元204只需要根据外部控制中心发送的控制指令改变输出到主驱动装置202的pwm控制信号的频率来实现对主电机203的转速的调整,故而在设计中易于实现。
38.和恒转速模式相比,恒扭矩和恒功率模式可以确保更小风量的衰减。这是因为,当风系统中发生诸如滤网和风口脏堵等情况时,恒扭矩模式和恒功率模式可以使得风量衰减较少。具体来说,在恒扭矩模式下,当发生诸如滤网和风口脏堵等情况时,风系统的静压升高,负载降低,风量衰减,从而对电机扭矩需求下降。主控单元204通过检测到主电机203的绕组交流电流有效值变小发现主电机203的扭矩变小,从而可以及时通过提高主驱动装置202输出的逆变电压频率来提高主电机203的绕组交流电流频率,以提高主电机203的转速,从而提高风系统所需扭矩。之后,通过提高主驱动装置202输出的逆变电压有效值来提高主电机203的绕组交流电流有效值,从而提高主电机203的扭矩使其达到目标值,由此确保风量稳定。类似地,在恒功率模式下,当风系统中发生诸如滤网和风口脏堵等情况时,风系统的静压升高,负载降低,风量衰减,从而风系统对电机功率的需求减少。主控单元204通过检测主驱动装置202输出的逆变电压和主电机203的绕组交流电流可以发现主电机203的功率变小,从而可以及时通过提高主驱动装置202输出的逆变电压有效值和频率,使得主电机203的绕组交流电流的有效值和频率提高,以提高主电机203的功率,从而将主电机203的功率提升到目标值,由此减少风量衰减。
39.如图2所示,从电机单元20包括从电机i/o接口207、从驱动装置208、反馈单元209和从电机210。通过连接主电机i/o接口206和从电机i/o接口207,主电机单元10和从电机单元20相互通信。在另外的实施例中,从电机i/o接口207也可以是无线控制模块。
40.从驱动装置208通过主电机i/o接口206及从电机i/o接口207分别从电源转换单元201接收直流电源和从主控单元204接收vsp指令信号。该vsp指令信号可以为0-5v的变化电压。从驱动装置208基于从主控单元204接收vsp指令信号的电压值变化来控制从电机210的转速大小。vsp信号的电压值越大,vsp信号控制从驱动装置208使得从电机210的转速更大。由于从驱动装置208设置在从电机单元20中,从驱动装置208到从电机210的导线长度短,可以有效减少由从驱动装置208到从电机210的逆变电压输出产生的电磁干扰。从电机单元20的反馈单元209检测从电机单元20的从电机210的转速,并基于从电机210的转速产生pwm反馈信号输出至主电机单元10的主控单元204。主控单元204基于该反馈信号控制从电机210
的转速。尽管本实施例中反馈单元209向主控单元204反馈的信号为pwm信号,在其它实施例中,也可以使用其它形式的反馈信号。在某些实施例中,主控单元204可以将该反馈信号反馈至外部控制中心。由于本技术中指示主电机203的工作参数的反馈信号和指示从电机210的工作参数的反馈信号均通过主控单元204反馈至外部控制中心,使得接线盒内的接线端口更简单,既能简化接线盒的结构,也能够降低用户接线的复杂度和难度。
41.主控单元204可通过从驱动装置208的vsp信号控制从电机210以转速跟随模式转动。从电机210以转速跟随模式转动时,主控单元204发出的vsp信号控制从驱动装置208驱动从电机210以特定转速转动,该特定转速既可以与主电机203的转速相等、也可以比主电机203的转速小预定的值或比主电机203的转速大预定的值。对主电机单元10和从电机单元20对应的盘管区域的换热能力需求可能相同或不同。控制从电机210以和主电机203相同或不同的转速转动,可以分别控制不同盘管区域的换热能力,以满足对不同盘管区域的换热能力的不同需求。
42.主控单元204可以设定主电机203和从电机210的实际目标转速以避免风系统100发生共振。假设使风系统100发生共振的电机转速为nr,当主电机204和从电机210的转速和共振转速nr的差值分别至少达到预定避振量δ时,风系统100可以避免发生共振。根据本技术的实施例,主控单元204对从外部控制中心接收的指令信号进行解析,以确定对应于该指令信号的主电机204的理想目标转速nm和从电机210的理想目标转速ns,并判断主电机204的理想目标转速nm和从电机210的理想目标转速ns与共振转速nr的差值是否分别达到或超过预定避振量δ。如果主电机203的理想目标转速nm和从电机210的理想目标转速ns与共振转速nr的差值分别达到或超过预定避振量δ,也就是,如果
43.[(nr≥nm+δ)或(nr≤nm-δ)],且
[0044]
[(nr≥ns+δ)或(nr≤ns-δ)],
[0045]
