一种深海采矿无轴输送泵的多源驱动分布式调控系统
1.本发明涉及无轴泵控制系统技术领域,特别是涉及一种深海采矿无轴输送泵的多源驱动分布式调控系统。
背景技术:
2.无轴泵将电机与泵水力级设计集成为一体,提高了泵的结构紧凑性。多级泵内各水力级的模块化设计,使得泵内各水力级的分布式调控成为可能,有望显著提高泵的运行可靠性和效率。深海扬矿输送矿石颗粒路径长,颗粒级配复杂,混输泵容易出现堵塞的问题,使得采矿输送的效率严重降低,后续维修及安全成本过高。根据实时获得的混输泵内各水力级电机的负载和扭矩信息,以及颗粒浆料输送状况,合理的无轴泵运行控制技术可以准确调控各水力级叶轮转速,及时应对和化解泵内颗粒聚集,避免颗粒因聚集而发生堵塞,且使无轴泵总体扭矩达到平衡。目前,无轴泵多采用无刷电机,针对固液混输无轴泵运行中无刷电机的控制问题,相关学者并未提出具体的控制技术及方法,为此我们提出一种深海采矿无轴输送泵的多源驱动分布式调控系统。
技术实现要素:
3.针对上述问题,本发明提供了一种深海采矿无轴输送泵的多源驱动分布式调控系统,根据各级过流部件的负载导致的扭矩变化和固液两相流动特性,各水力级可独立调整转速,及时应对和化解泵内颗粒聚集,避免颗粒因聚集而发生堵塞;同时可有效避免整个无轴泵因扭矩不平衡而导致振动。
4.本发明的技术方案是:一种深海采矿无轴输送泵的多源驱动分布式调控系统,包括调控系统,所述调控系统包括无轴泵及固定连接的变频电机、本地控制器、水面控制器、与控制器相连的通讯装置、采集模块和执行元件;
5.所述无轴泵采用模块化的设计,各个水力级的驱动电机相互独立,水力级数量为偶数个,相邻水力级叶轮旋转方向相反,以助力无轴泵整体扭矩趋于平衡;
6.所述无轴泵的控制系统包括采矿船上的主控制器和位于无轴泵上的本地控制模块,所述本地控制器模块包括一个工作控制器和一个备用控制器,所述工作控制器和所述备用控制器之间并通连接且通过can总线与所述主控制器之间实现通讯,所述主控制器用于实时检测控制所述工作控制器和所述备用控制器之间的切换,以保障所述无轴泵的通讯;
7.所述控制器通过安装在各水力级上的采集模块采集各水力级泵体和电机的运行信息,所述采集模块分为泵体内部采集子模块和电机内部采集子模块,所述泵体内部采集子模块包括颗粒浓度传感器、压差传感器和流量传感器,所述泵体内部采集子模块用于监测矿石颗粒浓度、水力级扬程和流量,所述电机内部采集子模块包括位置传感器和扭矩传感器,所述电机内部采集子模块用于监测电机转子的位置和扭矩。
8.在进一步的技术方案中,泵体内部采集子模块的测定结果与设定的危险工况的流
量与颗粒局部浓度相此较,对各水力级的堵塞风险进行预判,采用堵塞风险评级方法给出各水力级的运行危险状况评级,分为有风险和无风险。
