气泵控制电路、气泵控制装置以及桌面机器人的制作方法
1.本技术涉及气泵技术领域,尤其涉及气泵控制电路、气泵控制装置以及桌面机器人。
背景技术:
2.气泵是充气产品的必备部件之一,气泵控制器用于供用户在需要时控制气泵吹气(正压)、吸气(负压),以为充气产品充气或者放气。
3.然而,现有气泵的吹气(正压)、吸气(负压)控制大都基于微控制单元(micro control unit,mcu)实现,存在软件开发、软件维护成本高等问题。
技术实现要素:
4.本技术的目的在于提供气泵控制电路、气泵控制装置以及桌面机器人,旨在解决现有气泵的吹气、吸气控制基于mcu实现所存在的软件开发、软件维护成本高等问题。
5.本技术实施例提供了一种气泵控制电路,包括:
6.按键模块,用于根据按键动作生成第一按键控制信号和第二按键控制信号;
7.触发器模块,与所述按键模块连接,用于根据所述第一按键控制信号生成吸气控制信号,根据所述第二按键控制信号生成吹气控制信号,其中,所述吸气控制信号和所述吹气控制信号中至多一个为触发信号;
8.自控模块,用于接收输入的第一控制信号和第二控制信号,用于根据所述第一控制信号生成吸气控制信号,根据所述第二控制信号生成吹气控制信号,其中,所述吸气控制信号和所述吹气控制信号中至多一个为触发信号;
9.开关模块,与所述触发器模块和所述自控模块连接,用于在所述吸气控制信号为触发信号时控制吸气电磁阀上电,在所述吹气控制信号为触发信号时控制吹气电磁阀上电;
10.电源切换模块,具有用于为所述触发器模块供电的第一供电端和用于为所述自控模块供电的第二供电端,且所述第一供电端和所述第二供电端择一上电。
11.在一个实施例中,所述触发器模块包括:第一d触发器、第二d触发器、第一上拉单元、第二上拉单元、第一下拉单元和第二下拉单元;
12.所述第一d触发器的第一输入端与所述第二d触发器的第二输入端共接,构成所述触发器模块的第一输入端,用于接收所述第一按键控制信号;
13.所述第二d触发器的第一输入端与所述第一d触发器的第二输入端共接,构成所述触发器模块的第二输入端,用于接收所述第二按键控制信号;
14.所述第一上拉单元连接在第一供电端和所述第一d触发器的第二输入端之间,用于在所述第一供电端上电后将所述第一d触发器的第二输入端的电平上拉;所述第一下拉单元连接在第二供电端和所述第一d触发器的第二输入端之间,用于在所述第二供电端上电后将所述第一d触发器的第二输入端的电平下拉;所述第二上拉单元连接在第一供电端
和所述第二d触发器的第二输入端之间,用于在所述第一供电端上电后将所述第二d触发器的第二输入端的电平上拉;所述第二下拉单元连接在第二供电端和所述第二d触发器的第二输入端之间,用于在所述第二供电端上电后将所述第二d触发器的第二输入端的电平下拉;
15.所述第一d触发器的第一输出端构成所述触发器模块的第一输出端,用于输出所述吸气控制信号;所述第二d触发器的第一输出端构成所述触发器模块的第二输出端,用于输出所述吹气控制信号;
16.所述第一d触发器的第二输出端与所述第一d触发器的第四输入端连接,所述第一d触发器的第三输入端与所述第一d触发器的电源端共接于所述第一供电端;
17.所述第二d触发器的第二输出端与所述第二d触发器的第四输入端连接,所述第二d触发器的第三输入端与所述第二d触发器的电源端共接于所述第一供电端。
18.在一个实施例中,所述按键模块包括:
19.第一按键单元,与所述触发器模块的第一输入端连接,用于根据所述按键动作生成所述第一按键控制信号;
20.第二按键单元,与所述触发器模块的第二输入端连接,用于根据所述按键动作生成所述第二按键控制信号。
21.在一个实施例中,所述第一按键单元包括:第一复位按键、第一电阻、第一电容;
22.所述第一复位按键的第一端接地,所述第一复位按键的第二端、所述第一电阻的第一端、所述第一电容的第一端共接于所述触发器模块的第一输入端,所述第一电容的第二端接地,所述第一电阻的第二端与供电端连接。
