扫风设备的控制方法、装置、电风扇及可读存储介质与流程
1.本发明涉及扫风控制技术领域,具体涉及一种扫风设备的控制方法、装置、电风扇及可读存储介质。
背景技术:
2.随着人工智能技术的发展,电风扇的摇头控制日益智能化。目前市场上的智能电风扇通常具备智能摇头模式,即ai摇头模式。在多人扫风情景中,智能电风扇能够基于人体位置确定扫风范围,但是若中途发生人体位置或人体数量的变化,即人体分布状态发生变化时,电风扇仍然基于当前的扫风范围进行摇头控制,此时需要人为操作“智能寻人”这一类的功能按键,以使电风扇重新确定扫风范围,存在操作不智能、影响用户体验的问题。
技术实现要素:
3.有鉴于此,本发明实施例提供了一种扫风设备的控制方法、装置、电风扇及可读存储介质,以解决人体分布状态发生变化,电风扇仍然基于当前的扫风范围进行摇头控制,此时需要人为操作“智能寻人”这一类的功能按键,以使电风扇重新确定扫风范围,操作不智能、影响用户体验的问题。
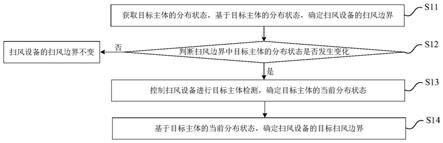
4.根据本发明的第一方面,本发明实施例提供了一种扫风设备的控制方法,包括:获取目标主体的分布状态,基于所述目标主体的分布状态,确定扫风设备的扫风边界;判断所述扫风边界中所述目标主体的分布状态是否发生变化;当所述目标主体的分布状态发生变化时,控制所述扫风设备进行目标主体检测,确定所述目标主体的当前分布状态;基于所述目标主体的当前分布状态,确定所述扫风设备的目标扫风边界。
5.本发明实施例提供的扫风设备的控制方法,通过获取目标主体的分布状态,基于目标主体的分布状态,确定扫风设备的扫风边界,当检测到扫风边界内的目标主体的分布状态发生时,基于目标主体的当前分布状态重新确定扫风设备的扫风边界,即目标扫风边界。该方法通过实时检测目标主体的分布状态,以便在扫风边界内目标主体的分布状态发生变化时能够自动重新确定出扫风设备的目标扫风边界,保证扫风设备的目标扫风边界能够最大化的覆盖所有目标主体,该过程无需人为操作,避免了繁琐的人为操作,使得扫风设备的控制更加智能,提高了用户体验。
6.结合第一方面,在第一方面的第一实施方式中,所述控制所述扫风设备进行目标主体检测,确定所述目标主体的当前分布状态,包括:提高所述扫风设备的扫风速率;基于提高后的所述扫风速率,控制所述扫风设备检测所述目标主体,确定所述目标主体的当前分布状态。
7.本发明实施例提供的扫风设备的控制方法,当检测到目标主体的分布状态发生变化时,控制扫风设备提高扫风速率,并控制扫风设备以提高后的扫风速率在扫风边界内检测目标主体,从而确定出对应于目标主体的当前分布状态,并基于当前分布状态重新确定扫风设备的扫风边界。该方法通过调节扫风设备的扫风速率以检测目标主体,确定目标主
体的分布状态,实现了目标主体的快速检测,提高了目标主体的检测效率。同时,基于扫风设备的扫风速率能够直观确定扫风设备当前所处的状态,以便用户区分扫风设备的扫风状态和目标主体检测状态。
8.结合第一方面第一实施方式,在第一方面的第二实施方式中,所述控制所述扫风设备检测所述目标主体,确定所述目标主体的当前分布状态,包括:控制所述扫风设备在所述扫风边界内往复转动,判断所述扫风边界内是否识别到所述目标主体;当在所述扫风边界内识别到所述目标主体时,基于识别到的所述目标主体的当前位置,确定所述目标主体的当前分布状态。
9.结合第一方面第二实施方式,在第一方面的第三实施方式中,所述控制所述扫风设备检测所述目标主体,确定所述目标主体的当前分布状态,还包括:当在所述扫风边界内未识别到所述目标主体时,判定所述目标主体离开所述扫风边界,则控制所述扫风设备优先转向当前扫风位置最近的扫风极限边界,进行所述目标主体的检测。
10.本发明实施例提供的扫风设备的控制方法,当扫风设备在扫风边界内往复转动过程中识别到目标主体时,基于识别到的目标主体的当前位置,确定目标主体的当前分布状态,当扫风设备在扫风边界内往复转动过程中未识别到目标主体时,即可确定目标主体已经离开扫风设备的扫风边界,此时可以控制扫风设备优先转向当前扫风位置最近的扫风极限边界以进行目标主体的检测。由此在准确识别当前分布状态的同时,提高了目标主体的检测效率,实现了目标主体的当前分布状态的快速确定。
11.结合第一方面第二实施方式,在第一方面的第四实施方式中,所述判断所述扫风边界内是否识别到所述目标主体,包括:在所述扫风设备以当前转动方向转动至一扫风边界的过程中,判断是否识别到所述目标主体;当未识别到所述目标主体时,更换所述扫风设备的转动方向,控制所述扫风设备以所述更换后的转动方向转动至另一扫风边界;判断所述扫风设备在转动至另一扫风边界的过程中是否识别到所述目标主体。