9.在进一步的技术方案中,当无轴泵内危险工况评级为有风险时,对运行状况评级为有风险的水力级,采用抗颗粒堵塞算法控制该水力级上游和(或)下游水力级的转速,缓解有堵塞风险的水力级的颗粒聚集状况,提高颗粒群通过性能和泵运行可靠性,循环检测,闭环调控,直到泵各水力级评级均为无风险。
10.在进一步的技术方案中,根据堵塞风险评级为有风险的水力级是最上一级、中间级还是最下一级,采取不同的控制策略,若为中间级,控制器驱动下游水力级叶轮加快旋转,加速该水力级导叶流道处颗粒流动;同时驱动上游水力级减小转速,减少输送人该水力级的上游颗粒,若为最上级,则驱动下游水力级减小转速,若为最下级,则驱动上游水力级增大转速,加速颗粒流出危险工况的水力级,缓解颗粒聚集状况。
11.在进一步的技术方案中,当无轴泵内危险工况评级为无风险时,启动扭矩平衡模式,通过扭矩平衡算法,驱使转速调节器将各水力级数字信号输送给变频器,变频器改变驱动电路的电源频率,驱动电路驱动电机转动从而调控电机转速,以达到无轴泵整体扭矩平衡。
12.在进一步的技术方案中,当无轴泵内危险工况评级为无风险时启动,经过扭矩平衡算法闭环运算,获得各水力级的转速,启用扭矩平衡模式进行转速调控,以达到无轴泵运行时的扭矩平衡。
13.在进一步的技术方案中,转速调节器将接收到的各水力级的电机位置和扭矩数字信号传送给pi调节器,pi调节器将接收到的数字信号处理生成调控指令传输给pwm脉宽调制器,pwm脉宽调制生成电平指令给驱动电路,驱动电路控制电机进行正确换向,保证电机转子换向同步于定子磁场,使电机同步转速均衡。
14.在进一步的技术方案中,所述无轴泵为包含但不限于两级的偶数级水力级,为保持颗粒沿轴向单向输送,各水力级的连接方式为混连方式,相邻两台电机转向相反,叶轮(泵级结构)的型式相反,叶轮反向布置,以助力无轴泵的扭矩总和达到平衡。
15.在进一步的技术方案中,无轴泵电机及控制器的供电采用深海同轴电缆进行供电和通信,发电装置位于船上,通过动力线与电机控制器连接。
16.在进一步的技术方案中,电机控制器外壳,包括可以牢固啮合的控制器上盖和控制器下盖,用于电机控制器的防水。
17.在进一步的技术方案中,电机的定子外壁为肋片结构,设有接线孔,内部含有绕组。控制器通过引线与定子上开设的接线孔连接。
18.在进一步的技术方案中,采样模块采集各类物理量数据,数据传送到can总线上,并传送到当前主控。
19.本发明的有益效果是:
20.1、本发明阐述的无轴混输泵通过将电机驱动及泵的转子进行高度耦合,将传统多级混输泵的轴驱动方式转化为布置在泵内各水力级的分布式多源电机驱动方式,使得每一水力级的电机转子可以根据该级泵水力部件运转产生的负载独立调控这一级泵的转速。根据水力级个数的不同,无轴泵在系统动力配置和动力设备的选择上有所不同,但在测控方案、控制流程、控制逻辑方面是兼容的。各水力级的驱动电机相互独立,通过特定算法实现
电机转速以及方向的不同设定,使得无轴泵由各水力级传递的扭矩总和达到平衡,减少因为扭矩原因导致的泵体故障,
21.2、本发明提供的调控系统,包括了扭矩平衡调节、颗粒堵塞预防等功能。由于模块化的设计,各个水力级的驱动电机相互独立,因此通过特定的调节机制,可以实现每一单元的水力级电机转速以及方向的不同,通过实现电机转速以及方向的不同设定,使得每一水力级的扭矩总和达到平衡,减少因为扭矩原因导致的泵体故障同时保证混输泵在水下工作的稳定性,提高混输泵的运行安全性和工作效率,改善输送泵运行时的效率和颗粒通过性能,保证扬矿系统持续稳定高效作业,
22.3、电机的外壳以及前推力轴承和后推力轴承选用耐海水腐蚀的特殊金属材料制造,全面有效地防止海水侵蚀。
附图说明
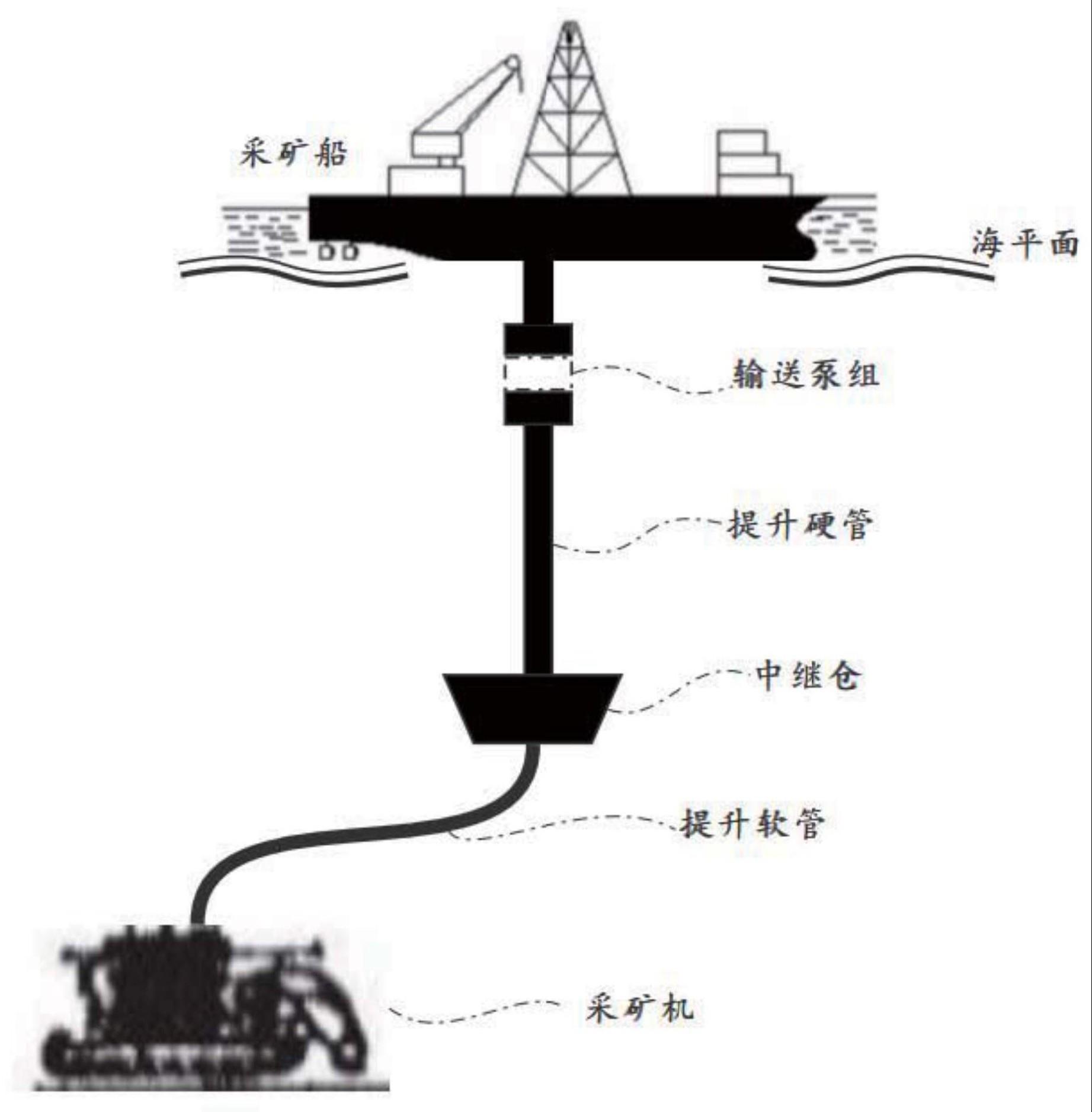
23.图1是本发明的采矿系统示意图;
24.图2是本发明的主控制器和无轴泵控制器连接图;
25.图3是本发明的无轴泵工作的示意图;
26.图4是本发明的硬件连接图;
27.图5是本发明的控制逻辑流程图。
具体实施方式
28.下面结合附图对本发明的实施例作进一步说明。
29.实施例:
30.如图1、图3所示,一种深海采矿无轴输送泵的多源驱动分布式调控系统,包括调控系统,调控系统包括无轴泵及固定连接的变频电机、本地控制器、水面控制器、与控制器相连的通讯装置、采集模块和执行元件;
31.无轴泵采用模块化的设计,各个水力级的驱动电机相互独立,水力级数量为偶数个,相邻水力级叶轮旋转方向相反,以助力无轴泵整体扭矩趋于平衡;
32.无轴泵为包含但不限于两级的偶数级水力级。为保持颗粒沿轴向单向输送,各水力级的连接方式为混连方式,相邻两台电机转向相反,叶轮(泵级结构)的型式相反。叶轮反向布置,以利于无轴泵的扭矩总和达到平衡。轴泵的控制系统由位于采矿船上的主控制器和位于无轴泵上的本地控制模块组成。
33.如图2所示,控制系统由位于采矿船上的主控制器和位于无轴泵上的本地控制模块构成。本地控制器模块由一个工作控制器和一个备用控制器组成。工作控制器和备用控制器之间并通连接且通过can总线与主控制器之间实现通讯,主控制器控制工作控制器和备用控制器之间的切换。控制器模块数与提升泵的数量相等,即每个泵配一个控制器模块。传感器模块,变频器,驱动电路数量与泵内水力级的级数相等,即每一水力级配一个传感器模块,变频器和驱动电路。主控制器控制工作控制器和备用控制器之间的切换,具体控制步骤如下:(1)工作控制器和备用控制器之间并通连接且通过can总线与主控制器之间实现通讯,(2)开机后主控制器自动通过can总线实现与工作控制器之间的通讯并实时检测与工作控制器之间的通讯信号是否中断,若主控制器检测到与工作控制器之间的通讯中断,或者
