支腿液压控制系统及其控制方法以及高空作业平台与流程
1.本发明涉及高空作业技术领域,特别涉及一种支腿液压控制系统及其控制方法以及高空作业平台。
背景技术:
2.在高空作业技术领域中,为了扩大使用场景,通常会在高空作业平台的底架上安装支腿,通过支腿的液压控制系统来控制支腿油缸的伸缩,从而实现底架调平,以使高空作业平台能够安全地进行高空作业。为了防止支腿油缸软腿,即防止支腿油缸出现无法锁止或保不住压力的情况,传统的支腿液压控制系统使用了两位两通电磁阀和液控单向阀来实现油缸的双重锁止保护,但是在支腿油缸活塞杆缩回的起始阶段,液控单向阀会出现反复迅速通断的现象,从而导致支腿油缸活塞杆在缩回时发出啸叫异响,甚至伴随着高频抖动。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种支腿液压控制系统,能够提高支腿油缸在运动过程中的平稳性。
4.本发明还提出一种具有上述支腿液压控制系统的支腿液压控制系统的控制方法。
5.本发明还提出一种具有上述支腿液压控制系统的高空作业平台。
6.根据本发明第一方面实施例的支腿液压控制系统,包括:第一电磁换向阀,所述第一电磁换向阀的第一油口用于与液压泵连通,所述第一电磁换向阀的第二油口用于与油箱连通,在所述第一电磁换向阀处于第一状态的情况下,所述第一电磁换向阀的第一油口与所述第一电磁换向阀的第三油口连通,所述第一电磁换向阀的第四油口与所述第一电磁换向阀的第二油口连通,在所述第一电磁换向阀处于第二状态的情况下,所述第一电磁换向阀的第一油口与所述第一电磁换向阀的第四油口连通,所述第一电磁换向阀的第三油口与所述第一电磁换向阀的第二油口连通;第二电磁换向阀,所述第二电磁换向阀的第一油口与所述第一电磁换向阀的第三油口连通;油缸组件,所述油缸组件包括多个油缸单元,每个所述油缸单元均包括油缸以及第三电磁换向阀,每个所述第三电磁换向阀的第一油口均与所述第二电磁换向阀的第二油口连通,每个所述油缸的有杆腔均与所述第一电磁换向阀的第四油口连通,且在每个所述油缸单元中,所述第三电磁换向阀的第二油口与所述油缸的无杆腔连通。
7.根据本发明实施例的支腿液压控制系统,至少具有如下有益效果:
8.在上述的支腿液压控制系统中,第一电磁换向阀的第一油口用于与液压泵连通,第一电磁换向阀的第二油口用于与油箱连通,第一电磁换向阀的第三油口与第二电磁换向阀的第一油口连通,第一电磁换向阀的第四油口与每个油缸单元的油缸的有杆腔连通,且第二电磁换向阀的第二油口与每个油缸单元的第三电磁换向阀的第一油口连通,在每个油缸单元中,第三电磁换向阀的第二油口与油缸的无杆腔连通。如此,当需要将高空作业平台举升时,则需使每个油缸单元的油缸的活塞伸出,即可将第一电磁换向阀切换至第一状态,
并且将第二电磁换向阀以及每个油缸单元的第三电磁换向阀均切换至连通状态,则液压泵中的液压油能够依次经过第一电磁换向阀的第一油口、第一电磁换向阀的第三油口、第二电磁换向阀的第一油口、第二电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔中,每个油缸单元的有杆腔中的液压油能够依次经过第一电磁换向阀的第四油口以及第一电磁换向阀的第二油口进入到油箱中,从而能够使得每个油缸单元的油缸的活塞伸出,以使高空作业平台被举升。
9.当上述的高空作业平台被举升到预设高度时,使第二电磁换向阀、每个油缸单元的第三电磁换向阀以及第一电磁换向阀均切换至断开状态,即可将每个油缸单元的油缸锁止。
10.当需要使高空作业平台下降时,则需使每个油缸单元的油缸的活塞收缩,即可将第一电磁换向阀切换至第二状态,并且将第二电磁换向阀以及每个油缸单元的第三电磁换向阀均切换至连通状态,则液压泵中的液压油能够依次经过第一电磁换向阀的第一油口、第一电磁换向阀的第四油口进入到每个油缸单元的有杆腔中,每个油缸单元的油缸的无杆腔中的液压油能够依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀的第二油口、第二电磁换向阀的第一油口、第一电磁换向阀的第三油口以及第一电磁换向阀的第二油口进入到油箱中,从而能够使得每个油缸单元的油缸的活塞收缩,以使高空作业平台下降。
11.当上述的高空作业平台下降到预设高度时,使第二电磁换向阀、每个油缸单元的第三电磁换向阀以及第一电磁换向阀切换至断开状态,即可将每个油缸单元的油缸锁止。
12.在高空作业平台启动下降时,即每个油缸单元的油缸的活塞启动收缩时,第二电磁换向阀、每个油缸单元的第三电磁换向阀以及第一电磁换向阀不会由于液压油的压力的突变而快速切换通断状态,则每个油缸单元的油缸的活塞启动收缩时,能够避免油缸发出啸叫异响,并且能够避免油缸发生高频抖动,以此来提高支腿油缸在运动过程中的平稳性。
13.根据本发明的一些实施例,所述第二电磁换向阀位于所述第三电磁换向阀与所述第一电磁换向阀之间,在所述第一电磁换向阀处于所述第一状态,且所述第二电磁换向阀以及所述第三电磁换向阀均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口、所述第二电磁换向阀的第一油口、所述第二电磁换向阀的第二油口、所述第三电磁换向阀的第一油口以及所述第三电磁换向阀的第二油口进入到所述油缸的无杆腔中,所述油缸的有杆腔中的液压油能够依次经过所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中,在所述第一电磁换向阀处于所述第二状态,且所述第二电磁换向阀以及所述第三电磁换向阀均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口以及所述第一电磁换向阀的第四油口进入到所述油缸的有杆腔中,所述油缸的无杆腔中的液压油能够依次经过所述第三电磁换向阀的第二油口、所述第三电磁换向阀的第一油口、所述第二电磁换向阀的第二油口、所述第二电磁换向阀的第一油口、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到所述油箱中。
14.根据本发明的一些实施例,多个所述油缸单元包括第一油缸单元、第二油缸单元、第三油缸单元以及第四油缸单元,所述第一油缸单元包括第一油缸以及第三电磁换向阀a,
所述第二油缸单元包括第二油缸以及第三电磁换向阀b,所述第三油缸单元包括第三油缸以及第三电磁换向阀c,所述第四油缸单元包括第四油缸以及第三电磁换向阀d;
15.其中,所述第一油缸的无杆腔与所述第三电磁换向阀a的第二油口连通,所述第二油缸的无杆腔与所述第三电磁换向阀b的第二油口连通,所述第三油缸的无杆腔与所述第三电磁换向阀c的第二油口连通,所述第四油缸的无杆腔与所述第三电磁换向阀d的第二油口连通,且所述第三电磁换向阀a的第一油口、所述第三电磁换向阀b的第一油口、所述第三电磁换向阀c的第一油口以及所述第三电磁换向阀d的第一油口均与所述第二电磁换向阀的第二油口连通,所述第一油缸的有杆腔、所述第二油缸的有杆腔、所述第三油缸的有杆腔以及所述第四油缸的有杆腔均与所述第一电磁换向阀的第四油口连通。
16.根据本发明的一些实施例,所述支腿液压控制系统还包括第一管路以及第二管路,所述第一管路的一端与所述第一油缸的无杆腔连通,所述第一管路的另一端与所述第一电磁换向阀的第三油口连通,所述第二电磁换向阀以及所述第三电磁换向阀a均设置在所述第一管路上,所述第二管路的一端与所述第一油缸的有杆腔连通,所述第二管路的另一端与所述第一电磁换向阀的第四油口连通;