主控单元204将理想目标转速nm设定为主电机203的实际目标转速,且将理想目标转速ns设定为从电机210的实际目标转速。而如果主电机204和从电机210中至少一个的理想目标转速和共振转速nr的差值没有达到预定避振量δ,也就是,(nr<nm+δ)或(nr》nm-δ)或(nr》ns+δ)或(nr<ns-δ),主控单元204调整主电机204和从电机210的实际目标转速。在一个实施例中,若主电机204和从电机210中至少一个的理想目标转速和共振转速nr的差值没有达到预定避振量δ,在主电机203的理想目标转速nm大于或等于从电机210的理想目标转速ns的情况下(即,nm≥ns),主控单元204将主电机203的实际目标转速设定为nm+nδ,并且主控单元204将从电机210的实际目标转速设定为ns-nδ;反之,在主电机203的理想目标转速nm小于从电机210的理想目标转速ns的情况下(即,nm<ns),主控单元204将主电机203的实际目标转速设定为nm-nδ,并且主控单元204将从电机210的实际目标转速设定为ns+nδ。由此,本技术使得风系统避免发生共振。并且,当主电机203和/或从电机210的理想目标转速不符合避振要求时,由于本技术的实施例将主电机203和从电机210中一个的实际目标转设定为大于其理想目标转速,而将另一个的实际目标转速设定为小于其理想目标转速,且使得两电机实际目标转速和各自的理想目标转速的差值的绝对值相同(即,nδ),本技术的风系统在避免发生共振的同时还能够实现系统的期望性能。可以根据需要将n设定为2或2以上的正整数。预定避振量δ值的设定与电机控制精度和共振转速nr有关。可以设定预定避振量δ≥5rpm以适应目前一般风系统电机控制精度的工程能力。如果风系统
电机控制精度的工程能力提高,可以将δ设定为更小的值。当共振转速nr=600~1200rpm时,可以设定预定避振量δ=6rpm。如果共振转速nr更高,可以将预定避振量δ设定为更大的值。
[0046]
如图1所示,本技术的风系统只有一个出风风道103。由于只有一个出风风道103,本技术通过主控单元204来控制从电机单元20的运行的方式尤为有利。对于只有一个出风风道103的风系统,如果主电机单元10和从电机单元20被不同的控制装置分别控制,由于不同的控制装置之间相互独立,无法对两个电机实现完全同步的监测和控制,受两个电机驱动的风机产生的进入共同的出风风道103中的气流(风)的相互干扰使得对两个电机的运行的控制产生不利影响。例如,如果两个电机受彼此独立的不同控制装置控制,当第一电机和第二电机均为恒扭矩模式运行时,第一电机的控制装置接收到外部控制中心发出控制指令指示vsp增大后,第一电机的控制装置识别该指令为扭矩提升。第一电机的控制装置因此提高第一电机的转速来实现风系统所需扭矩的提升,出风风道103中的静压随之升高。随着静压升高,负载降低,风量衰减,从而对电机扭矩需求下降。因此,第二电机的控制装置检测到第二电机的绕组交流电流变小。此时,由于对第二电机叠加有恒扭矩调节特性和外部控制中心关于增大扭矩的控制指令,容易造成第二电机在扭矩调整时出现超调。而超调后,第二电机的控制装置会基于恒扭矩调节特性启动降低第二电机的转速的调整,以减小第二电机的扭矩。并且,在这种第一电机提高扭矩和第二电机降低扭矩的过程中,在出风风道103中由第一电机的风机和第二电机的风机驱动产生的气流存在压差,但vsp指令对第一电机和第二电机的目标扭矩要求是相同的,故而会反过来进入第一电机降低扭矩和第二电机提升扭矩的过程。类似地,这种情况发生在第一电机和第二电机以恒功率模式运行时。当第一电机接收到外部控制中心发出控制指令指示vsp增大后,第一电机的控制装置识别该指令为功率提升。第一电机的控制装置因此提高第一电机的转速和扭矩来实现所需功率的提升,出风风道103中的静压随之升高。随着静压升高,负载降低,风量衰减,从而对电机功率需求下降。因此,第二电机的控制装置检测到第二电机的绕组交流电流变小。此时,由于对第二电机叠加有恒功率调节特性和外部控制中心关于提升功率的控制指令,容易造成第二电机在功率调整时出现超调。而超调后,第二电机的控制装置会基于恒功率调节特性启动降低第二电机的转速和扭矩的调整来降低第二电机的功率。并且,在这种第一电机提高功率和第二电机降低功率的过程中,在出风风道103中由第一电机风机和第二电机的风机驱动产生的气流存在压差,但vsp指令对第一电机和第二电机的目标功率要求是相同的,故而会反过来进入第一电机降低功率和第二电机提升功率的过程。综上,如果两个电机受彼此独立的不同控制装置控制,以恒扭矩或恒功率模式运行的电机始终无法达到其目标扭矩或功率。而在本技术中,主电机203和从电机210的转动都受主控单元204的控制,且由此对主电机203和从电机210的监测和控制可以是同步的,因此,主控单元204不会因从电机210的转速变化而影响主电机203的运行,由此有利于准确控制主电机203和从电机210的转动,使得主电机203在以恒扭矩或恒功率模式运行时能达到其目标扭矩或功率。