23.在一个实施例中,所述第二按键单元包括:第二复位按键、第二电阻、第二电容;
24.所述第二复位按键的第一端接地,所述第二复位按键的第二端、所述第二电阻的第一端、所述第二电容的第一端共接于所述触发器模块的第二输入端,所述第二电容的第二端接地,所述第二电阻的第二端与供电端连接。
25.在一个实施例中,所述自控模块包括:
26.第一隔离驱动器,电源端连接所述第二供电端,输入端用于接收所述第一控制信号,输出端用于输出所述吸气控制信号;
27.第二隔离驱动器,电源端连接所述第二供电端,输入端用于接收所述第二控制信号,输出端用于输出所述吹气控制信号。
28.在一个实施例中,所述开关模块包括:第一开关单元和第二开关单元;
29.所述第一开关单元的第一端与所述吸气电磁阀连接,所述第一开关单元的第二端接地,所述第一开关单元的控制端接收所述吸气控制信号,所述第二开关单元的第一端与所述吹气电磁阀连接,所述第二开关单元的第二端接地,所述第二开关单元的控制端接收所述吹气控制信号。
30.在一个实施例中,所述开关模块还包括:
31.第三开关单元和第四开关单元;
32.所述第三开关单元的第一端、所述第四开关单元的第一端共接于大气压电磁阀和/或气源气泵,所述第三开关单元的第二端接地,所述第四开关单元的第二端接地,所述第三开关单元的控制端接收所述吸气控制信号,所述第四开关单元的控制端接收所述吹气
控制信号。
33.在一个实施例中,所述第一开关单元、所述第二开关单元、所述第三开关单元和所述第四开关单元均为n型mos管。
34.本技术实施例第二方面提供了一种气泵控制装置,其特征在于,包括如上述任一项实施例所述的气泵控制电路。
35.本技术实施例第三方面提供了一种桌面机器人,包括:基座、驱动机构、机械臂、气管、机械臂末端、吸气电磁阀、吹气电磁阀以及如上述任一项实施例所述的气泵控制电路,所述气管沿所述机械臂设置,并与所述吸气电磁阀和所述吹气电磁阀连接,所述气泵控制电路设于所述驱动机构内,并与所述吸气电磁阀和所述吹气电磁阀连接,用于对所述吸气电磁阀和所述吹气电磁阀的上电状态进行控制。
36.本技术提供了气泵控制电路、气泵控制装置以及桌面机器人,气泵控制电路与吸气电磁阀和吹气电磁阀连接,气泵控制电路可以择一实施手动控制或自动控制;选择手动控制时,按键模块根据按键动作生成第一按键控制信号和第二按键控制信号,并由触发器模块根据第一按键控制信号和第二按键控制信号生成至多只有一个为触发信号的吸气控制信号和吹气控制信号;选择自动控制时,根据接入的第一控制信号和第二控制信号,生成至多只有一个为触发信号的吸气控制信号和吹气控制信号,开关模块在吸气控制信号为触发信号时控制吸气电磁阀上电,在吹气控制信号为触发信号时控制吹气电磁阀上电,从而避免了mcu在气泵控制电路中的使用,解决了mcu应用于气泵控制电路时存在的软件开发、软件维护成本高等问题。
附图说明
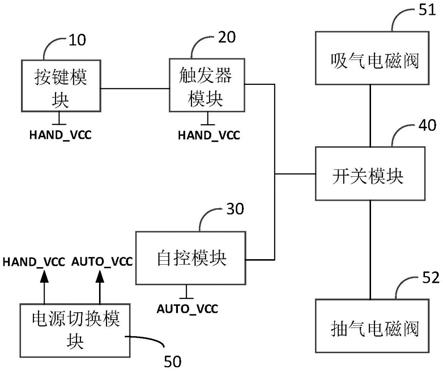
37.图1为本技术实施例提供的一种气泵控制电路的结构示意图;
38.图2为本技术实施例提供的另一气泵控制电路的结构示意图;
39.图3为本技术实施例提供的d触发器的逻辑示意图;
40.图4为本技术实施例提供的另一气泵控制电路的结构示意图。
具体实施方式
41.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
42.在本技术的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
43.现有气泵的吹气(正压)、吸气(负压)控制大都基于mcu实现,例如,由多个复位按键分别控制mcu对应的io接口,mcu检测到与吹气控制相关的io输入引脚出现低电平后,控制与吹气控制相关的io输出引脚输出高电平,驱动对应的吹气电磁阀上电,吹气电磁阀上电后气泵执行吹气动作,实现吹气功能,mcu检测到与吸气相关的io输入引脚出现低电平后,控制与吸气控制相关的io输出引脚输出高电平,驱动对应的吸气电磁阀上电,吸气电磁阀上电后气泵执行吸气动作,实现吸气功能。