12.本发明实施例提供的扫风设备的控制方法,通过扫风设备在扫风边界内往复转动以识别当前扫风边界内是否存在目标主体,能够实时的检测目标主体的分布状态,以便根据目标主体的分布状态调整扫风设备的扫风边界。
13.结合第一方面,在第一方面的第五实施方式中,所述基于所述目标主体的当前分布状态,确定所述扫风设备的目标扫风边界,包括:基于所述目标主体的当前分布状态,确定所述扫风设备的扫风角度;基于所述扫风角度,确定所述扫风设备的目标扫风边界。
14.本发明实施例提供的扫风设备的控制方法,通过目标主体的当前分布状态,确定扫风设备的扫风角度,再基于该扫风角度确定出扫风设备目标扫风边界,避免出现目标主体离开扫风边界而导致无法被扫风设备吹到的问题,保证扫风设备的目标扫风边界能够最大化的覆盖目标主体。
15.结合第一方面第五实施方式,在第一方面的第六实施方式中,所述基于所述目标主体的当前分布状态,确定所述扫风设备的扫风角度,包括:基于所述目标主体的当前分布状态,确定所述目标主体的所处位置;判断所述目标主体的所处位置是否超过所述扫风设备的扫风边界;当所述目标主体的所处位置超过所述扫风边界但未超过所述扫风设备的扫风极限边界时,基于所述目标主体所在的位置扩大所述扫风设备的扫风角度。
16.结合第一方面第六实施方式,在第一方面的第七实施方式中,所述基于所述目标
主体的当前分布状态,确定所述扫风设备的扫风角度,还包括:当所述目标主体的所处位置未超过所述扫风边界时,基于所述目标主体的所处位置确定所述扫风设备的扫风角度。
17.本发明实施例提供的扫风设备的控制方法,通过确定目标主体所处的位置,判断目标主体的所在位置是否超过扫风设备的扫风边界,当目标主体所在的位置超过扫风边界但未超过扫风极限边界时,此时可以基于目标主体所在的位置扩大扫风设备的扫风角度;当目标主体的所处位置未超过扫风边界时,则可以基于扫风边界内目标主体的位置重新确定扫风设备的扫风角度,以使扫风设备能够根据扫风角度确定出目标扫风边界,保证扫风设备的扫风边界能够随着目标主体分布状态的变化而变化,实现了智能扫风,提高了用户体验。
18.结合第一方面第五实施方式至第七实施方式中的任一实施方式,在第一方面的第八实施方式中,所述基于所述扫风角度,确定所述扫风设备的目标扫风边界,包括:获取所述扫风设备的转动补偿角度;基于所述转动补偿角度以及所述扫风角度,确定所述扫风设备的目标扫风边界。
19.本发明实施例提供的扫风设备的控制方法,通过获取扫风设备的转动补偿角度,并基于转动补偿角度以及扫风角度,确定扫风设备的目标扫风边界,由此保证了目标扫风边界的准确确定,进一步保证了目标扫风边界能够最大化的覆盖目标主体。
20.结合第一方面第六实施方式,在第一方面的第九实施方式中,所述获取目标主体的分布状态,包括:获取扫风设备的工作模式;判断所述工作模式是否为智能摇头模式;当所述工作模式为智能摇头模式时,检测所述扫风设备的扫风极限区域内是否存在目标主体;当所述扫风设备的扫风极限区域内存在所述目标主体时,获取所述目标主体的分布状态。
21.结合第一方面第九实施方式,在第一方面的第十实施方式中,所述获取目标主体的分布状态,还包括:当所述扫风设备的扫风极限区域内不存在所述目标主体时,切换所述扫风设备的运行模式。
22.本发明实施例提供的扫风设备的控制方法,当扫风设备处于智能摇头模式时,通过检测扫风设备的扫风极限区域内是否存在目标主体,当检测到扫风设备的扫风极限区域内存在目标主体时,获取目标主体的分布状态,当检测到扫风设备的扫风极限区域内不存在目标主体时,切换扫风设备的运行模式。该方法基于扫风设备的扫风极限区域内是否存在目标主体确定扫风设备的运行模式,以实现扫风设备的自适应运行,避免多余的电能消耗。
23.结合第一方面第十实施方式,在第一方面的第十一实施方式中,所述扫风设备的控制方法还包括:判断所述扫风设备以切换后的运行模式持续工作的预设时长内是否检测到所述扫风极限区域存在所述目标主体;当所述预设时长内检测到所述扫风极限区域内存在所述目标主体时,执行所述获取目标主体的分布状态的步骤。
24.结合第一方面第十一实施方式,在第一方面的第十二实施方式中,所述扫风设备的控制方法还包括:当所述预设时长内未检测到所述扫风极限区域内存在所述目标主体时,控制所述扫风设备进入待机状态。
25.本发明实施例提供的扫风设备的控制方法,在扫风设备以切换后的运行模式持续工作预设时长的过程中,持续检测扫风设备的扫风极限区域内是否存在目标主体,当检测
到扫风设备的扫风极限区域内存在目标主体时,获取扫风设备目标主体的分布状态,以确定目标扫风边界;当未检测到目标主体时,控制扫风设备进入待机状态。该方法通过在预设时长内持续检测目标主体以确定扫风设备的运行模式,从而实现了扫风设备的自适应运行,在避免多余电能消耗的同时提高了用户体验。