[0047]
由于主电机203和从电机210都从主电机单元10的电源转换单元201接收直流高压电源用于驱动主电机203和从电机210,主控单元204可以通过监测从电源转换单元201输出的电压和电流,并根据监测得到电流控制主驱动装置202使得主电机203的交流电流的相位移动来使得风系统的视在功率最低。具体来说,当主电机203和从电机210的交流电流相位
相同时,主电机203和从电机210的交流电流相位发生叠加,使得从电源转换单元201出输出的电流最大,此时风系统的视在功率最大。为使得风系统的视在功率最小,主控单元204监测从电源转换单元201输出的电流,根据监测得到的电源转换单元201输出的电流,主控单元204控制主驱动装置202使得主电机203的交流电流发生相位移动,以使得主电机203的电流相对于从电机210的交流电流发生相位偏移而相互抵消,从而将从电源转换单元201输出的电流最小化。当从电源转换单元201输出的电流最小,从电源转换单元201输出的功率最小。也即,风系统的视在功率最小,因而风系统的功率因数达最大。
[0048]
图3是图2的中的主驱动装置202、从驱动装置208的更详细的示意图。主驱动装置202和从驱动装置208可以包括换向器301。该换向器301可以是电子换向器。换向器301可以将来自电源转换单元201的直流电源转变为主电机203的绕组中流动方向变化的电流,用以驱动主电机203。所述换向器301可以根据主控单元204的控制信号(即pwm控制信号)来变换电机绕组中交流电流的频率。
[0049]
图4是图2所示的主控单元204的示意性框图。如图4所示,主控单元204包括总线401。处理器402、存储器403、大容量存储装置404、输入接口405和输出接口406连接到总线401。在其它实施例中,输入接口和输出接口也可以是无线控制模块。处理器402可以从存储器403或大容量存储装置404中读出程序(或指令),并执行该程序(或指令)以执行对主电机203和从电机210的控制功能;处理器402还可以将数据或指令写入存储器403或大容量存储装置404中。存储器403和大容量存储装置404可以存储程序(指令)或数据。通常,存储器403具有比大容量存储装置404的访问速度快的访问速度,而大容量存储装置404具有比存储器403的存储器尺寸大的存储器尺寸。通过执行存储器403中的指令,处理器可以控制存储器403、大容量存储装置404、输入接口405和输出接口406。
[0050]
输入接口405从外部控制中心接收输入,并将从外部控制中心接收的输入转换成处理器402可识别的信号。输入接口405也从主电机单元10的检测装置获取主电机203的工作参数,并转换成处理器402可识别的信号。输入接口405还从反馈单元209接收指示从电机210的转速的反馈信号。输出接口从处理器402接收控制信号,并将控制信号转换为适合主驱动装置202和从驱动装置208的输出。
[0051]
在操作中,当从外部控制中心接收到控制指令后,处理器402根据来自外部控制中心的输入来执行所需的功能;当从主电机单元10的检测装置获取到主电机203的工作参数,处理器402根据工作参数通过主驱动装置202控制主电机203的转动;当从反馈单元209接收到指示从电机210的转速的反馈信号,处理器402根据反馈信号通过从驱动装置208控制从电机210的转动。同样在操作中,当从处理器402接收到控制信号时,输出接口406将控制信号输出到主驱动装置202及从驱动装置208以控制主电机203和从电机210的转动。在需要时,输出接口406将指示主电机203和从电机210的工作参数的信号输出至外部控制中心。
[0052]
图5是风系统的电机组件的控制方法的一个流程图。
[0053]
在步骤501,控制流程开始。
[0054]
在步骤502,给风系统供电,风系统初始化。
[0055]
在步骤503,主电机单元10的主控单元204监控来自外部控制中心的控制指令。控制指令可以是0-10v的变化电压信号、220v on/off信号、脉冲序列、modbus指令等。
[0056]
在步骤504,主电机单元10的主控单元204判断来自外部控制中心的控制指令是否
指示启动风系统。如果该控制指令不是指示启动风系统,回到步骤503,主控单元204继续监控来自外部控制中心的控制指令。如果控制指令指示启动风系统,执行步骤505。
[0057]
