一种自行式破碎机液压系统的制作方法
1.本实用新型涉及破碎机技术领域,特别涉及一种自行式破碎机液压系统。
背景技术:
2.传统的破碎锤通常基于现有挖掘机,通过替换挖掘机的铲斗、借助挖掘机上预留的动力源进行破碎作业。采用这种方式的破碎锤往往存在破碎功率不足、破碎效率较低的问题,尤其是在挖掘机回转机构不工作时,用于回转部分的动力浪费较大,约占整个系统的30%。
3.综上所述,现有技术的系统损耗较大,破碎效果及破碎效率都有限。
技术实现要素:
4.本实用新型提出一种自行式破碎机液压系统,解决了现有技术中破碎锤与挖掘机结合所用液压系统的耗能较大、破碎效果不佳的问题。
5.本实用新型的技术方案是这样实现的:
6.一种自行式破碎机液压系统,包括破碎机本体和液压系统,所述液压系统包括油箱总成、液压泵、多路阀和油缸组件,所述油箱总成的输出端连接液压泵,液压泵的输出端连接多路阀,所述多路阀的各联阀和油缸组件连接,油缸组件连接到破碎机本体的不同部位以通过油缸组件驱动破碎机本体工作。
7.优选的,所述液压系统还包括远程控制组件,所述远程控制组件包括工控机显示器、5g收发器、gps移动站、激光雷达、嵌入式电脑、远程控制电脑和 gps基站,所述工控机显示器、5g收发器、gps移动站、激光雷达均与嵌入式电脑电连接,所述远程控制电脑与5g收发器通过5g信号通讯,所述的gps基站与gps移动站通过电台进行无线电通讯。
8.优选的,还包括回油散热器,所述回油散热器的一端与多路阀的回油口连接且其另一端与油箱总成连接。
9.优选的,所述破碎机本体包括连接的发动机、破碎机控制器、破碎机显示器、破碎锤、左操纵手柄、左踏板、右踏板、右操纵手柄、左行走马达减速机和右行走马达减速机,所述发动机、破碎机显示器、嵌入式电脑、左行走马达减速机、右行走马达减速机、多路阀、回油散热器、液压泵、左操纵手柄、左踏板、右踏板和右操纵手柄均与破碎机控制器电连接。
10.优选的,所述油缸组件包括小臂油缸、中臂油缸和大臂油缸,所述小臂油缸、中臂油缸和大臂油缸的旋转轴处均安装有编码器,所述编码器与破碎机控制器电连接。
11.优选的,所述多路阀包括大臂联、中臂联、小臂联、左行走马达减速机联、回油联、右行走马达减速机联、破碎锤联和备用联,其中,所述大臂联连接大臂油缸,所述中臂联连接中臂油缸,所述小臂联连接小臂油缸,所述左行走马达减速机联连接左行走马达减速机,所述回油联连接回油散热器,所述右行走马达减速机联连接右行走马达减速机,所述破碎锤联连接破碎锤,所述备用联备用。
12.优选的,所述液压泵为双变量开式液压泵,所述液压泵安装在发动机的输出轴上,
液压泵的一个输入口与油箱总成连接,液压泵的输出口分别连接多路阀的右行走马达减速机联和小臂联。
13.优选的,还包括与破碎机控制器连接的压力传感器,所述压力传感器安装在液压泵的输出口与右行走马达减速机联之间的管路和液压泵的输出口与小臂联之间的管路上。
14.优选的,还包括与嵌入式电脑连接的双目摄像头。
15.优选的,还包括安装大臂油缸上的防爆阀。
16.本实用新型的有益效果是:
17.(1)本实用新型根据破碎机作业工况需求,取消了传统挖掘机的回转功能,并将该动力源用于破碎锤,增加了破碎功率,改善了破碎性能,提高了工作效率、降低了能量损失。
18.(2)本实用新型得液压系统可依据用户的破碎工程需要,选择不同的破碎联油口尺寸,从而使破碎机动力传动系统更加合理,以满足不同的破碎功率,在降低劳动强度的同时,实现高效节能的目的。
19.(3)本实用新型适用于取消了传统的回转功能的破碎机,通过控制左右马达的差速实现转向,在满足破碎作业需求的同时,简化了机械结构,节约了制造成本。