26.根据本发明的第二方面,本发明实施例提供了一种扫风设备的控制装置,包括:获取模块,用于获取目标主体的分布状态,基于所述目标主体的分布状态,确定扫风设备的扫风边界;判断模块,用于判断所述扫风边界中所述目标主体的分布状态是否发生变化;控制模块,用于当所述目标主体的分布状态发生变化时,控制所述扫风设备进行目标主体寻找,确定所述目标主体的当前分布状态;确定模块,用于基于所述目标主体的当前分布状态,确定所述扫风设备的目标扫风边界。
27.本发明实施例提供的扫风设备的控制装置,通过检测目标主体的分布状态,以便在扫风边界内目标主体的分布状态发生变化时能够自动重新确定出扫风设备的目标扫风边界,保证扫风设备的目标扫风边界能够最大化的覆盖所有目标主体,该过程无需人为操作,避免了繁琐的人为操作,使得扫风设备的控制更加智能,提高了用户体验。
28.根据第三方面,本发明实施例提供了一种扫风设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或第一方面任一实施方式所述的扫风设备的控制方法。
29.根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使计算机执行第一方面或第一方面任一实施方式所述的扫风设备的控制方法。
附图说明
30.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
31.图1是根据本发明实施例的扫风设备的控制方法的流程图;
32.图2是根据本发明实施例的扫风设备的控制方法的另一流程图;
33.图3是根据本发明实施例的扫风设备的控制方法的另一流程图;
34.图4是根据本发明实施例的扫风设备扫风范围的示意图;
35.图5是根据本发明实施例的目标主体的位置变化示意图;
36.图6是根据本发明实施例的扫风设备的扫风角度变化示意图;
37.图7是根据本发明实施例的扫风设备的控制装置的结构框图;
38.图8是本发明实施例提供的电风扇的硬件结构示意图。
具体实施方式
39.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是
本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.在多人扫风情景中,智能电风扇能够基于人体位置确定扫风范围,但是若中途发生人体位置或个数的变化,即人体分布状态发生变化时,电风扇仍然基于当前的扫风范围进行摇头控制,此时需要人为操作“智能寻人”这一类的功能键,以使电风扇重新确定扫风范围,存在操作不智能、影响用户体验的问题。
41.基于此,本发明技术方案通过自动检测电风扇扫风范围内的目标主体,以便根据目标主体的分布状态自动重新确定电风扇的扫风边界,继而根据扫风边界确定扫风区域,保证电风扇的扫风区域能够覆盖所有目标主体。
42.根据本发明实施例,提供了一种扫风设备的控制方法的实施例,需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
43.在本实施例中提供了一种扫风设备的控制方法,可用于具有扫风功能的电器,如落地扇、台式电扇、电风扇等,图1是根据本发明实施例的扫风设备的控制方法的流程图,如图1所示,该流程包括如下步骤:
44.s11,获取目标主体的分布状态,基于目标主体的分布状态,确定扫风设备的扫风边界。
45.目标主体可以是一个,可以是两个,也可以为多个。目标主体的分布状态为目标主体在扫风设备对应的扫风范围内的分布情况,具体地,目标主体的分布状态可以包括目标主体的聚集状态以及目标主体的人数变化状态。其中,目标主体的聚集状态为目标主体的聚集程度,可以通过各个目标主体的所处位置予以表征。若各个目标主体所处位置较为密集,则表征目标主体处于聚集态;若各个目标主体所处位置较为分散,则表征目标主体处于分散态。其中,目标主体的人数变化状态为扫风范围内目标主体的人数变化,包括目标主体人数的增加和目标主体人数的减少。
46.目标主体的分布状态可以通过扫风设备上设置的摄像头检测获取,摄像头的视野可以随扫风设备的转动进行改变,由此能够实时检测目标主体的位置以及人数,以确定出目标主体的分布状态。
47.扫风设备的扫风边界为扫风设备对应的当前扫风范围,即由目标主体所在的位置可以确定扫风设备对应的两个扫风边界,两个扫风边界构成扫风设备的扫风范围。如图4所示,x线为左扫风边界,y线为右扫风边界,x线与y线所构成的夹角之间的范围即为扫风设备的当前扫风范围。需要说明的是,若当前只有一个目标主体,则扫风设备可以定向吹风,并跟踪该目标主体的移动而改变吹风方向。
48.s12,判断扫风边界中目标主体的分布状态是否发生变化。