44.然而,在基于mcu设计的气泵控制电路中,一方面,用户需要投入相应的软件开发、软件后期维护,增加了人力成本;另一方面,mcu的价格较高,增加了控制电路的物料成本。
45.为了解决上述存在的问题,本技术实施例提供了一种气泵控制电路,该气泵控制电路与吸气电磁阀51和吹气电磁阀52连接,参见图1所示,气泵控制电路包括:按键模块10、触发器模块20、自控模块30、开关模块40和电源切换模块50,按键模块10、触发器模块20构成手动控制组件,按键模块10根据按键动作生成第一按键控制信号和第二按键控制信号,并由触发器模块20根据第一按键控制信号和第二按键控制信号分别生成吸气控制信号和吹气控制信号。自控模块30构成自动控制组件,自控模块30用于接收输入的第一控制信号input1和第二控制信号input2,用于根据第一控制信号input1生成吸气控制信号,根据第二控制信号input2生成吹气控制信号。其中,在一次控制下,吸气控制信号和吹气控制信号中至多一个为触发信号(即有效);开关模块40在吸气控制信号为触发信号时控制吸气电磁阀51上电,在吹气控制信号为触发信号时控制吹气电磁阀52上电,从而避免了mcu在气泵控制电路中的使用,解决了mcu应用于气泵控制电路时存在的软件开发、软件维护成本高等问题。
46.另外,在一个时刻下,手动控制组件和自动控制组件只有一个能上电工作。具体是,电源切换模块50具有用于为触发器模块20供电的第一供电端hand_vcc和用于为自控模块30供电的第二供电端auto_vcc,且电源切换模块50根据外部操作使得第一供电端hand_vcc和第二供电端auto_vcc择一上电。在本实施例中,电源切换模块50包括单刀双掷开关sw3(请参阅图4),第一供电端hand_vcc和第二供电端auto_vcc通过一个单刀双掷开关sw3(请参阅图4)连接到电源,以实现电源只能为其中一个电源端供电。
47.在本实施例中,按键模块10可以根据不同的按键动作生成对应的按键控制信号,例如,按键动作可以包括用于控制吸气电磁阀51上电以使气泵实施吸气的第一按键动作和用于控制吹气电磁阀52上电以使气泵实施吹气的第二按键动作,在具体应用中,两个复位按键中任一复位按键执行按键动作,按键模块10均可以输出第一按键控制信号和第二按键控制信号,其区别在于,若对第一个复位按键执行第一按键动作,则第一按键控制信号为上升沿信号,第二按键控制信号为保持在高电平;若对第二个复位按键执行第二按键动作,则第二按键控制信号为上升沿信号,第一按键控制信号为保持在高电平;即对任意一个复位按键执行按键动作,按键模块10均会产生一个上升沿信号,以控制触发器模块20触发生成对应的吸气/吹气控制信号。
48.触发器模块20包括两个对应的触发器组成,分别根据接收的按键控制信号触发生成对应的吸气/吹气控制信号,由于触发器可以根据电平上升沿或者下降沿进行触发输出对应的电平,两个复位按键中任一复位按键执行按键动作。
49.在具体应用中,若开关模块40根据高电平导通,则该上述触发信号为高电平,若开关模块40根据低电平导通,则上述触发信号为低电平。例如,若开关模块40根据高电平的触发信号将对应的电磁阀接地,以控制该电磁阀上电,若触发器模块20生成的吸气控制信号为高电平,则开关模块40控制对应的吸气电磁阀51上电,实现气泵的吸气控制,若触发器模块20生成的吹气控制信号为高电平,则开关模块40控制对应的吹气电磁阀52上电,实现气泵的吸气控制。
50.在一个实施例中,参见图2和图4所示,触发器模块20包括:第一d触发器21、第二d
触发器22、第一上拉单元23、第二上拉单元24、第一下拉单元25和第二下拉单元26。