17.其中,在所述第一电磁换向阀处于所述第一状态,且所述第二电磁换向阀以及所述第三电磁换向阀a均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口以及所述第一管路进入到所述第一油缸的无杆腔中,所述第一油缸的有杆腔中的液压油能够依次经过所述第二管路、所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中,在所述第一电磁换向阀处于所述第二状态,且所述第二电磁换向阀以及所述第三电磁换向阀a均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第四油口以及所述第二管路进入到所述第一油缸的有杆腔中,所述第一油缸的无杆腔中的液压油能够依次经过所述第一管路、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到所述油箱中。
18.根据本发明的一些实施例,所述支腿液压控制系统还包括第三管路以及第四管路,所述第三管路的一端与所述第二油缸的无杆腔连通,所述第三管路的另一端与所述第一管路位于所述第二电磁换向阀与所述第三电磁换向阀a之间的管路连通,所述第三电磁换向阀b设置于所述第三管路上,所述第四管路的一端与所述第二油缸的有杆腔连通,所述第四管路的另一端与所述第一电磁换向阀的第四油口连通;
19.其中,在所述第一电磁换向阀处于所述第一状态,且所述第二电磁换向阀以及所述第三电磁换向阀b均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口、所述第一管路以及所述第三管路进入到所述第二油缸的无杆腔中,所述第二油缸的有杆腔中的液压油能够通过依次经过第四管路、所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中,在所述第一电磁换向阀处于所述第二状态,且所述第二电磁换向阀以及所述第三电磁换向阀b均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第四油口以及所述第四管路进入到所述第二油缸的有杆腔中,所述第二油缸的无杆腔中的液压油能够依次经过所述第三管路、所述第一管路、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到所述油箱中。
20.根据本发明的一些实施例,所述支腿液压控制系统还包括第五管路以及第六管路,所述第五管路的一端与所述第三油缸的无杆腔连通,所述第五管路的另一端与所述第一管路位于所述第二电磁换向阀与所述第三电磁换向阀a之间的管路连通,所述第三电磁换向阀c设置于所述第五管路上,所述第六管路的一端与所述第三油缸的有杆腔连通,所述第六管路的另一端与所述第一电磁换向阀的第四油口连通;
21.其中,在所述第一电磁换向阀处于所述第一状态,且所述第二电磁换向阀以及所述第三电磁换向阀c均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口、所述第一管路以及所述第五管路进入到所述第三油缸的无杆腔中,所述第三油缸的有杆腔中的液压油能够依次经过所述第六管路、所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中,在所述第一电磁换向阀处于所述第二状态,且所述第二电磁换向阀以及所述第三电磁换向阀c均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第四油口以及所述第六管路进入到所述第三油缸的有杆腔中,所述第三油缸的无杆腔中的液压油能够依次经过所述第五管路、所述第一管路、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到所述油箱中。
22.根据本发明的一些实施例,所述支腿液压控制系统还包括第七管路以及第八管路,所述第七管路的一端与所述第四油缸的无杆腔连通,所述第七管路的另一端与所述第一管路位于所述第二电磁换向阀与所述第三电磁换向阀a之间的管路连通,所述第三电磁换向阀d设置于所述第七管路上,所述第八管路的一端与所述第四油缸的有杆腔连通,所述第八管路的另一端与所述第一电磁换向阀的第四油口连通;
23.其中,在所述第一电磁换向阀处于所述第一状态,且所述第二电磁换向阀以及所述第三电磁换向阀d均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口、所述第一管路以及所述第七管路进入到所述第四油缸的无杆腔中,所述第四油缸的有杆腔中的液压油能够依次经过所述第八管路、所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中,在所述第一电磁换向阀处于所述第二状态,且所述第二电磁换向阀以及所述第三电磁换向阀d均得电的情况下,所述液压泵中的液压油能够依次经过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第四油口以及所述第八管路进入到所述第四油缸的有杆腔中,所述第四油缸的无杆腔中的液压油能够依次经过所述第七管路、所述第一管路、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到所述油箱中。
24.根据本发明第二方面实施例的支腿液压控制系统的控制方法,包括:在第一情况下:控制驱动源得电,使驱动源带动液压泵输出液压油;控制第一电磁换向阀得电,使所述第一电磁换向阀切换至第一状态;控制第二电磁换向阀得电,使所述第二电磁换向阀的第一油口与所述第二电磁换向阀的第二油口连通;控制每个油缸单元的第三电磁换向阀得电,使所述第三电磁换向阀的第一油口与所述第三电磁换向阀的第二油口连通,以使所述液压泵中的液压油依次通过所述第一电磁换向阀的第一油口、所述第一电磁换向阀的第三油口、所述第二电磁换向阀的第一油口、所述第二电磁换向阀的第二油口、每个所述油缸单元的所述第三电磁换向阀的第一油口以及每个所述油缸单元的所述第三电磁换向阀的第二油口进入到每个所述油缸单元的油缸的无杆腔内,并使每个所述油缸单元的所述油缸的
有杆腔内的液压油依次通过所述第一电磁换向阀的第四油口以及所述第一电磁换向阀的第二油口进入到所述油箱中;控制所述驱动源以及每个所述油缸单元的所述第三电磁换向阀失电,以使每个所述油缸单元的所述油缸被锁止;在所述驱动源以及每个所述油缸单元的所述第三电磁换向阀失电的预设时间内,控制所述第二电磁换向阀以及所述第一电磁换向阀失电。
25.根据本发明实施例的支腿液压控制系统的控制方法,至少具有如下有益效果:
26.在上述的支腿液压控制系统的控制方法中,控制驱动源得电,使驱动源带动液压泵输出液压油,控制第一电磁换向阀得电,使第一电磁换向阀切换至第一状态,控制第二电磁换向阀以及每个油缸单元的第三电磁换向阀得电,则能使液压泵中的液压油依次经过第一电磁换向阀、第二电磁换向阀以及每个油缸单元的第三电磁换向阀进入到每个油缸单元的油缸的无杆腔中,并且使每个油缸单元的油缸的有杆腔中的液压油经过第一电磁换向阀进入到油箱中。从而,在第一电磁换向阀处于第一状态,且第二电磁换向阀以及每个油缸单元的第三电磁换向阀得电的情况下,每个油缸单元的油缸能够伸出,以此来实现对高空作业平台的举升。在这个过程中,液压泵中的液压油依次经过第一电磁换向阀的第一油口、第一电磁换向阀的第三油口、第二电磁换向阀的第一油口、第二电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔中;每个油缸单元的油缸的有杆腔中的液压油能够依次经过第一电磁换向阀的第四油口以及第一电磁换向阀的第二油口进入到油箱中。