49.目标主体的分布状态发生变化包括扫风边界内目标主体的人数变化以及目标主体所处位置的变化。扫风设备基于其实时检测到的目标主体,可以确定出扫风边界中目标主体的分布状态是否发生变化。当扫风边界中目标主体的分布状态发生变化时,执行步骤s13,否则扫风设备的扫风边界不变,并继续以当前的扫风边界进行左右扫风,不进行目标主体的寻找检测。
50.s13,当目标主体的分布状态发生变化时,控制扫风设备进行目标主体检测,确定目标主体的当前分布状态。
51.当扫风设备检测到目标主体的分布状态发生变化时,表示扫风设备的扫风边界可能需要重新确定,此时扫风设备可以对其当前扫风范围或扫风极限区域内的目标主体进行检测,以重新确定目标主体的分布状态。
52.具体地,扫风设备可以判断当前扫风边界内目标主体人数是否发生变化,扫风设备可以通过摄像头检测位于当前扫风边界内的目标主体,以确定扫风设备内的目标主体数量是否减少,若目标主体数量减少则可以确定存在离开扫风边界的目标主体,此时扫风设备可以在其扫风极限区域内执行目标主体的检测,以确定目标主体的当前分布状态。
53.具体地,当扫风边界内的目标主体人数未发生变化时,扫风设备还可以检测目标主体所处位置是否发生变化,扫风设备可以通过摄像头检测位于当前扫风边界内的目标主体,以确定当前各个目标主体所处的位置,以确定目标主体的聚集程度。若目标主体所处位置由分散变得密集或由密集变得分散,此时扫风设备可以基于密集分布或分散分布的目标主体重新确定其分布状态。
54.以图4为例,a线与b线的夹角为摄像头视野,摄像头视野可以随着扫风设备的转动改变,以对扫风边界内目标主体的分布状态进行实时检测。
55.s14,基于目标主体的当前分布状态,确定扫风设备的目标扫风边界。
56.目标扫风边界为扫风设备根据目标主体的当前分布状态确定出的实际扫风范围。具体地,扫风设备根据目标主体的当前分布状态可以确定出覆盖所有目标主体的最小扫风角度,该最小扫风角度分别对应左扫风边界和右扫风边界,扫风设备根据当前的左扫风边界和右扫风边界更新扫风设备的扫风边界,以确定出扫风设备的目标扫风边界,继而使得扫风设备能够按照更新后的目标扫风边界进行扫风。
57.本实施例提供的扫风设备的控制方法,通过实时检测目标主体的分布状态,以便在扫风边界内目标主体的分布状态发生变化时能够自动重新确定出扫风设备的目标扫风边界,保证扫风设备的目标扫风边界能够最大化的覆盖所有目标主体,该过程无需人为操作,避免了繁琐的人为操作,使得扫风设备的控制更加智能,提高了用户体验。
58.在本实施例中提供了一种扫风设备的控制方法,可用于具有扫风功能的电器,如落地扇、台式电扇、电风扇等,图2是根据本发明实施例的扫风设备的控制方法的流程图,如图2所示,该流程包括如下步骤:
59.s21,获取目标主体的分布状态,基于目标主体的分布状态,确定扫风设备的扫风边界。详细说明参见上述实施例对应步骤s11的相关描述,此处不再赘述。
60.s22,判断扫风边界中目标主体的分布状态是否发生变化。详细说明参见上述实施例对应步骤s12的相关描述,此处不再赘述。
61.s23,当目标主体的分布状态发生变化时,控制扫风设备进行目标主体检测,确定目标主体的当前分布状态。
62.具体地,上述步骤s23可以包括如下步骤:
63.s231,提高扫风设备的扫风速率。
64.扫风设备的扫风速率由其内设置的步进电机速率确定。当检测到目标主体离开扫风设备的扫风边界时,此时扫风设备可以控制步进电机速率提高,从而提高扫风设备的扫
风速率,以便扫风设备的快速转动带动摄像头的转动,从而提高目标主体的检测效率。具体地,若步进电机的当前速率为v1,当扫风设备检测到目标主体离开扫风边界时,此时可以控制步进电机速率在目标主体检测过程中提高至v2,其中,提高的步进电机速率可以根据摄像头获取目标主体的图像时间设定,以保证扫风设备能够快速完成目标主体的检测。
65.s232,基于提高后的扫风速率,控制扫风设备检测目标主体,确定目标主体的当前分布状态。
66.若扫风设备检测到当前扫风边界内的目标主体人数并未发生改变,则扫风设备以其提高后的扫风速率进行扫风的同时在当前扫风边界内检测目标主体的分布位置,以确定目标主体的聚集状态是否发生变化。具体地,若位于扫风边界处的目标主体所处位置发生改变时,此时需要可以重新获取目标主体的分布状态以确定目标主体的聚集状态,并根据该聚集状态更新扫风设备的扫风角度。例如,若位于扫风边界处的目标主体所处位置扫风边界内部移动时,当前的扫风边界可以基于目标主体的聚集状态缩小扫风角度。