20.(4)本实用新型可进行无人驾驶及远程控制作业,自动化程度高,节约了人力成本,便于集群控制和大规模作业。
21.(5)本实用新型可在恶劣的环境下工作,安全性好。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
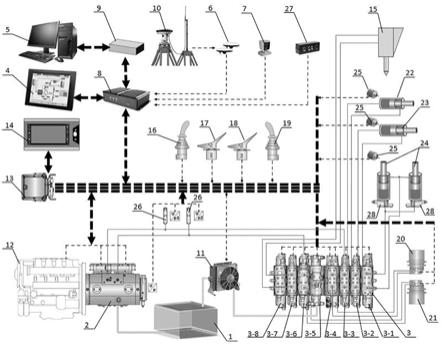
23.图1、本实用新型一种自行式破碎机液压系统的结构示意图;
24.附图标记说明:
25.1、油箱总成,2、液压泵;
26.3、多路阀,3-1、大臂联,3-2、中臂联,3-3、小臂联,3-4、左行走马达减速机联,3-5、回油联,3-6、右行走马达减速机联,3-7、破碎锤联,3-8、备用联;
27.4、工控机显示器,5、5g收发器,6、gps移动站,7、激光雷达,8、嵌入式电脑,9、远程控制电脑,10、gps基站,11、回油散热器,12、发动机, 13、破碎机控制器,14、破碎机显示器,15、破碎锤,16、左操纵手柄,17、左踏板,18、右踏板,19、右操纵手柄,20、左行走马达减速机,21、右行走马达减速机,22、小臂油缸,23、中臂油缸,24、大臂油缸,25、编码器,26、压力传感器,27、双目摄像头,28、防爆阀。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.如图1所示,一种自行式破碎机液压系统,包括破碎机本体和液压系统,液压系统包括油箱总成1、液压泵2、多路阀3和油缸组件,油箱总成1的输出端连接液压泵2,液压泵2的输出端连接多路阀3,多路阀3的各联阀和油缸组件连接,油缸组件连接到破碎机本体的不同部位以通过油缸组件驱动破碎机本体工作。
30.其中,液压系统还包括远程控制组件,远程控制组件包括工控机显示器4、 5g收发器5、gps移动站6、激光雷达7、嵌入式电脑8、远程控制电脑9和 gps基站10,工控机显示器4、5g收发器5、gps移动站6、激光雷达7均与嵌入式电脑8电连接,远程控制电脑9与5g收发器5通过5g信号通讯的gps 基站10与gps移动站6通过电台进行无线电通讯,还包括与嵌入式电脑8连接的双目摄像头27。
31.另外,还包括回油散热器11,回油散热器11的一端与多路阀3的回油口连接且其另一端与油箱总成1连接。
32.破碎机本体包括连接的发动机12、破碎机控制器13、破碎机显示器14、破碎锤15、左操纵手柄16、左踏板17、右踏板18、右操纵手柄19、左行走马达减速机20和右行走马达减速机21,发动机12、破碎机显示器14、嵌入式电脑 8、左行走马达减速机20、右行走马达减速机21、多路阀3、回油散热器11、液压泵2、左操纵手柄16、左踏板17、右踏板18和右操纵手柄19均与破碎机控制器13电连接。
33.油缸组件包括小臂油缸22、中臂油缸23和大臂油缸24,小臂油缸22、中臂油缸23和大臂油缸24的旋转轴处均安装有编码器25,编码器25与破碎机控制器13电连接。还包括安装大臂油缸24上的防爆阀28。
34.多路阀3包括大臂联3-1、中臂联3-2、小臂联3-3、左行走马达减速机联 3-4、回油联3-5、右行走马达减速机联3-6、破碎锤联3-7和备用联3-8,其中,大臂联3-1连接大臂油缸24,中臂联3-2连接中臂油缸23,小臂联3-3连接小臂油缸22,左行走马达减速机联3-4连接左行走马达减速机20,回油联3-5连接回油散热器11,右行走马达减速机联3-6连接右行走马达减速机21,破碎锤联3-7连接破碎锤15,备用联3-8备用。
35.其中,液压泵2为双变量开式液压泵2,液压泵2安装在发动机12的输出轴上,液压泵2的一个输入口与油箱总成1连接,液压泵2的输出口分别连接多路阀3的右行走马达减速机联3-6和小臂联3-3。