27.当上述的高空作业平台被举升到预设高度时,控制驱动源以及每个油缸单元的第三电磁换向阀失电,则能使驱动源以及每个油缸单元的第三电磁换向阀切换至断开状态,即可将每个油缸单元的油缸锁止。
28.在驱动源以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀以及第一电磁换向阀失电,即在驱动源以及每个油缸单元的第三电磁换向阀失电的情况下,延时控制第二电磁换向阀以及第一电磁换向阀失电。如此,在驱动源以及每个油缸单元的第三电磁换向阀失电的情况下,能够降低连接第二电磁换向阀与每个油缸单元的第三电磁换向阀之间的管路中的液压油的压力,从而在对管路进行检修时能够避免管路中的液压油从管路中喷射至外界,以此来提高在对管路检修时的安全性。
29.根据本发明第三方面实施例的支腿液压控制系统的控制方法,包括:在第二情况下:控制驱动源得电,使驱动源带动液压泵输出液压油;控制第一电磁换向阀得电,使所述第一电磁换向阀切换至第二状态;控制第二电磁换向阀得电,使所述第二电磁换向阀的第一油口与所述第二电磁换向阀的第二油口连通;控制每个油缸单元的第三电磁换向阀得电,使所述第三电磁换向阀的第一油口与所述第三电磁换向阀的第二油口连通,以使所述液压泵中的液压油依次通过所述第一电磁换向阀的第一油口以及所述第一电磁换向阀的第四油口进入到每个所述油缸单元的油缸的有杆腔中,并使每个所述油缸单元的所述油缸的无杆腔内的液压油依次通过每个所述油缸单元的所述第三电磁换向阀的第二油口、每个所述油缸单元的所述第三电磁换向阀的第一油口、所述第二电磁换向阀的第二油口、所述第二电磁换向阀的第一油口、所述第一电磁换向阀的第三油口以及所述第一电磁换向阀的第二油口进入到油箱中;控制所述驱动源以及每个所述油缸单元的所述第三电磁换向阀失电,以使每个所述油缸单元的所述油缸被锁止;在所述驱动源以及每个所述油缸单元的所
述第三电磁换向阀失电的预设时间内,控制所述第二电磁换向阀以及所述第一电磁换向阀失电。
30.根据本发明实施例的支腿液压控制系统的控制方法,至少具有如下有益效果:
31.在上述的支腿液压控制系统的控制方法中,控制驱动源得电,使驱动源带动液压泵输出液压油,控制第一电磁换向阀得电,使第一电磁换向阀切换至第二状态,控制第二电磁换向阀以及每个油缸单元的第三电磁换向阀得电,则能使液压泵中的液压油经过第一电磁换向阀进入到每个油缸单元的油缸的有杆腔中,并且使每个油缸单元的油缸的无杆腔中的液压油依次经过每个油缸单元的第三电磁换向阀、第二电磁换向阀以及第一电磁换向阀进入到油箱中。从而,在第一电磁换向阀处于第二状态,且第二电磁换向阀以及每个油缸单元的第三电磁换向阀得电的情况下,每个油缸单元的油缸能够收缩,以此来实现高空作业平台的下降。在这个过程中,液压泵中的液压油能够依次经过第一电磁换向阀的第一油口以及第一电磁换向阀的第四油口进入到每个油缸单元的油缸的有杆腔中;每个油缸单元的油缸的无杆腔中的液压油缸能够依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀的第二油口、第二电磁换向阀的第一油口、第一电磁换向阀的第三油口以及第一电磁换向阀的第二油口进入到油箱中。
32.当上述的高空作业平台下降到预设高度时,控制驱动源以及每个油缸单元的第三电磁换向阀失电,则能使驱动源以及每个油缸单元的第三电磁换向阀切换至断开状态,即可将每个油缸单元的油缸锁止。
33.在驱动源以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀以及第一电磁换向阀失电,即在驱动源以及每个油缸单元的第三电磁换向阀失电的情况下,延时控制第二电磁换向阀以及第一电磁换向阀失电。如此,在驱动源以及每个油缸单元的第三电磁换向阀失电的情况下,能够降低连接第一电磁换向阀与每个油缸单元的无杆腔之间的管路中的液压油的压力,从而在对管路进行检修时能够避免管路中的液压油从管路中喷射至外界,以此来提高在对管路检修时的安全性。
34.另外,在高空作业平台启动下降时,即每个油缸单元的油缸的活塞启动收缩时,第二电磁换向阀、每个油缸单元的第三电磁换向阀以及第一电磁换向阀得电之后不会由于液压油的压力的突变而快速切换通断状态,则每个油缸单元的油缸的活塞启动收缩时,能够避免油缸发出啸叫异响,并且能够避免油缸发生高频抖动,以此来提高支腿油缸在运动过程中的平稳性。
35.根据本发明第四方面实施例的高空作业平台,包括:如上所述的支腿液压控制系统;或者应用了如上所述的支腿液压控制系统的控制方法。
36.根据本发明实施例的高空作业平台,至少具有如下有益效果:
37.在上述的高空作业平台中,在高空作业平台启动下降时,由于上述的支腿液压控制系统能够提高支腿油缸在运动过程中的平稳性,则上述的高空作业平台在升降的过程中具有较好的平稳性。且由于上述的支腿液压控制系统能够对每个油缸单元的油缸实现锁止,因此,上述的高空作业平台在预设高度进行工作时具有较好的安全性。
附图说明
38.下面结合附图和实施例对本发明做进一步的说明,其中:
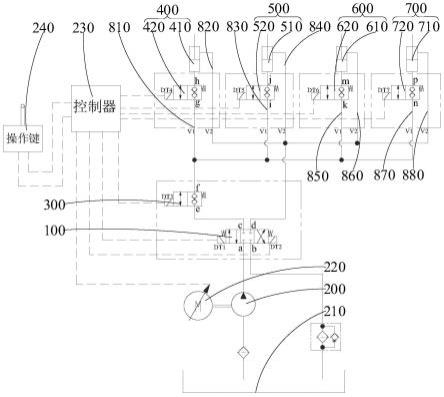
39.图1为本发明一种实施例的支腿液压控制系统的结构示意图;
40.图2为本发明一种实施例的第一电磁换向阀处于第一状态时的支腿液压控制系统的结构示意图;
41.图3为本发明一种实施例的第一电磁换向阀处于第二状态时的支腿液压控制系统的结构示意图。
42.附图标号:
43.100、第一电磁换向阀;
44.200、液压泵;210、油箱;220、驱动源;230、控制器;240、操作键;
45.300、第二电磁换向阀;
46.400、第一油缸单元;410、第一油缸;420、第三电磁换向阀a;
47.500、第二油缸单元;510、第二油缸;520、第三电磁换向阀b;
48.600、第三油缸单元;610、第三油缸;620、第三电磁换向阀c;
49.700、第四油缸单元;710、第四油缸;720、第三电磁换向阀d;
50.810、第一管路;820、第二管路;830、第三管路;840、第四管路;850、第五管路;860、第六管路;870、第七管路;880、第八管路。
具体实施方式
51.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
52.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
53.在本发明的描述中,多个指的是两个以上。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
54.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
55.参照图1至图3所示,本发明一种实施例的支腿液压控制系统,包括:第一电磁换向阀100、第二电磁换向阀300以及油缸组件。