67.若扫风设备检测到当前扫风边界内的目标主体人数发生改变,则扫风设备以其提高后的扫风速率进行扫风的同时在扫风极限区域内进行摆头,以检测目标主体在扫风极限区域内的分布位置,以重新确定目标主体的分布位置,即目标主体的当前分布状态。其中,扫风极限区域为扫风设备的最大扫风范围。扫风设备的扫风极限区域可以通过扫风设备的摇头参数确定,其中,扫风设备的摇头参数内置于扫风设备处理器中。不同的摇头参数,扫风极限区域不同,如图4所示的左极限位置和右极限位置,左极限位置和右极限位置构成扫风设备的扫风极限区域。以图5为例,当前位于扫风极限区域内的目标主体的数目为3,位置a为目标主体变更前的位置,位置a’为目标主体变更后的位置,基于目标主体的位置变更们可以重新确定出目标主体所对应的分布状态。
68.扫风设备根据目标主体分布状态的改变,可以重新确定出覆盖所有目标主体的两个扫风边界,即目标扫风边界,以使扫风设备基于该目标扫风边界进行扫风。
69.可选地,上述步骤s232可以包括如下步骤:
70.(1)控制扫风设备在扫风边界内往复转动,判断扫风边界内是否识别到目标主体。
71.扫风设备可以对其扫风边界内目标主体的分布状态进行实时检测,当检测扫风边界内的目标主体的分布位置发生变化时,控制扫风设备在当前扫风边界内左右摆头,即扫风设备往复运动以确定其扫风边界内是否识别到目标主体。当识别到目标主体时,执行步骤(2),否则执行步骤(3)。
72.作为本技术一个可选的实施方式,其中步骤(1)可以包括:
73.11)在扫风设备以当前转动方向转动至一扫风边界的过程中,判断是否识别到目标主体。
74.扫风设备可以在扫风边界内往复转动以识别是否存在目标主体。当扫风设备以当前转动方向转动至一扫风边界的过程中未识别到目标主体时,执行步骤12),否则表示目标主体仍处于扫风设备的扫风边界内,此时可以基于扫风边界内目标主体的当前分布状态进一步确定扫风设备的目标扫风边界。
75.12)更换扫风设备的转动方向,控制扫风设备以更换后的转动方向转动至另一扫风边界。
76.当扫风设备转动至当前转动方向对应的扫风边界时仍未识别到目标主体,此处扫
风设备可以更换转动方向,即以当前转动方向相反的方向进行转动,直至转动至另一个扫风边界。
77.13)判断扫风设备在转动至另一扫风边界的过程中是否识别到目标主体。
78.扫风设备在转动至另一个扫风边界的过程中继续进行目标主体的检测,以便确定是否存在目标主体。当扫风设备在转动至另一个扫风边界的过程中未识别到目标主体时,表示目标主体离开扫风设备的扫风边界,否则表示目标主体仍处于电风扇的扫风边界内,此时可以基于扫风边界内目标主体的当前分布状态进一步确定扫风设备的目标扫风边界。
79.需要说明的是:当扫风设备转动至扫风边界时可以进行转动角度补偿,判断经过转动角度补偿后是否识别到目标主体。转动角度补偿为扫风设备在转到扫风边界时多转一个补偿角度。扫风设备在进行目标主体检测时,当扫风设备摇头至扫风边界时可以多转一个补偿角度,以弥补摄像头成像角度小的缺陷,实现目标主体的最大化检测,避免目标主体的检测遗漏。如图4所示的c线与x线之间的夹角以及d线与y线之间夹角均为转动的补偿角度。其中,补偿角度可以为10
°
,也可以为其他角度,本领域技术人员可以根据实际需要确定。
80.(2)基于识别到的目标主体的当前位置,确定目标主体的当前分布状态。
81.扫风设备在其扫风边界内识别到分布状态发生变化的目标主体时,可以获取当前目标主体在扫风边界内所处的位置,并基于当前扫风边界内各个目标主体所处的位置,确定扫风边界内目标主体的当前分布状态。
82.(3)当在扫风边界内未识别到目标主体时,判定目标主体离开扫风边界,则控制扫风设备优先转向当前扫风位置最近的扫风极限边界,进行目标主体的检测。
83.扫风极限边界为扫风设备的扫风极限区域所对应的扫风边界。当扫风设备在其扫风边界内识别未到分布状态发生变化的目标主体时,可以判定该目标主体已经离开扫风边界,此时可以控制扫风在其扫风极限区域内检测目标主体。其中,在扫风设备开始在扫风极限区域内进行目标主体检测时,扫风设备可以优先转向与当前扫风位置最接近的扫风极限边界,以提高目标主体的检测效率。
84.s24,基于目标主体的当前分布状态,确定扫风设备的目标扫风边界。
85.具体地,上述步骤s24可以包括:
86.s241,基于目标主体的当前分布状态,确定扫风设备的扫风角度。
87.扫风设备根据各目标主体所处位置以及目标主体的个数可以确定出目标主体的当前分布状态,并基于目标主体的当前分布状态可以确定出第一个目标主体所在的位置以及最后一个目标主体所在的位置,第一个目标主体所在的位置、最后一个目标主体所在的位置以及扫风设备的扫风弧线可以形成一个扇形。其中,扫风设备的扫风角度为第一个目标主体所在的位置以及最后一个目标主体所在的位置所构成的夹角,即第一个目标主体所在的位置
‑
电风扇扫风弧线
‑
最后一个目标主体所在的位置所构成的夹角。
88.具体地,上述步骤s241可以包括:
89.(1)基于目标主体的当前分布状态,确定目标主体的所处位置。