36.还包括与破碎机控制器13连接的压力传感器26,压力传感器26安装在液压泵2的输出口与右行走马达减速机联3-6之间的管路和液压泵2的输出口与小臂联3-3之间的管路上。
37.本实用新型的工作原理如下:
38.人工驾驶及破碎作业时,发动机12工作,驱动液压泵2旋转,液压泵2将来自油箱总成1的液压油加压,将压力油液输送至多路阀3。此时,前后推收左操纵手柄16,多路阀3的小臂联3-3动作,小臂油缸22伸出或缩回;按下左操纵手柄上的按钮,多路阀3的破碎锤联3-7动作,破碎锤15工作;前后推收右操纵手柄19,多路阀3的中臂联3-2动作,中臂油缸23伸出或缩回;左右扳动右操纵手柄19,多路阀3的大臂联3-1动作,大臂油缸24伸出或缩回;向前踩左踏板17,左行走马达减速机联3-4动作,左行走马达减速机20提速,破碎机右转;向后踩左踏板17,左行走马达减速机联3-4动作,左行走马达减速机20 减速,破碎机左转;向前踩右踏板18,右行走马达减速机联3-6动作,右行走马达减速机21提速,破碎机左转;向后踩右
踏板18,右行走马达减速机联3-6 动作,右行走马达减速机21减速,破碎机右转。同时操作左操纵手柄16、右操纵手柄19,可实现破碎、小臂、中臂、大臂的联动;同时踩左踏板17、右踏板 18,可实现破碎机的左转、右转和直行。工作后的回油经多路阀3至回油散热器11,冷却后再到油箱总成1。来自小臂油缸22、中臂油缸23、大臂油缸24 旋转轴处编码器25的角度信号,通过破碎机控制器13解算后,在破碎机显示器14上实时虚拟显示出小臂、中臂、大臂的位置,以供驾驶人员参考。
39.自动驾驶及破碎作业时,在远程控制电脑9上输入工作指令,5g收发器7 接收到指令后,将指令传输给嵌入式电脑8,同时,gps基站10、gps移动站 6将定位信息,以及激光雷达7将扫描探测到的空间信息和双目摄像头27的视觉信息一同发给嵌入式电脑8,嵌入式电脑8按照预先设定的程序,对各种信息进行综合处理与决策,规划出任务流程,将指令进一步发送给破碎机控制器13,破碎机控制器13控制发动机1、液压泵2、多路阀3、破碎锤15工作,完成破碎机行走、破碎锤15定位与破碎工作。小臂油缸22、中臂油缸23、大臂油缸 24旋转轴处编码器25的角度信号,左行走马达减速机20和右行走马达减速机 21的转速信号,系统的压力信号、gps移动站6的定位信息,激光雷达7的空间信息和双目摄像头27的视觉信息,都实时反馈给嵌入式电脑8,与任务指令进行比对,直至最终完成任务。
40.回油散热器11监控系统回油温度,当温度超过一定范围时,启动风扇对回油散热,当温度降低到某一值以下时,关闭风扇;工控机显示器4用于显示交互信息、作业任务规划、任务完成情况等。
41.本实用新型根据破碎机作业工况需求,取消了传统挖掘机的回转功能,并将该动力源用于破碎锤,增加了破碎功率,改善了破碎性能,提高了工作效率、降低了能量损失。
42.本实用新型可依据用户的破碎工程需要,选择不同的破碎联油口尺寸,从而使破碎机动力传动系统更加合理,以满足不同的破碎功率,在降低劳动强度的同时,实现高效节能的目的。
43.本实用新型由于取消了传统的回转功能,通过控制左右马达的差速实现转向,在满足破碎作业需求的同时,简化了机械结构,节约了制造成本。
44.本实用新型可进行无人驾驶及远程控制作业,自动化程度高,节约了人力成本,便于集群控制和大规模作业。
45.本实用新型可在恶劣的环境下工作,安全性好。
46.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1