51.在本实施例中的d触发器中,结合图3所示的d触发器的逻辑功能表,d触发器包括第一输入端clk、第二输入端/clr、第三输入端/pre、第四输入端d、第一输出端q以及第二输出端/q,在d触发器的第二输入端/clr、第三输入端/pre、第四输入端d设置为高电平(h)时,d触发器的第一输入端clk检测到第一个上升沿(
↑
)时,第一输出端q输出高电平(h),第二输出端/q输出低电平(l),在d触发器的第二输入端/clr、第三输入端/pre设置为高电平(h),且第四输入端d设置为低电平(l)时,第一输入端clk检测到第二个上升沿(
↑
)时,第一输出端q输出低电平,第二输出端/q输出高电平。
52.在一个具体应用实施例中,结合图4所示,第一d触发器21的第一输入端clk1用于检测按键模块10发送的上升沿信号,第一d触发器21的第二输入端/clr1通过第一上拉单元23与第一供电端hand_vcc连接,以确保第一d触发器21的第一输出端q1在上电初始时刻默认输出低电平,第一d触发器21的第三输入端/pre1与电源端vcc共接于第一供电端hand_vcc,其电平设置为高电平。
53.第二d触发器22的第一输入端clk2用于检测按键模块10发送的上升沿信号,第二d触发器22的第二输入端/clr2通过第二上拉单元24与第一供电端hand_vcc连接,以确保第二d触发器22的第一输出端q2在上电初始时刻默认输出低电平,第二d触发器22的第三输入端/pre2与电源端vcc共接于第一供电端hand_vcc,其电平设置为高电平。
54.第一d触发器21的第一输入端clk1检测到第一个上升沿信号时,其第一输出端q1输出的吸气控制信号为高电平,此时开关模块40控制吸气电磁阀51上电,气泵执行吸气动作。第一d触发器21的第一输入端clk1检测到第二个上升沿信号时,其第一输出端q1输出的吸气控制信号为低电平,此时开关模块40控制吸气电磁阀51掉电,气泵停止执行吸气动作。
55.第二d触发器22的第一输入端clk2检测到第一个上升沿信号时,其第一输出端q2输出的吹气控制信号为高电平,此时开关模块40控制吹气电磁阀52上电,气泵执行吹气动作。第二d触发器22的第一输入端clk2检测到第二个上升沿信号时,其第一输出端q2输出的吹气控制信号为低电平,此时开关模块40控制吹气电磁阀52掉电,气泵停止执行吹气动作。
56.在本实施例中,参见图4所示,第一d触发器21的第一输入端clk1与第二d触发器22的第二输入端/clr2共接,构成触发器模块20的第一输入端,用于接收第一按键控制信号。
57.第二d触发器22的第一输入端clk2与第一d触发器21的第二输入端/clr1共接,构成触发器模块20的第二输入端,用于接收第二按键控制信号。
58.第一上拉单元23连接在第一供电端hand_vcc和第一d触发器21的第二输入端/clr1之间,用于在手动控制时,第一供电端hand_vcc上电后将第一d触发器21的第二输入端/clr1的电平上拉,以确保第一d触发器21的第一输出端q1默认输出低电平;第二上拉单元24连接在第一供电端hand_vcc和第二d触发器22的第二输入端/clr2之间,用于在手动控制时,第一供电端hand_vcc上电后将第二d触发器22的第二输入端/clr2的电平上拉,以确保第二d触发器22的第一输出端q2默认输出低电平。
59.通过将第一d触发器21的第一输入端clk1与第二d触发器22的第二输入端/clr2共接,在第一按键控制信号为上升沿信号时,将第二d触发器22的第二输入端/clr2的电平设置为低电平,第二d触发器22的第一输出端q2保持低电平,从而避免第一d触发器21的第一输出端q1和第二d触发器22的第一输出端q2同时输出高电平的信号。
60.通过将第二d触发器22的第一输入端clk2与第一d触发器21的第二输入端/clr1共接,可以在第二按键控制信号为上升沿信号时,将第一d触发器21的第二输入端/clr1的电平设置为低电平,第一d触发器21的第一输出端q1输出低电平,从而避免第一d触发器21的第一输出端q1和第二d触发器22的第一输出端q2同时输出高电平的信号。