在步骤505,主控单元204向主驱动装置202发出控制信号,主控单元204通过主驱动装置202驱动主电机203以启动主电机203。
[0058]
在步骤506,主控单元204判断主电机203是否启动。主控单元204通过监测主电机203的转速是否达到其最低转速来判断主电机203是否已经启动。如果主控单元204监测到主电机203未达其最低转速,回到步骤505,主控单元204通过主驱动装置202驱动主电机203以启动主电机203。如果主控单元204监测到主电机203已达其最低转速,主控单元204判断主电机203完成启动,执行步骤507。
[0059]
在步骤507,主控单元204向主驱动装置202发出控制信号,以控制主驱动装置202输出的逆变电压的频率和有效值,从而控制主电机203绕组中交流电流的频率和有效值,使得主电机203按预定工作模式转动。根据主控单元204的设定,主电机203以恒转速、恒扭矩或恒功率模式之一转动。通过控制主驱动装置202输出的逆变电压的频率,主控单元204也可以使得主电机203避开使得风系统发生共振的共振转速。
[0060]
在步骤508,主控单元204通过主电机i/0接口向从电机i/o接口发出vsp信号。在包括多个从电机单元的风系统的实施例中,主控单元204根据需要向选定的从电机单元发送vsp信号。
[0061]
在步骤509,从驱动装置208根据来自主控单元204的vsp信号控制从电机210以预定的跟随模式的转动。根据vsp信号的电压值的大小,从电机210以和主电机203相同的转速转动,或以比主电机203更高或更低的转速转动。vsp信号也可以使得从电机210避开使得风系统发生共振的共振转速。
[0062]
在步骤510,主控单元204根据检测到的主电机203的工作参数和接收到的指示从电机210的工作参数的反馈信号(该反馈信号由反馈单元209提供)判断主电机203和210的运行状态。如果主控单元204判断主电机203的工作参数(如,转速、扭矩、功率)及从电机210的工作参数(如,转速)达目标要求,回到步骤503,主控单元204继续监控来自外部控制中心的控制指令。如果主控单元204判断主电机203的工作参数(如,转速、扭矩、功率)及从电机210的工作参数(如,转速)未达目标要求,执行步骤511。
[0063]
在步骤511,如果主控单元204判断主电机203的工作参数(如,转速、扭矩、功率)未达目标要求,主控单元204做出对应处理,如使风系统停机、或通过主控单元204的led灯做出故障指示等。如果主控单元204判断主电机203的工作参数(如,转速)未达目标值,主控单元204做出对应处理,如使得从电机210停机、使风系统停机、或通过主控单元204的led灯做出故障指示等。
[0064]
在步骤512,控制流程结束。
[0065]
如图5所示的流程图的程序,可以存储在图4所示的主控单元204的存储器403或大容量存储装置404中,并且可以由处理器402执行。
[0066]
本技术的实施例至少包括以下有益技术效果:
[0067]
1.因主电机和从电机均受主电机的主控单元控制,对主电机和从电机的监测和控制可以是同步的,从而避免因主电机和从电机的风机驱动产生的气流在单个出风风道中的相互干扰导致的对主电机控制的不准确性,因此主电机在以恒扭矩或恒功率模式运行时能
达到其目标扭矩或功率。
[0068]
2.电机组件可以恒转速、恒扭矩和恒功率模式之一运行。因此,本技术的风系统工作模式灵活,既提供设计简单的工作模式,也提供风量衰减小的工作模式,可以满足不同的应用需求。
[0069]
3.主电机单元、从电机单元和接线盒的位置布置及连接关系使得节约导线长度,节省成本。
[0070]
4.由于本技术中指示主电机和从电机的工作参数的反馈信号均通过主控单元反馈至外部控制中心,使得接线盒内的接线端口更简单,既能简化接线盒的结构,也能够降低用户接线的复杂度和难度。
[0071]
5.由于主驱动装置设置在主电机单元中,从驱动装置设置在从电机单元中,主驱动装置到主电机的导线长度以及从驱动装置到从电机的导线长度短,可以有效减少电磁干扰。
[0072]
6.本技术通过对主电机和从电机的实际目标转速的适当设定,可以避免风系统发生避振,且同时实现风系统的期望性能。
[0073]
应该理解的是,在此公开并限定的本技术延伸到正文和/或附图中提及的或显而易见的两个或多个个别特征的所有可选择的组合中。所有这些不同的组合构成本发明各种可选择的方面。在此描述的实施例解释了用于实现本技术的一个方式,并且将使本领域的其它技术人员能够实现本发明。权利要求书应该解释为包括由已有技术允许延伸的可选择的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1