90.基于目标主体的当前分布状态可以确定出各个目标主体当前所处位置。以图5为例,基于目标主体的当前分布状态可以确定出3个目标主体当前所处的位置,例如,位置a为目标主体变更前的位置,位置a’为目标主体变更后的位置。
91.(2)判断目标主体的所处位置是否超过扫风设备的扫风边界。
92.扫风设备在扫风边界内来回摆动,同时通过设置在扫风设备上的摄像头以对目标主体进行实时检测,由此可以确定目标主体当前所处位置是否处于扫风边界内,即目标主体所处位置是否超过扫风边界。当目标主体所处位置未超过扫风设备的扫风边界时,执行步骤(4);当目标主体所处位置超过扫风设备的扫风边界时,进一步判断目标主体所在的位置是否超过扫风设备的扫风极限区域,当目标主体所处位置未超过扫风设备的扫风极限区域时,执行步骤(3),否则,扫风设备按按照当前位于扫风极限区域内的目标主体重新确定目标主体的分布状态,并根据重新确定的目标主体的分布状态确定目标扫风边界。
93.(3)基于目标主体所在的位置扩大扫风设备的扫风角度。
94.当目标主体的所处位置超过扫风边界但未超过扫风设备的扫风极限边界时,表示扫风设备的扫风范围可以覆盖所有目标主体,此时,扫风设备可以获取超出扫风边界的目标主体所处位置,并基于该目标主体当前所处位置扩大扫风设备的扫风角度,即将扫风设备的扫风角度扩大至超出扫风边界的目标主体所处位置。如图5所示,位置a为目标主体变更前的位置,左扫风边界x线和右扫风边界y线之间的扫风范围为目标主体变更前的扫风区域;当目标主体变更至位置a’时,右扫风边界y线变更至位置a’,得到变更后的右扫风边界y线。基于左扫风边界x线以及变更后的右扫风边界y线即可得到电风扇的扫风角度,如图6所示。
95.(4)基于目标主体的所处位置确定扫风设备的扫风角度。
96.当目标主体的所处位置未超过扫风边界时,表示目标主体仍然处于扫风设备的扫风边界内,此时扫风设备可以基于目标主体当前所处位置重新确定其扫风角度,即第一个目标主体所在的位置以及最后一个目标主体所在的位置所构成的夹角。
97.需要说明的是,当存在3个及以上的目标主体时,若第一个目标主体所处位置以及最后一个目标主体所处位置未发生变化,仅是其他目标主体在第一目标主体所处位置和最后一个目标主体所处位置之间发生了变动,则扫风角度不变,扫风设备继续以当前扫风角度进行扫风。
98.s242,基于扫风角度,确定扫风设备的目标扫风边界。
99.扫风设备根据其确定出的扫风角度可以确定出扫风设备所对应的目标扫风边界,继而使得扫风设备能够按照更新后的目标扫风边界进行扫风。
100.具体地,上述步骤s242可以包括:
101.(1)获取扫风设备的转动补偿角度。
102.转动补偿角度为扫风设备在转到扫风边界时多转的角度。扫风设备摇头至扫风边界时可以多转一个补偿角度,在弥补摄像头成像角度小,避免目标主体的检测遗漏这一缺陷的基础上,能够最大化的实现扫风范围覆盖所有目标主体。
103.(2)基于转动补偿角度以及扫风角度,确定扫风设备的目标扫风边界。
104.在扫风角度的基础上加上转动补偿角度作为扫风设备的最终扫风角度,并基于该最终扫风角度计算扫风设备的目标扫风边界,由此实现了扫风设备扫风范围的最大化。
105.本实施例提供的扫风设备的控制方法,通过调节扫风设备的扫风速率以检测目标主体,确定目标主体的分布状态,实现了目标主体的快速检测,提高了目标主体的检测效率。同时,基于扫风设备的扫风速率能够直观确定扫风设备当前所处的状态,以便用户区分
扫风设备的扫风状态和目标主体检测状态。当确定目标主体已经离开扫风设备的扫风边界,控制扫风设备优先转向当前扫风位置最近的扫风极限边界以进行目标主体的检测,提高了目标主体的检测效率,实现了目标主体的当前分布状态的快速确定。
106.本实施例提供的扫风设备的控制方法,通过扫风设备在扫风边界内往复转动以识别当前扫风边界内是否存在目标主体,能够实时的检测目标主体的分布状态,以便根据目标主体的分布状态调整扫风设备的扫风边界。通过目标主体的当前分布状态,确定扫风设备的扫风角度,再基于该扫风角度确定出扫风设备目标扫风边界,避免出现目标主体离开扫风边界而导致无法被扫风设备吹到的问题,保证扫风设备的目标扫风边界能够最大化的覆盖目标主体。基于目标主体所在的位置扩大扫风设备的扫风角度,以使扫风设备能够根据扫风角度确定出目标扫风边界,保证扫风设备的扫风边界能够随着目标主体分布状态的变化而变化,实现了智能扫风,提高了用户体验。
107.在本实施例中提供了一种扫风设备的控制方法,可用于具有扫风功能的电器,如落地扇、台式电扇、电风扇等,图3是根据本发明实施例的扫风设备的控制方法的流程图,如图3所示,该流程包括如下步骤:
108.s31,获取目标主体的分布状态,基于目标主体的分布状态,确定扫风设备的扫风边界。