61.第一d触发器21的第一输出端q1构成触发器模块20的第一输出端,用于输出吸气控制信号。
62.第二d触发器22的第一输出端构成触发器模块20的第二输出端,用于输出吹气控制信号。
63.具体的,第一上拉单元23包括第二电阻r2、第二电容c2,第一d触发器21的第二输入端/clr1、第二电阻r2的第一端、第二电容c2的第一端共接,第二电容c2的第二端接地,第二电阻r2的第二端与第一供电端hand_vcc连接。第二上拉单元24包括第六电阻r6、第四电容c4,第二d触发器22的第二输入端/clr2、第六电阻r6的第一端、第四电容c4的第一端共接,第四电容c4的第二端接地,第六电阻r6的第二端与第一供电端hand_vcc连接。
64.本实施例中,为避免自动控制过程中,手动控制组件被误触发,触发器模块20还设置第一下拉单元25和第二下拉单元26。
65.第一下拉单元25连接在第二供电端auto_vcc和第一d触发器21的第二输入端/clr1之间,第二下拉单元26连接在第二供电端auto_vcc和第二d触发器22的第二输入端/clr2之间,第一下拉单元25用于在自动控制时,第二供电端auto_vcc上电后将第一d触发器21的第二输入端/clr1的电平下拉;第二下拉单元26用于在自动控制时,第二供电端auto_vcc上电后将第二d触发器22的第二输入端/clr2的电平下拉,使得第一d触发器21的第一输出端q1和第二d触发器22的第一输出端q2保持输出低电平的信号,手动控制组件在自动控制时失效,从而避免系统逻辑混乱,提高可靠性。
66.参见图4所示,第一d触发器21的第二输出端/q1与第一d触发器21的第四输入端d1连接,第一d触发器21的第三输入端/pre1与第一d触发器21的电源端vcc1共接于第一供电端hand_vcc。
67.第二d触发器22的第二输出端/q2与第二d触发器22的第四输入端d2连接,第二d触发器22的第三输入端/pre2与第二d触发器22的电源端vcc2共接于第一供电端hand_vcc。
68.第一下拉单元25包括第三电阻r3、第四电阻r4和npn三极管t5,第三电阻r3连接在第一d触发器21的第二输入端/clr1和npn三极管t5的集电极之间,第四电阻r4连接在第二供电端auto_vcc和npn三极管t5的基极之间,npn三极管t5的发射极接地,在第二供电端auto_vcc上电后将npn三极管t5导通将第一d触发器21的第二输入端/clr1的电平下拉到地,使得第一d触发器21的第一输出端q1保持输出低电平的信号。
69.第二下拉单元26包括第七电阻r7、第八电阻r8和npn三极管t6,第七电阻r7连接在第二d触发器22的第二输入端/clr2和npn三极管t6的集电极之间,第八电阻r8连接在第二供电端auto_vcc和npn三极管t6的基极之间,npn三极管t6的发射极接地,在第二供电端auto_vcc上电后将npn三极管t6导通将第二d触发器22的第二输入端/clr2的电平下拉到地,使得第二d触发器22的第一输出端q2保持输出低电平的信号。
70.在本实施例中,第一d触发器21的第一输出端q1与其第二输出端/q1的输出电平相反,第二d触发器22的第一输出端q2与其第二输出端/q2的输出电平相反。
71.在本实施例中,通过在第一d触发器21的第二输入端/clr1和第二d触发器22的第二输入端/clr2接入上拉电路,可以确保系统手动控制上电后,按键模块10被操作前,第一d触发器21的第一输出端q1和第二d触发器22的第一输出端q2默认输出为低电平,避免气泵被误启动。
72.在一个具体应用实施例中,上拉电路包括的rc电路其rc参数可以根据需要确定,例如,根据电容充电时间公式vt=vu*[1
