一种电动燃油泵控制器系统的制作方法
1.本实用新型属于控制器技术领域,具体涉及一种电动燃油泵控制器系统。
背景技术:
2.电动燃油泵是指连续不断地把燃油从油箱吸出,给燃油系统提供规定压力和流量的燃油的装置,电动燃油泵的性能的好坏将直接影响发动机的工作性能,而电动燃油泵控制器设计的好坏同样会影响电动燃油泵的工作性能。
3.现有技术中,电动燃油泵控制器主要包括有刷控制器和无刷控制器。其中,有刷控制器配合有刷电机工作,存在损耗大、散热慢、干扰大、噪音大以及寿命短的缺陷。无刷控制器配合无刷电机工作,又分为有感控制技术和无感控制技术,其中,有感控制技术带有霍尔传感器,成本较高;无感控制技术利用反电动势获取电机转子的位置,无需设置传感器,然而,现有的无感控制器仍存在控制器成本高、器件管脚较多导致线路复杂、尺寸较大以及工作电压范围低等缺陷。
技术实现要素:
4.本实用新型的目的是提供一种电动燃油泵控制器系统,用于解决现有技术中存在的至少一个问题
5.为了实现上述目的,本实用新型采用以下技术方案:
6.本实用新型提供一种电动燃油泵控制器系统,包括输入接口,所述输入接口用于连接控制器电源,所述输入接口的输出端与接口电路的输入端连接,所述接口电路的输出端与滤波电路的输入端连接,所述滤波电路的输出端分别与mcu微处理器的输入端、电机控制器的输入端以及功率桥的输入端连接;
7.所述mcu微处理器的输出端的脉冲信号线、双向数据线以及时钟线分别与所述电机控制器的控制脚连接,所述电机控制器的输出端与所述mcu微处理器的输入端连接,所述电机控制器的控制端gxa,gxb和gxc分别与所述功率桥的三相连接,所述功率桥的输出端分别与无刷电机的三相线连接。
8.在一种可能的设计中,所述系统还包括高边开关电路,所述高边开关电路的输入端与所述滤波电路的输出端连接,所述高边开关电路的输入控制端与所述mcu微处理器的控制脚连接,所述高边开关电路的输出端分别与所述电机控制器的输入端和所述功率桥的输入端连接。
9.在一种可能的设计中,所述系统还包括mcu电源电路,所述mcu电源电路的输入端与所述滤波电路的输出端连接,所述mcu电源电路的输出端与所述电机控制器的输出端并联后与所述mcu微处理器的输入端连接。
10.在一种可能的设计中,所述mcu微处理器设有gpio通信接口,所述gpio通信接口与所述外部通信接口连接,用于实现所述mcu微处理器与所述上层电子控制单元的通信。
11.在一种可能的设计中,所述mcu微处理器采用pic12lf1822芯片。
12.在一种可能的设计中,所述电机控制器采用allegroa5932芯片。
13.在一种可能的设计中,所述控制器系统安装在第一pcb板上,所述第一pcb板设置在电动燃油泵的泵体内。
14.在一种可能的设计中,所述控制器系统安装在第二pcb板上,所述第二pcb板设置在电动燃油泵的泵体外,并位于电动燃油泵的壳体内。
15.有益效果:本实用新型中的电动燃油泵控制器系统,包括接口电路、滤波电路、mcu电源电路、高边开关电源电路、mcu微处理器、电机控制器和功率桥,通过各个电路之间电路结构的优化设计,使得该控制器系统可以兼容车辆的12v系统和24v系统,兼容性强;且控制器的安装位置既可以内置于电动燃油泵的泵体中,也可以设置在电动燃油泵的泵体外,并位于电动燃油泵的壳体内,安装位置的灵活性较高。此外,本技术的控制器系统集成度高、成本低、效率高且寿命长,进而使得电动燃油泵的压力/流量等稳定性高、性能及耐久可靠性高以及流量/转速控制精度高。
附图说明
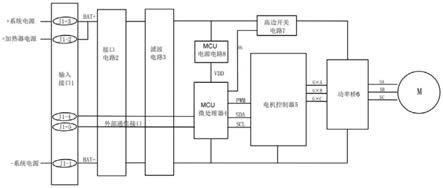
16.图1为本实施例中的电动燃油泵控制器系统的结构框图;
17.图2为本实施例中的内置式电动燃油泵控制器系统的立体结构图;
18.图3为本实施例中的内置式电动燃油泵控制器系统的俯视图;
19.图4为本实施例中的内置式电动燃油泵控制器系统的仰视图;
20.图5为本实施例中的外置式电动燃油泵控制器系统的立体结构图;
21.图6为本实施例中的外置式电动燃油泵控制器系统的俯视图;
22.图7为本实施例中的外置式电动燃油泵控制器系统的仰视图;
23.图8为本实施例中的接口电路和滤波电路的电路结构示意图;
24.图9为本实施例中的mcu微处理器的电路结构示意图;
25.图10为本实施例中的电机控制器的电路结构示意图;
26.图11为本实例中的功率桥的电路结构示意图。