56.具体地,第一电磁换向阀100的第一油口a用于与液压泵200连通,第一电磁换向阀100的第二油口b用于与油箱210连通,在第一电磁换向阀100处于第一状态的情况下,第一电磁换向阀100的第一油口a与第一电磁换向阀100的第三油口c连通,第一电磁换向阀100的第四油口d与第一电磁换向阀100的第二油口b连通,在第一电磁换向阀100处于第二状态的情况下,第一电磁换向阀100的第一油口a与第一电磁换向阀100的第四油口d连通,第一电磁换向阀100的第三油口c与第一电磁换向阀100的第二油口b连通;第二电磁换向阀300的第一油口e与第一电磁换向阀100的第三油口c连通;油缸组件包括多个油缸单元,每个油
缸单元均包括油缸以及第三电磁换向阀,每个第三电磁换向阀的第一油口均与第二电磁换向阀300的第二油口f连通,每个油缸的有杆腔均与第一电磁换向阀100的第四油口d连通,且在每个油缸单元中,第三电磁换向阀的第二油口与油缸的无杆腔连通;其中,第二电磁换向阀300以及每个油缸单元的第三电磁换向阀用于锁止每个油缸单元的油缸。
57.具体地,在其中的一个实施例中,第一电磁换向阀100可以是三位四通电磁换向阀,除此之外,在其他的实施例中,第一电磁换向阀100还可以是其它类型的电磁换向阀,如三位五通电磁换向阀,或带手动控制功能的电磁换向阀等。
58.进一步地,在其中的一个实施例中,第二电磁换向阀300与第三电磁换向阀可以是两位两通电磁换向阀,除此之外,在其他的实施例中,第二电磁换向阀300与第三电磁换向阀还可以是其它类型的电磁换向阀,如两位三通电磁换向阀,或带手动控制功能的电磁换向阀等。
59.在上述的支腿液压控制系统中,第一电磁换向阀100的第一油口a用于与液压泵200连通,第一电磁换向阀100的第二油口b用于与油箱210连通,第一电磁换向阀100的第三油口c与第二电磁换向阀300的第一油口e连通,第一电磁换向阀100的第四油口d与每个油缸单元的油缸的有杆腔连通,且第二电磁换向阀300的第二油口f与每个油缸单元的第三电磁换向阀的第一油口连通,在每个油缸单元中,第三电磁换向阀的第二油口与油缸的无杆腔连通。如此,当需要将高空作业平台举升时,则需使每个油缸单元的油缸的活塞伸出,即可将第一电磁换向阀100切换至第一状态,并且将第二电磁换向阀300以及每个油缸单元的第三电磁换向阀切换至连通状态,则液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔中,每个油缸单元的有杆腔中的液压油能够依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,从而能够使得每个油缸单元的油缸的活塞伸出,以使高空作业平台被举升。
60.当上述的高空作业平台被举升到预设高度时,使第二电磁换向阀300、每个油缸单元的第三电磁换向阀以及第一电磁换向阀100切换至断开状态,即可将每个油缸单元的油缸锁止。
61.当需要使高空作业平台下降时,则需使每个油缸单元的油缸的活塞收缩,即可将第一电磁换向阀100切换至第二状态,并且将第二电磁换向阀300以及每个油缸单元的第三电磁换向阀切换至连通状态,则液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d进入到每个油缸单元的有杆腔中,每个油缸单元的油缸的无杆腔中的液压油能够依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中,从而能够使得每个油缸单元的油缸的活塞收缩,以使高空作业平台下降。
62.当上述的高空作业平台下降到预设高度时,使第二电磁换向阀300、每个油缸单元的第三电磁换向阀以及第一电磁换向阀100切换至断开状态,即可将每个油缸单元的油缸
锁止。
63.在高空作业平台启动下降时,即每个油缸单元的油缸的活塞启动收缩时,第二电磁换向阀300、每个油缸单元的第三电磁换向阀以及第一电磁换向阀100不会由于液压油的压力的突变而快速切换通断状态,则每个油缸单元的油缸的活塞启动收缩时,能够避免油缸发出啸叫异响,并且能够避免油缸发生高频抖动,以此来提高支腿油缸在运动过程中的平稳性。
64.参照图1至图3所示,可以理解的是,第二电磁换向阀300位于第三电磁换向阀与第一电磁换向阀100之间,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及第三电磁换向阀均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀的第一油口以及第三电磁换向阀的第二油口进入到油缸的无杆腔内,油缸的有杆腔内的液压油能够依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及第三电磁换向阀均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第四油口d进入到油缸的有杆腔中,油缸的无杆腔中的液压油能够通过第三电磁换向阀的第二油口、第三电磁换向阀的第一油口、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到所述油箱210中。
65.如此,当需要将高空作业平台举升时,则需使每个油缸单元的油缸的活塞伸出,即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300以及每个油缸单元的第三电磁换向阀均得电,则液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔中,每个油缸单元的有杆腔中的液压油能够依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,从而能够使得每个油缸单元的油缸的活塞伸出,以使高空作业平台被举升。
66.当需要使高空作业平台下降时,则需使每个油缸单元的油缸的活塞收缩,即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300以及每个油缸单元的第三电磁换向阀均得电,则液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d进入到每个油缸单元的有杆腔中,每个油缸单元的油缸的无杆腔中的液压油能够依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中,从而能够使得每个油缸单元的油缸的活塞收缩,以使高空作业平台下降。
67.参照图1所示,可以理解的是,多个油缸单元包括第一油缸单元400、第二油缸单元500、第三油缸单元600以及第四油缸单元700,第一油缸单元400包括第一油缸410以及第三电磁换向阀a420,第二油缸单元500包括第二油缸510以及第三电磁换向阀b520,第三油缸
单元600包括第三油缸610以及第三电磁换向阀c620,第四油缸单元700包括第四油缸710以及第三电磁换向阀d720;其中,第一油缸410的无杆腔与第三电磁换向阀a420的第二油口h连通,第二油缸510的无杆腔与第三电磁换向阀b520的第二油口j连通,第三油缸610的无杆腔与第三电磁换向阀c620的第二油口m连通,第四油缸710的无杆腔与第三电磁换向阀d720的第二油口p连通,且第三电磁换向阀a420的第一油口g、第三电磁换向阀b520的第一油口i、第三电磁换向阀c620的第一油口k以及第三电磁换向阀d720的第一油口n均与第二电磁换向阀300的第二油口f连通,第一油缸410的有杆腔、第二油缸510的有杆腔、第三油缸610的有杆腔以及第四油缸710的有杆腔均与第一电磁换向阀100的第四油口d连通。