工作控制器出现运行故障。则会立刻通过can总线切换到备用控制器实现主控制器与控制器模块的正常通讯,避免因工作控制器停工出现整个控制系统的局部瘫痪,影响泵的正常运转和出现恶劣工况时无法检测的情况。
34.如图4所示为本发明的一种控制硬件信息传递的结构示意图,主要由传感器模块,主控制器,控制器模块以及变频器,驱动电路等硬件构成。每个控制器包括pwm脉宽调制器,pi调节器,转速调节器,d/a转换器等组成。pwm脉宽调制器信号输出口与驱动电路信号输入口连接;pi调节器的信号输出口与pwm脉宽调制器的信号输入口连接;转速调节器的信号输出口与变频器的信号输入口连接;d/a转换器的信号输出口分别与pi调节器和转速调节器的信号输入口连接;传感器模块的信号输出口与d/a转换器的信号输入口连接;
35.传感器模块包括电机内部传感器和提升泵管道内部传感器。电机内部传感器包含位置传感器和扭矩传感器,水力级流道内部传感器包含颗粒浓度传感器、压差传感器和流量检测传感器。
36.控制器通过安装在各水力级上的采集模块采集各水力级泵体和电机的运行信息,采集模块分为泵体内部采集子模块和电机内部采集子模块,泵体内部采集子模块包括颗粒浓度传感器、压差传感器和流量传感器,泵体内部采集子模块用于监测矿石颗粒浓度、水力级扬程和流量,电机内部内部采集子模块包括位置传感器和扭矩传感器,电机内部采集子模块用于监测电机转子的位置和扭矩,泵体内部采集子模块的测定结果与设定的危险工况的流量与颗粒局部浓度相此较,对各水力级的堵塞风险进行预判,采用堵塞风险评级方法给出各水力级的运行危险状况评级,分为有风险和无风险,当无轴泵内危险工况评级为有风险时,对运行状况评级为有风险的水力级,采用抗颗粒堵塞算法控制该水力级上游和(或)下游水力级的转速,缓解有堵塞风险的水力级的颗粒聚集状况,提高颗粒群通过性能和泵运行可靠性,循环检测,闭环调控,直到泵各水力级评级均为无风险,根据堵塞风险评级为有风险的水力级是最上一级、中间级还是最下一级,采取不同的控制策略,若为中间级,控制器驱动下游水力级叶轮加快旋转,加速该水力级导叶流道处颗粒流动;同时驱动上游水力级减小转速,减少输送人该水力级的上游颗粒,若为最上级,则驱动下游水力级减小转速,若为最下级,则驱动上游水力级增大转速,加速颗粒流出危险工况的水力级,缓解颗粒聚集状况,当无轴泵内危险工况评级为无风险时,启动扭矩平衡模式,通过扭矩平衡算法,驱使转速调节器将各水力级数字信号输送给变频器,变频器改变驱动电路的电源频率,驱动电路驱动电机转动从而调控电机转速,以达到无轴泵整体扭矩平衡,当无轴泵内危险工况评级为无风险时启动,经过扭矩平衡算法闭环运算,获得各水力级的转速,启用扭矩平衡模式进行转速调控,以达到无轴泵运行时的扭矩平衡。