109.具体地,上述步骤s31可以包括如下步骤:
110.s311,获取扫风设备的工作模式。
111.扫风设备的工作模式用于表征扫风设备当前的运行状态。扫风设备可以对其运行状态中的运行数据进行实时监测,以确定扫风设备的工作模式。具体地,扫风设备的工作模式可以包括待机模式、智能摇头模式和普通扫风模式等,此处对工作模式的种类不作限定,本领域技术人员可以根据实际情况确定。
112.s312,判断工作模式是否为智能摇头模式。
113.基于当前工作模式的运行参数确定其是否处于智能摇头模式。当工作模式为智能摇头模式时,执行步骤s313,否则继续以其他工作模式运行。
114.s313,检测扫风设备的扫风极限区域内是否存在目标主体。
115.若扫风设备工作于智能摇头模式,此时扫风设备还可以继续判断扫风设备是否完成摇头初始化,在扫风设备初始化过程中可以控制扫风设备以最大的扫风速率以检测扫风设备的极限扫风区域内是否存在目标主体,在提高目标主体的检测效率的同时缩短了开机初始化时间。当检测到扫风极限区域内存在目标主体时,执行步骤s314,否则执行步骤s316。
116.s314,获取目标主体的分布状态。
117.当扫风设备检测到扫风极限区域内存在目标主体时,可以对其检测到目标主体的个数和各个目标主体所处位置进行获取,以确定目标主体的分布状态,并根据目标主体的分布位置确定出扫风设备的扫风边界。
118.s315,基于目标主体的分布状态,确定扫风设备的扫风边界。详细说明参见上述实施例的相关描述,此处不再赘述。
119.s316,切换扫风设备的运行模式。
120.当扫风设备检测到扫风极限区域内不存在任何目标主体时,此时可以切换扫风设
备工作于其他模式,例如空气循环模式,并在该空气循环模式运行过程中继续检测目标主体。
121.s317,判断扫风设备以切换后的运行模式持续工作的预设时长内是否检测到扫风极限区域存在目标主体。
122.预设时长为扫风设备以切换后的运行模式持续运行的时长。预设时长可以根据经验值确定,例如15分钟、20分钟、25分钟以及30分钟等,此处对此不作具体限定。预设时长可以通过扫风设备内设置的计时装置确定,也可以通过运行模式的切换时间戳计算得到,当然还可以根据其他方式确定,此处对预设时长的获取模式不作具体限定。
123.当扫风设备切换运行模式后,其在切换运行模式后的预设时长内持续检测目标主体,以便确定扫风设备的扫风极限区域内是否存在目标主体。当预设时长内检测到扫风设备的扫风极限区域内存在目标主体时,执行步骤s318,否则执行步骤s319。
124.s318,执行获取目标主体的分布状态的步骤。
125.当预设时长内检测到扫风设备的扫风极限区域内存在目标主体时,返回执行获取目标主体的分布状态的步骤,详细说明参见上述实施例的相关描述,此处不再赘述。
126.s319,控制扫风设备进入待机状态。
127.当预设时长内未检测到扫风设备的扫风极限区域内存在目标主体时,表示扫风设备的扫风极限区域内并不存在目标主体,此时扫风设备无需执行扫风功能,可以控制扫风设备进入待机状态,以避免电能消耗。
128.s32,判断扫风边界中目标主体的分布状态是否发生变化。详细说明参见上述实施例对应步骤s12的相关描述,此处不再赘述。
129.s33,当目标主体的分布状态发生变化时,控制扫风设备进行目标主体检测,确定目标主体的当前分布状态。详细说明参见上述实施例对应步骤s13的相关描述,此处不再赘述。
130.s34,基于目标主体的当前分布状态,确定扫风设备的目标扫风边界。详细说明参见上述实施例对应步骤s14的相关描述,此处不再赘述。
131.本实施例提供的扫风设备的控制方法,通过在预设时长内持续检测目标主体以确定扫风设备的运行模式,从而实现了扫风设备的自适应运行,在避免多余电能消耗的同时提高了用户体验。
132.在本实施例中还提供了一种扫风设备的控制装置,该装置用于实现上述实施例及优选实施方式,已进行过说明的不再赘述。如以下所使用的术语“模块”可以是实现预定功能的软件和/或硬件的组合。尽管以下实施例所描述的装置较佳地以软件来实现,但是硬件或软件和硬件的组合的实现也是可能并被构想的。
133.本实施例提供一种扫风设备的控制装置,如图7所示,包括:
134.获取模块41,用于获取目标主体的分布状态,基于目标主体的分布状态,确定扫风设备的扫风边界。详细说明参见上述方法实施例对应的相关描述,此处不再赘述。
135.判断模块42,用于判断扫风边界中目标主体的分布状态是否发生变化。详细说明参见上述方法实施例对应的相关描述,此处不再赘述。
136.控制模块43,用于当目标主体的分布状态发生变化时,控制扫风设备进行目标主体检测,确定目标主体的当前分布状态。详细说明参见上述方法实施例对应的相关描述,此