–
exp(-t/rc)],当vt=0.99vu时,t=200~300ms最佳,其中,vu为第一供电端hand_vcc的电压,r为rc电路中的电阻阻值,c为rc电路中的电容容值。
[0073]
另外,通过在第一d触发器21的第二输入端/clr1和第二d触发器22的第二输入端/clr2接入下拉电路,可以确保系统自动控制上电后,即使按键模块10被操作,第一d触发器21的第一输出端q1和第二d触发器22的第一输出端q2都保持输出为低电平,避免气泵被误启动。
[0074]
在一个实施例中,参见图2和图4所示,按键模块10包括第一按键单元11和第二按键单元12。
[0075]
第一按键单元11与触发器模块20的第一输入端连接,用于根据按键动作生成第一按键控制信号;第二按键单元12与触发器模块20的第二输入端连接,用于根据按键动作生成第二按键控制信号。
[0076]
在本实施例中,第一按键单元11和第二按键单元12均可以根据按键动作生成上升沿信号。
[0077]
在一个实施例中,参见图4所示,第一按键单元11包括:第一复位按键sw1、第一电阻r1、第一电容c1;第一复位按键sw1的第一端接地,第一复位按键sw1的第二端、第一电阻r1的第一端、第一电容c1的第一端共接于触发器模块20的第一输入端,第一电容c1的第二端接地,第一电阻r1的第二端与第一供电端hand_vcc连接。
[0078]
在一个实施例中,参见图4所示,第二按键单元12包括:第二复位按键sw2、第二电阻r2、第二电容c2;第二复位按键sw2的第一端接地,第二复位按键sw2的第二端、第二电阻r2的第一端、第二电容c2的第一端共接于触发器模块20的第二输入端,第二电容c2的第二端接地,第二电阻r2的第二端与第一供电端hand_vcc连接。
[0079]
参见图4所示,在一个实施例中,自控模块30包括第一隔离驱动器t7、第二隔离驱动器t8。
[0080]
第一隔离驱动器t7的电源端连接第二供电端auto_vcc,第一隔离驱动器t7的输入端用于接收第一控制信号input1,第一隔离驱动器t7的输出端用于输出吸气控制信号;第二隔离驱动器t8的电源端连接第二供电端auto_vcc,第二隔离驱动器t8的输入端用于接收第二控制信号input2,第二隔离驱动器t8的输出端用于输出吹气控制信号。采用隔离器件驱动,可以避免两侧的电路相互干扰。本例中,隔离驱动器是光电耦合器,隔离驱动器的输入端是光电耦合器的发光源的正极,电源端是受光器的输入端(比如光敏三极管的集电极),输出端是受光器的输出端(比如光敏三极管的发射极)。另外,第一控制信号input1、吸气控制信号、第二控制信号input2、吹气控制信号为高电平信号。
[0081]
在一个实施例中,开关模块40包括:第一开关单元41和第二开关单元42。
[0082]
第一开关单元41的第一端与吸气电磁阀51连接,第一开关单元41的第二端接地,
第一开关单元41的控制端与触发器模块20的第一输出端连接,第二开关单元42的第一端与吹气电磁阀52连接,第二开关单元42的第二端接地,第二开关单元42的控制端与触发器模块20的第二输出端连接。
[0083]
在一个实施例中,第一开关单元41和第二开关单元42均为n型mos管。
[0084]
参见图4所示,第一开关单元41包括第一开关管t1,第一开关管t1的第一端与吸气电磁阀51连接,第一开关管t1的第二端接地,第一开关管t1的控制端与第一d触发器21连接。
[0085]
第一开关管t1可以为n型mos管,吸气电磁阀51与系统电源+24v连接,若吸气控制信号为高电平,则第一开关管t1导通,吸气电磁阀51上电,气泵执行吸气动作。
[0086]
参见图4所示,第二开关单元42包括第二开关管t3,第二开关管t3的第一端与吹气电磁阀52连接,第二开关管t3的第二端接地,第二开关管t3的控制端与第二d触发器22连接。
[0087]