27.其中,1-输入接口;2-接口电路;3-滤波电路;4-mcu微处理器;5-电机控制器;6-功率桥;7-高边开关电路;8-mcu电源电路。
具体实施方式
28.为使本说明书实施例的目的、技术方案和优点更加清楚,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.实施例
30.如图1-11所示,本实施例提供一种电动燃油泵控制器系统,包括输入接口1,所述输入接口1用于连接控制器电源,所述输入接口1的输出端与接口电路2的输入端连接,所述接口电路2的输出端与滤波电路3的输入端连接,所述滤波电路3的输出端分别与mcu微处理器4的输入端、电机控制器5的输入端以及功率桥6的输入端连接;所述mcu微处理器4的输出
端的脉冲信号线pwm、双向数据线sda以及时钟线scl分别与所述电机控制器5的控制脚连接,所述电机控制器5的输出端与所述mcu微处理器4的输入端连接,所述电机控制器5的控制端gxa,gxb和gxc分别与所述功率桥6的三相连接,所述功率桥6的输出端分别与无刷电机的三相线连接。
31.其中,需要说明的是,所述输入接口1是整个控制器系统的输入接口1,如图1所示,包括j1-1、j1-2和j1-3,其中,j1-1和j1-3分别是控制器电源的正负极输入脚,j1-1的最高工作电压范围为6-48v;j1-2脚为控制器电源的输出管脚,其中,j1-2脚是j1-3脚的电源分支,经内部pcb板走线直接转为输出,用于提供滤清器总成中的加热器供电。
32.其中,优选的,所述输入接口1包括电源接口和外部通信接口,所述电源接口用于连接控制器电源,所述外部通信接口用于与上层电子控制单元进行通信。例如图1中的j1-4脚和j1-5脚是外部通信接口,用于实现与上层电子控制单元进行交互。
33.其中,优选的,所述接口电路2主要包括双向tvs(transient voltage suppressor,瞬态二极管)、陶瓷电容和防反二极管,其中,双向tvs用于满足车辆负载p5a试验标准,防反二极管用于对电源反接进行保护,从而实现emc(electro magnetic compatibility,电磁兼容性)的防护。
34.其中,优选的,所述滤波电路3主要包括共模电感、陶瓷电容和固态电容,用于实现控制器电源的稳定以及电磁兼容性的防护,进而增加电路的可靠性。
35.其中,优选的,所述mcu微处理器4采用pic12lf1822芯片,还包括外围的阻容件,例如rc滤波组件,用于吸收开关产生的振铃尖峰,此外,所述mcu微处理器4还用于实现定时控制,转速控制和i2c通信。因此,优选的,所述mcu微处理器4设有gpio通信接口,所述gpio通信接口与所述外部通信接口连接,用于实现所述mcu微处理器4与所述上层电子控制单元的通信。
36.其中,优选的,所述电机控制器5包括allegroa5932芯片,还包括外围的阻容件,用于实现对电机的闭环控制、参数调整、过压、过流、过温以及故障侦测等功能。
37.其中,优选的,所述功率桥6包括3个双封装的nmos(n-metal-oxide-semiconductor。意思为n型金属-氧化物-半导体)管,用于提高pcb线路板的设计密度,从而降低成本,使得设备更加小型化。
38.在一种可能的设计中,所述系统还包括高边开关电路7,所述高边开关电路7的输入端与所述滤波电路3的输出端连接,所述高边开关电路7的输入控制端与所述mcu微处理器4的控制脚连接,所述高边开关电路7的输出端分别与所述电机控制器5的输入端和所述功率桥6的输入端连接。
39.其中,需要说明的是,所述高边开关电路7用于控制所述电机控制器5和所述功率桥6的电源,在电动燃油泵停止时断开供电,从而进入掉电模式,进而在降低功耗的同时起到隔离保护器件的目的。
40.在一种可能的设计中,所述系统还包括mcu电源电路8,所述mcu电源电路8的输入端与所述滤波电路3的输出端连接,所述mcu电源电路8的输出端与所述电机控制器5的输出端并联后与所述mcu微处理器4的输入端连接。
41.其中,需要说明的是,所述mcu电源电路8用于为所述mcu微处理器4提供合适的电源,当然,可以理解的是,当本实施例中未设置mcu电源电路8时,所述mcu微处理器4也可由
所述电机控制器5提供2.8v的电源实现供电。