68.如此,当需要将高空作业平台举升时,则需使第一油缸单元400的第一油缸410、第二油缸单元500的第二油缸510、第三油缸单元600的第三油缸610以及第四油缸单元700的第四油缸710同时伸出。即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300、第一油缸单元400的第三电磁换向阀a420、第一油缸单元400的第三电磁换向阀b520、第一油缸单元400的第三电磁换向阀c620以及第一油缸单元400的第三电磁换向阀d720均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100进入到第二电磁换向阀300中,再从第二电磁换向阀300中经过第三电磁换向阀a420、第三电磁换向阀b520、第三电磁换向阀c620以及第三电磁换向阀d720分别进入到第一油缸410的无杆腔中、第二油缸510的无杆腔中、第三油缸610的无杆腔中以及第四油缸710的无杆腔中,第一油缸410的有杆腔中的液压油、第二油缸510的有杆腔中的液压油、第三油缸610的有杆腔中的液压油以及第四油缸710的有杆腔中的液压油均能够经过第一电磁换向阀100进入到油箱210中,从而能够使得第一油缸410的活塞、第二油缸510的活塞、第三油缸610的活塞以及第四油缸710的活塞同时伸出,以使高空作业平台被举升。在这个过程中,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀a420的第一油口g以及第三电磁换向阀a420的第二油口h进入到第一油缸410的无杆腔中;依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀b520的第一油口i以及第三电磁换向阀b520的第二油口j进入到第二油缸510的无杆腔中;依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀c620的第一油口k以及第三电磁换向阀c620的第二油口m进入到第三油缸610的无杆腔中;以及依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀d720的第一油口n以及第三电磁换向阀d720的第二油口p进入到第四油缸710的无杆腔中;第一油缸410的有杆腔中的液压油、第二油缸510的有杆腔中的液压油、第三油缸610的有杆腔中的液压油以及第四油缸710的有杆腔中的液压油能够依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中。
69.当需要使高空作业平台下降时,则需使第一油缸单元400的第一油缸410、第二油缸单元500的第二油缸510、第三油缸单元600的第三油缸610以及第四油缸单元700的第四油缸710同时收缩。即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300、第一油缸单元400的第三电磁换向阀a420、第一油缸单元400的第三电磁换向阀b520、
第一油缸单元400的第三电磁换向阀c620以及第一油缸单元400的第三电磁换向阀d720均得电,则液压泵200中的液压油能够经过第一电磁换向阀100分别进入到第一油缸410的有杆腔中、第二油缸510的有杆腔中、第三油缸610的有杆腔中以及第四油缸710的有杆腔中;第一油缸410的无杆腔中的液压油、第二油缸510的无杆腔中的液压油、第三油缸610的无杆腔中的液压油以及第四油缸710的无杆腔中的液压油能够分别进入到第三电磁换向阀a420、第三电磁换向阀b520、第三电磁换向阀c620以及第三电磁换向阀d720中,再经过第三电磁换向阀a420、第三电磁换向阀b520、第三电磁换向阀c620以及第三电磁换向阀d720依次进入到第二电磁换向阀300以及第一电磁换向阀100中,最后经过第一电磁换向阀100进入到油箱210中,从而能够使得第一油缸410的活塞、第二油缸510的活塞、第三油缸610的活塞以及第四油缸710的活塞同时收缩,以使高空作业平台下降。在这个过程中,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第四油口d分别进入到第一油缸410的有杆腔中、第二油缸510的有杆腔中、第三油缸610的有杆腔中以及第四油缸710的有杆腔中;第一油缸410的无杆腔中的液压油能够依次经过第三电磁换向阀a420的第二油口h、第三电磁换向阀a420的第一油口g、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中;第二油缸510的无杆腔中的液压油能够依次经过第三电磁换向阀b520的第二油口j、第三电磁换向阀b520的第一油口i、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中;第三油缸610的无杆腔中的液压油能够依次经过第三电磁换向阀c620的第二油口m、第三电磁换向阀c620的第一油口k、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中;第四油缸710的无杆腔中的液压油能够依次经过第三电磁换向阀d720的第二油口p、第三电磁换向阀d720的第一油口n、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
70.参照图1至图3所示,可以理解的是,支腿液压控制系统还包括第一管路810以及第二管路820,第一管路810的一端与第一油缸410的无杆腔连通,第一管路810的另一端与第一电磁换向阀100的第三油口c连通,第二电磁换向阀300以及第三电磁换向阀a420均设置在第一管路810上,第二管路820的一端与第一油缸410的有杆腔连通,第二管路820的另一端与第一电磁换向阀100的第四油口d连通;其中,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及第三电磁换向阀a420均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c以及第一管路810进入到第一油缸410的无杆腔内,第一油缸410的有杆腔内的液压油能够依次经过第二管路820、第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及第三电磁换向阀a420均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d以及第二管路820进入到第一油缸410的有杆腔内,第一油缸410的无杆腔内的液压油能够依次经过第一管路810、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