第二开关管t3可以为n型mos管,吹气电磁阀52与系统电源+24v连接,若吹气控制信号为高电平,则第二开关管t3导通,吹气电磁阀52上电,气泵执行吹气动作。
[0088]
在一个实施例中,开关模块40还包括:第三开关单元43和第四开关单元44。
[0089]
第三开关单元43的第一端、第四开关单元44的第一端共接于大气压电磁阀54和/或气源气泵54,第三开关单元43的第二端接地,第四开关单元44的第二端接地,第三开关单元43的控制端与触发器模块20的第一输出端连接,第四开关单元44的控制端与触发器模块20的第二输出端连接。
[0090]
在本实施例中,通过第三开关单元43和第四开关单元44可以同时控制大气压电磁阀53和/或气源气泵54的启动,避免气泵在无操作时大气压电磁阀53和/或气源气泵54保持工作导致能耗损失。
[0091]
在第一复位按键sw1被按下后复位瞬间,第一d触发器21的第一输出端q1输出高电平的吸气控制信号,第一开关单元41和第三开关单元43导通,吸气电磁阀51、大气压电磁阀53以及气源气泵54均处于工作状态,在第一复位按键sw1再次被按下后复位瞬间,第一d触发器21的第一输入端clk1检测到第二个上升沿,第一d触发器21的第一输出端q1输出低电平的吸气控制信号,第一开关单元41和第三开关单元43管子关闭,吸气电磁阀51、大气压电磁阀53、气源气泵54均停止工作。
[0092]
在第二复位按键sw2被按下后复位瞬间,第二d触发器22的第一输出端q2输出高电平的吹气控制信号,第二开关单元42和第四开关单元44导通,吹气电磁阀、大气压电磁阀53以及气源气泵54均处于工作状态,在第二复位按键sw2再次被按下后复位瞬间,第二d触发器22的第一输入端clk2检测到第二个上升沿,第二d触发器22的第一输出端q2输出低电平的吹气控制信号,第二开关单元42和第四开关单元44管子关闭,吹气电磁阀、大气压电磁阀53、气源气泵54均停止工作。
[0093]
在一个实施例中,第三开关单元43和第四开关单元44可以为n型mos管。
[0094]
参见图4所示,第三开关单元43包括第三开关管t2,第三开关管t2的第一端与大气压电磁阀53和气源气泵54连接,第三开关管t2的第二端接地,第三开关管t2的控制端与第一d触发器21连接。
[0095]
第三开关管t2可以为n型mos管,第三开关管t2和第一开关管t1的控制端均与第一
d触发器21连接,大气压电磁阀53和气源气泵54与系统电源+24v连接,当吸气控制信号为高电平时,则第一开关管t1、第三开关管t2同时导通,吸气电磁阀51、大气压电磁阀53、气源气泵54同时上电,气泵执行吸气动作。
[0096]
参见图4所示,第四开关单元44包括第四开关管t4,第四开关管t4的第一端与大气压电磁阀53和气源气泵54连接,第四开关管t4的第二端接地,第四开关管t4的控制端与第二d触发器22连接。
[0097]
第四开关管t4可以为n型mos管,第四开关管t4和第二开关管t3的控制端均与第二d触发器22连接,大气压电磁阀53和气源气泵54与系统电源+24v连接,当吹气控制信号为高电平时,则第二开关管t3、第四开关管t4导通,吸气电磁阀51、大气压电磁阀53、气源气泵54同时上电,气泵执行吹动作。
[0098]
本技术实施例还提供了一种气泵控制装置,包括如上述任一项实施例的气泵控制电路。
[0099]
本技术实施例还提供了一种桌面机器人,包括:基座、驱动机构、机械臂、气管、机械臂末端、吸气电磁阀51、吹气电磁阀52以及如上述任一项实施例所述的气泵控制电路,气管沿机械臂设置,并与吸气电磁阀51和吹气电磁阀52连接,气泵控制电路设于驱动机构内,并与吸气电磁阀51和吹气电磁阀52连接,用于对吸气电磁阀51和吹气电磁阀52的上电状态进行控制。
[0100]
以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1