42.在一种可能的设计中,所述控制器系统安装在第一pcb板上,所述第一pcb板设置在电动燃油泵的泵体内,此时所述控制器系统可与无刷电机的pin脚连接。
43.在一种可能的设计中,所述控制器系统安装在第二pcb板上,所述第二pcb板设置在电动燃油泵的泵体外,并位于电动燃油泵的壳体内,此时所述控制器系统可与油泵连接器连接或者采用用户指定的方式连接。
44.基于上述公开的内容,本实施例中的控制器系统具体的工作原理如下:
45.首先,由于无刷电机主要由转子和定子组成,转子带有永磁体,定子带有三相线圈绕组。其中,三相线圈绕组分别由电子开关控制,电子开关使用6颗mos管组成桥式电路,按照规律切换三相线圈接通电流,就会形成旋转磁场,从而拉动转子旋转。其中,6颗mos管组成的桥式电路,按照6步法按照ab,ac,bc,ba,ca,cb的顺序两两导通。那么,在什么时间导通哪一对mos管,需要对转子的位置进行检测。
46.其次,对于转子位置的检测,主要分为传感器和无传感器两种方式。其中,有传感器的方式是以霍尔传感器为主,将3颗霍尔传感器按角度安装在pcb板上,转子上安装有永磁体,每当转子磁极经过霍尔传感器,霍尔传感器便会输出高低电平信号,根据三个霍尔信号的组合,就能判断出转子的位置。无传感器的方式是利用电机的反电动势检测转子位置,因为每步导通总有一个相位没有驱动,通过检测该相上的线圈电压,可以重建该相的反电动势波形,通过类过零检测电路计时,可以对电机的每相进行此操作,从而找到换向时间,而不需要位置传感器,
47.基于上述,本技术中的控制器系统基于车用三相直流无刷电机设计,通过mcu微处理器4(pic12lf1822芯片)+电机控制器5(allegroa5932芯片)实现无传感器正弦控制。具体的,mcu微处理器4负责定时功能和转速控制,a5932负责电机控制逻辑,可满足用户宽电压下的性能要求;同时设置外部通信接口,可实现上层电子控制单元的通信控制,例如转速、诊断以及故障反馈等。其中,pic12lf1822单片机的参数为:工作电压范围1.8v-3.6v、8位、soic-8封装,管脚少复用的功能多,满足控制器系统需要。由于是低压芯片,供电可以通过a5932提供,从而减少mcu供电电路的设置。其中,allegro a5932芯片是专用三相无传感器bldc驱动器,集成正弦信号驱动功能,自带无传感器算法获得电机位置,无需外部霍尔传感器,其工作电压范围为5v至50v,器件内的eeprom可以存储用户调试好的电机参数,参数的调整通过pc使用gui应用程序就可以完成,同时片内集成各种保护功能。
48.此外,本实施例中的控制器系统实现定时功能的具体原理如下:
49.其中,定时功能的目的是按照预设的时间控制电动燃油泵的停止,主要通过以下两种方式实现:
50.1.通过物理断电的方式实现,包括:控制器系统上电后,将mcu微处理器4初始化配置,启动定时程序,mcu微处理器4的控制脚置ra4高打开高边开关,通过ra5输出启动命令90%占空比的pwm,电机控制器5根据占空比计算转化为转速需求命令,功率桥6按照固定的开关频率输出调制后的电压到电机三相线圈;定时结束后,mcu微处理器4的控制脚ra4脚置低,高边开关关闭,断开电机的供电,等待下次上电后重新触发工作。
51.2.通过发送停止命令的方式实现:控制器系统上电后,将mcu微处理器4初始化配置,启动定时程序,mcu微处理器4的控制脚通过ra5输出启动命令90%占空比的pwm,电机控
制器5根据占空比计算转化为转速需求命令,功率桥6按照固定的开关频率输出调制后的电压到电机三相线圈;定时结束后,mcu控制脚ra5输出停止命令10%占空比,等待下次上电后重新触发工作。
52.基于上述公开的内容,本实施例中的电动燃油泵控制器系统,包括接口电路2、滤波电路3、mcu电源电路8、高边开关电源电路、mcu微处理器4、电机控制器5和功率桥6,通过各个电路之间电路结构的优化设计,使得该控制器系统可以兼容车辆的12v系统和24v系统,兼容性强;且控制器的安装位置既可以内置于电动燃油泵的泵体中,也可以设置在电动燃油泵的泵体外,并位于电动燃油泵的壳体内,安装位置的灵活性较高。此外,本技术的控制器系统集成度高、成本低、效率高且寿命长,进而使得电动燃油泵的压力/流量等稳定性高、性能及耐久可靠性高以及流量/转速控制精度高。
53.应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1