71.如此,当需要将高空作业平台举升时,则需使第一油缸410伸出。即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300以及第三电磁换向阀a420均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a进入到第一电磁换向阀100的第三油口c,再经过与第一电磁换向阀100的第三油口c连通的第一管路810进入到第一油缸410的无杆腔中,第一油缸410的有杆腔中的液压油能够先进入到第二管路820中,再经过与第二管路820连通的第一电磁换向阀100的第四油口d进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第四油口d连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第一油缸410的活塞能够伸出。在这个过程中,液压泵200中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、第三电磁换向阀a420的第一油口g以及第三电磁换向阀a420的第二油口h进入到第一油缸410的无杆腔中。
72.当需要使高空作业平台下降时,则需使第一油缸410收缩。即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300以及第三电磁换向阀a420均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a进入到第一电磁换向阀100的第四油口d,再经过与第一电磁换向阀100的第四油口d连通的第二管路820进入到第一油缸410的有杆腔中,第一油缸410的无杆腔中的液压油能够先进入到第一管路810中,再经过与第一管路810连通的第一电磁换向阀100的第三油口c进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第三油口c连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第一油缸410的活塞能够收缩。在这个过程中,第一油缸410的无杆腔中的液压油在流经第一管路810时,能够依次经过第三电磁换向阀a420的第二油口h、第三电磁换向阀a420的第一油口g、第二电磁换向阀300的第二油口f以及第二电磁换向阀300的第一油口e进入到第一电磁换向阀100的第三油口c中。
73.参照图1至图3所示,可以理解的是,支腿液压控制系统还包括第三管路830以及第四管路840,第三管路830的一端与第二油缸510的无杆腔连通,第三管路830的另一端与第一管路810位于第二电磁换向阀300与第三电磁换向阀a420之间的管路连通,第三电磁换向阀b520设置于第三管路830上,第四管路840的一端与第二油缸510的有杆腔连通,第四管路840的另一端与第一电磁换向阀100的第四油口d连通;其中,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及第三电磁换向阀b520均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第一管路810以及第三管路830进入到第二油缸510的无杆腔内,第二油缸510的有杆腔内的液压油能够依次经过第四管路840、第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及第三电磁换向阀b520均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d以及第四管路840进入到第二油缸510的有杆腔内,第二油缸510的无杆腔内的液压油能够依次经过第三管路830、第一管路810、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
74.如此,当需要将高空作业平台举升时,则需使第二油缸510伸出。即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300以及第三电磁换向阀b520均得电,
则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第三油口c进入到与第一电磁换向阀100的第三油口c连通的第一管路810中,再经过与第一管路810连通的第三管路830进入到第二油缸510的无杆腔中,第二油缸510的有杆腔中的液压油能够先进入到第四管路840中,再经过与第四管路840连通的第一电磁换向阀100的第四油口d进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第四油口d连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第二油缸510的活塞能够伸出。在这个过程中,液压泵200中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第一油口e以及第二电磁换向阀300的第二油口f,液压泵200中的液压油在流经第三管路830时,能够依次经过第三电磁换向阀b520的第一油口i以及第三电磁换向阀b520的第二油口j,最后进入到第二油缸510的无杆腔中。
75.当需要使高空作业平台下降时,则需使第二油缸510收缩。即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300以及第三电磁换向阀b520均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a进入到第一电磁换向阀100的第四油口d,再经过与第一电磁换向阀100的第四油口d连通的第四管路840进入到第二油缸510的有杆腔中,第二油缸510的无杆腔中的液压油能够依次经过第三管路830以及第一管路810,再经过与第一管路810第一电磁换向阀100的第三油口c进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第三油口c连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第二油缸510的活塞能够收缩。在这个过程中,第二油缸510的无杆腔中的液压油在流经第三管路830时,能够依次经过第三电磁换向阀b520的第二油口j以及第三电磁换向阀b520的第一油口i,第二油缸510的无杆腔中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第二油口f以及第二电磁换向阀300的第一油口e,最后进入到第一电磁换向阀100的第三油口c中。
76.参照图1至图3所示,可以理解的是,支腿液压控制系统还包括第五管路850以及第六管路860,第五管路850的一端与第三油缸610的无杆腔连通,第五管路850的另一端与第一管路810位于第二电磁换向阀300与第三电磁换向阀a420之间的管路连通,第三电磁换向阀c620设置于第五管路850上,第六管路860的一端与第三油缸610的有杆腔连通,第六管路860的另一端与第一电磁换向阀100的第四油口d连通;其中,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及第三电磁换向阀c620均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第一管路810以及第五管路850进入到第三油缸610的无杆腔内,第三油缸610的有杆腔内的液压油能够依次经过第六管路860、第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及第三电磁换向阀c620均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d以及第六管路860进入到第三油缸610的有杆腔内,第三油缸610的无杆腔内的液压油能够依次经过第五管路850、第一管路810、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