37.如图5所示为本发明的一种控制逻辑流程图,其控制步骤如下:
38.s1,外部电源经过变频器的处理后为控制器模块和驱动电路提供的工作电压,驱动电路控制电机的转动、换向和特殊工况反转;
39.s2,每一水力级所对应的传感器模块里的位置传感器和扭矩传感器以及管道内颗粒浓度传感器和流量检测传感器实时检测电机转子的位置和扭矩信号和提升泵管道内的颗粒浓度和流量信号,将监测到的每一水力级的电机位置和扭矩模拟信号以及泵管内属于每一水力级的颗粒浓度、压差和流量模拟信号传输给d/a转换器,转换为数字信号后发送给转速调节器,转速调节器将接收到的属于每一不同水力级的数字信号进行并储存综合分
析,将综合处理数字结果与给定的阈值进行对此,进行风险评估判断;
40.s3,若综合处理数值信号大于给定的初始阈值,则判断为泵有颗粒堵塞风险,启动抗颗粒堵塞算法。抗颗粒堵塞算法,转速调节器对有堵塞风险的水力级进行定位,以当前定位水力级的数字信号储存结果作为一个反馈信号输送给紧邻该水力级并处于上游和(或)下游的两个水力级对应电机的变频器,以此控制定位水力级的上游水力级的电机适当加速,定位所在水力级下游的电机适当减速,并将电机转速反馈泵控制器。闭环调控直到各水力级内颗粒的通流状况有明显改善,无堵塞风险;
41.s4,转速调节器将无堵塞风险的无轴泵各水力级数字信号处理得到的处理结果与水力级所给定扭矩平衡判据进行对此判断是否需要调速以平衡无轴泵的总扭矩。若综合处理数值信号小于给定的扭矩不平衡阈值,则判断为泵的所有水力级均正常运行;否则,启动扭矩平衡模式。通过扭矩平衡算法,此时转速调节器将步骤2)每一不同水力级数字信号输送给变频器,变频器改变驱动电路的电源频率,驱动电路驱动电机转动从而达到电机调速,由此来平衡电机加速和减速带来的扭矩不平衡问题,避免整个提升泵因扭矩不平衡而导致振动;
42.s5,每次抗颗粒堵塞算法或扭矩平衡算法调速之后需要对电机换向实时校正。转速调节器将接收到的各水力级的电机位置和扭矩数字信号传送给pi调节器,pi调节器将接收到的数字信号处理生成调控指令传输给pwm脉宽调制器,pwm脉宽调制生成电平指令给驱动电路,驱动电路控制电机进行正确换向,保证电机转子换向同步于定子磁场,使电机同步转速均衡。
43.以上实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1