处不再赘述。
137.确定模块,用于基于目标主体的当前分布状态,确定扫风设备的目标扫风边界。详细说明参见上述方法实施例对应的相关描述,此处不再赘述。
138.本实施例中的电风扇的控制装置是以功能单元的形式来呈现,这里的单元是指asic电路,执行一个或多个软件或固定程序的处理器和存储器,和/或其他可以提供上述功能的器件。
139.上述各模块的更进一步的功能描述与上述对应实施例相同,在此不再赘述。
140.本发明实施例还提供一种电风扇,具有图7所示的扫风设备的控制装置。
141.请参阅图8,图8是本发明可选实施例提供的一种电风扇的结构示意图,如图8所示,该电风扇可以包括:至少一个处理器501,例如cpu(central processing unit,中央处理器),至少一个通信接口503,存储器504,至少一个通信总线502。其中,通信总线502用于实现这些组件之间的连接通信。其中,通信接口503可以包括显示屏(display)、键盘(keyboard),可选通信接口503还可以包括标准的有线接口、无线接口。存储器504可以是高速ram存储器(random access memory,易挥发性随机存取存储器),也可以是非不稳定的存储器(non
‑
volatile memory),例如至少一个磁盘存储器。存储器504可选的还可以是至少一个位于远离前述处理器501的存储装置。其中处理器501可以结合图7所描述的装置,存储器504中存储应用程序,且处理器501调用存储器504中存储的程序代码,以用于执行上述任一方法步骤。
142.其中,通信总线502可以是外设部件互连标准(peripheral component interconnect,简称pci)总线或扩展工业标准结构(extended industry standard architecture,简称eisa)总线等。通信总线502可以分为地址总线、数据总线、控制总线等。为便于表示,图8中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
143.其中,存储器504可以包括易失性存储器(英文:volatile memory),例如随机存取存储器(英文:random
‑
access memory,缩写:ram);存储器也可以包括非易失性存储器(英文:non
‑
volatile memory),例如快闪存储器(英文:flash memory),硬盘(英文:hard disk drive,缩写:hdd)或固态硬盘(英文:solid
‑
state drive,缩写:ssd);存储器504还可以包括上述种类存储器的组合。
144.其中,处理器501可以是中央处理器(英文:central processing unit,缩写:cpu),网络处理器(英文:network processor,缩写:np)或者cpu和np的组合。
145.其中,处理器501还可以进一步包括硬件芯片。硬件芯片可以是专用集成电路(英文:application
‑
specific integrated circuit,缩写:asic),可编程逻辑器件(英文:programmable logic device,缩写:pld)或其组合。pld可以是复杂可编程逻辑器件(英文:complex programmable logic device,缩写:cpld),现场可编程逻辑门阵列(英文:field
‑
programmable gate array,缩写:fpga),通用阵列逻辑(英文:generic array logic,缩写:gal)或其任意组合。
146.可选地,存储器504还用于存储程序指令。处理器501可以调用程序指令,实现如本技术图1至图6实施例中所示的扫风设备的控制方法。
147.本发明实施例还提供了一种非暂态计算机存储介质,所述计算机存储介质存储有计算机可执行指令,该计算机可执行指令可执行上述任意方法实施例中的扫风设备的控制
方法的处理方法。其中,所述存储介质可为磁碟、光盘、只读存储记忆体(read
‑
only memory,rom)、随机存储记忆体(random access memory,ram)、快闪存储器(flash memory)、硬盘(hard disk drive,缩写:hdd)或固态硬盘(solid
‑
state drive,ssd)等;所述存储介质还可以包括上述种类的存储器的组合。
148.虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下做出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1