77.如此,当需要将高空作业平台举升时,则需使第三油缸610伸出。即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300以及第三电磁换向阀c620均得电,
则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第三油口c进入到与第一电磁换向阀100的第三油口c连通的第一管路810中,再经过与第一管路810连通的第五管路850进入到第三油缸610的无杆腔中,第三油缸610的有杆腔中的液压油能够先进入到第六管路860中,再经过与第六管路860连通的第一电磁换向阀100的第四油口d进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第四油口d连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第三油缸610的活塞能够伸出。在这个过程中,液压泵200中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第一油口e以及第二电磁换向阀300的第二油口f,液压泵200中的液压油在流经第五管路850时,能够依次经过第三电磁换向阀c620的第一油口k以及第三电磁换向阀c620的第二油口m,最后进入到第三油缸610的无杆腔中。
78.当需要使高空作业平台下降时,则需使第三油缸610收缩。即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300以及第三电磁换向阀c620均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a进入到第一电磁换向阀100的第四油口d,再经过与第一电磁换向阀100的第四油口d连通的第六管路860进入到第三油缸610的有杆腔中,第三油缸610的无杆腔中的液压油能够依次经过第五管路850以及第一管路810,再经过与第一管路810第一电磁换向阀100的第三油口c进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第三油口c连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第三油缸610的活塞能够收缩。在这个过程中,第三油缸610的无杆腔中的液压油在流经第五管路850时,能够依次经过第三电磁换向阀c620的第二油口m以及第三电磁换向阀c620的第一油口k,第三油缸610的无杆腔中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第二油口f以及第二电磁换向阀300的第一油口e,最后进入到第一电磁换向阀100的第三油口c中。
79.参照图1至图3所示,可以理解的是,支腿液压控制系统还包括第七管路870以及第八管路880,第七管路870的一端与第四油缸710的无杆腔连通,第七管路870的另一端与第一管路810位于第二电磁换向阀300与第三电磁换向阀a420之间的管路连通,第三电磁换向阀d720设置于第七管路870上,第八管路880的一端与第四油缸710的有杆腔连通,第八管路880的另一端与第一电磁换向阀100的第四油口d连通;其中,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及第三电磁换向阀d720均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第一管路810以及第七管路870进入到第四油缸710的无杆腔内,第四油缸710的有杆腔内的液压油能够依次经过第八管路880、第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及第三电磁换向阀d720均得电的情况下,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第四油口d以及第八管路880进入到第四油缸710的有杆腔内,第四油缸710的无杆腔内的液压油能够依次经过第七管路870、第一管路810、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
80.如此,当需要将高空作业平台举升时,则需使第四油缸710伸出。即可将第一电磁换向阀100切换至第一状态,并且使第二电磁换向阀300以及第三电磁换向阀d720均得电,
则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第三油口c进入到与第一电磁换向阀100的第三油口c连通的第一管路810中,再经过与第一管路810连通的第七管路870进入到第四油缸710的无杆腔中,第四油缸710的有杆腔中的液压油能够先进入到第八管路880中,再经过与第八管路880连通的第一电磁换向阀100的第四油口d进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第四油口d连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第四油缸710的活塞能够伸出。在这个过程中,液压泵200中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第一油口e以及第二电磁换向阀300的第二油口f,液压泵200中的液压油在流经第七管路870时,能够依次经过第三电磁换向阀d720的第一油口n以及第三电磁换向阀d720的第二油口p,最后进入到第四油缸710的无杆腔中。
81.当需要使高空作业平台下降时,则需使第四油缸710收缩。即可将第一电磁换向阀100切换至第二状态,并且使第二电磁换向阀300以及第三电磁换向阀d720均得电,则液压泵200中的液压油能够先经过第一电磁换向阀100的第一油口a进入到第一电磁换向阀100的第四油口d,再经过与第一电磁换向阀100的第四油口d连通的第八管路880进入到第四油缸710的有杆腔中,第四油缸710的无杆腔中的液压油能够依次经过第七管路870以及第一管路810,再经过与第一管路810连通的第一电磁换向阀100的第三油口c进入到第一电磁换向阀100中,最后经过与第一电磁换向阀100的第三油口c连通的第一电磁换向阀100的第二油口b进入到油箱210中,从而使得第四油缸710的活塞能够收缩。在这个过程中,第四油缸710的无杆腔中的液压油在流经第七管路870时,能够依次经过第三电磁换向阀d720的第二油口p以及第三电磁换向阀d720的第一油口n,第四油缸710的无杆腔中的液压油在流经第一管路810时,能够依次经过第二电磁换向阀300的第二油口f以及第二电磁换向阀300的第一油口e,最后进入到第一电磁换向阀100的第三油口c中。
82.参照图1以及图2所示,本发明一种实施例的支腿液压控制系统的控制方法,包括:在第一情况下:
83.s100,控制驱动源220得电,使驱动源220带动液压泵200输出液压油;控制第一电磁换向阀100得电,使第一电磁换向阀100切换至第一状态;控制第二电磁换向阀300得电,使第二电磁换向阀300的第一油口e与第二电磁换向阀300的第二油口f连通;控制每个油缸单元的第三电磁换向阀得电,使第三电磁换向阀的第一油口与第三电磁换向阀的第二油口连通,以使液压泵200中的液压油依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔内,并使每个油缸单元的油缸的有杆腔内的液压油依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中。
84.s200,控制驱动源220以及每个油缸单元的第三电磁换向阀失电,以使每个油缸单元的油缸被锁止。
85.s300,在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀300以及第一电磁换向阀100失电。
86.具体地,第一情况为每个油缸单元的油缸的活塞伸出的情况,即高空作业平台被
举升的情况。
87.进一步地,当按下操作键240,操作键240可以是手柄或按钮,将信号传递给控制器230,使控制器230控制第一电磁换向阀100的dt1得电时,第一电磁换向阀100切换至第一状态;当按下操作键240,将信号传递给控制器230,使控制器230控制第二电磁换向阀300的dt3得电时,第二电磁换向阀300的第一油口e与第二电磁换向阀300的第二油口f连通;当按下操作键240,将信号传递给控制器230,使控制器230控制每个油缸单元的第三电磁换向阀的dt4得电时,每个油缸单元的第三电磁换向阀的第一油口与每个油缸单元的第三电磁换向阀的第二油口连通。
88.更进一步地,在其中的一个实施例中,在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,即驱动源220以及每个油缸单元的第三电磁换向阀失电的1s至2s内,控制第二电磁换向阀300以及第一电磁换向阀100失电,除此之外,在其他的实施例中,可以根据不同的工况确定不同的预设时间。
89.需要说明的是,在每个油缸单元的油缸被锁止的情况下,管路检修口为图1以及图2中的v1口,v1口位于第二电磁换向阀300与每个油缸单元的第三电磁换向阀之间。
90.在上述的支腿液压控制系统的控制方法中,控制驱动源220得电,使驱动源220带动液压泵200输出液压油,控制第一电磁换向阀100得电,使第一电磁换向阀100切换至第一状态,控制第二电磁换向阀300以及每个油缸单元的第三电磁换向阀得电,则能使液压泵200中的液压油依次经过第一电磁换向阀100、第二电磁换向阀300以及每个油缸单元的第三电磁换向阀进入到每个油缸单元的油缸的无杆腔中,并且使每个油缸单元的油缸的有杆腔中的液压油经过第一电磁换向阀100进入到油箱210中。从而,在第一电磁换向阀100处于第一状态,且第二电磁换向阀300以及每个油缸单元的第三电磁换向阀均得电的情况下,每个油缸单元的油缸能够伸出,以此来实现对高空作业平台的举升。在这个过程中,液压泵200中的液压油依次经过第一电磁换向阀100的第一油口a、第一电磁换向阀100的第三油口c、第二电磁换向阀300的第一油口e、第二电磁换向阀300的第二油口f、每个油缸单元的第三电磁换向阀的第一油口以及每个油缸单元的第三电磁换向阀的第二油口进入到每个油缸单元的油缸的无杆腔中;每个油缸单元的油缸的有杆腔中的液压油能够依次经过第一电磁换向阀100的第四油口d以及第一电磁换向阀100的第二油口b进入到油箱210中。
91.当上述的高空作业平台被举升到预设高度时,控制驱动源220以及每个油缸单元的第三电磁换向阀失电,则能使驱动源220以及每个油缸单元的第三电磁换向阀切换至断开状态,即可将每个油缸单元的油缸锁止。
92.在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀300以及第一电磁换向阀100失电,即在驱动源220以及每个油缸单元的第三电磁换向阀失电的情况下,延时控制第二电磁换向阀300以及第一电磁换向阀100失电。如此,在驱动源220以及每个油缸单元的第三电磁换向阀失电的情况下,能够降低连接第二电磁换向阀300与每个油缸单元的第三电磁换向阀之间的管路中的液压油的压力,从而在对管路进行检修时能够避免管路中的液压油从管路中喷射至外界,以此来提高在对管路检修时的安全性。
93.参照图1以及图3所示,本发明一种实施例的支腿液压控制系统的控制方法,包括:在第二情况下:
94.h100,控制驱动源220得电,使驱动源220带动液压泵200输出液压油;控制第一电磁换向阀100得电,使第一电磁换向阀100切换至第二状态;控制第二电磁换向阀300得电,使第二电磁换向阀300的第一油口e与第二电磁换向阀300的第二油口f连通;控制每个油缸单元的第三电磁换向阀得电,使第三电磁换向阀的第一油口与第三电磁换向阀的第二油口连通,以使液压泵200中的液压油依次经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第四油口d进入到每个油缸单元的油缸的有杆腔中,并使每个油缸单元的油缸的无杆腔内的液压油依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
95.h200,控制驱动源220以及每个油缸单元的第三电磁换向阀失电,以使每个油缸单元的油缸被锁止。
96.h300,在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀300以及第一电磁换向阀100失电。
97.具体地,第二情况为每个油缸单元的油缸的活塞收缩的情况,即高空作业平台下降的情况。
98.进一步地,当按下操作键240,操作键240可以是手柄或按钮,将信号传递给控制器230,使控制器230控制第一电磁换向阀100的dt2得电时,第一电磁换向阀100切换至第二状态;当按下操作键240,将信号传递给控制器230,使控制器230控制第二电磁换向阀300的dt3得电时,第二电磁换向阀300的第一油口e与第二电磁换向阀300的第二油口f连通;当按下操作键240,将信号传递给控制器230,使控制器230控制每个油缸单元的第三电磁换向阀的dt4得电时,每个油缸单元的第三电磁换向阀的第一油口与每个油缸单元的第三电磁换向阀的第二油口连通。
99.更进一步地,在其中的一个实施例中,在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,即驱动源220以及每个油缸单元的第三电磁换向阀失电的1s至2s内,控制第二电磁换向阀300以及第一电磁换向阀100失电,除此之外,在其他的实施例中,可以根据不同的工况确定不同的预设时间。
100.需要说明的是,在每个油缸单元的油缸被锁止的情况下,管路检修口为图1以及图3中的v2口,v2口位于第一电磁换向阀100与每个油缸单元的油缸的有杆腔之间。
101.在上述的支腿液压控制系统的控制方法中,控制驱动源220得电,使驱动源220带动液压泵200输出液压油,控制第一电磁换向阀100得电,使第一电磁换向阀100切换至第二状态,控制第二电磁换向阀300以及每个油缸单元的第三电磁换向阀得电,则能使液压泵200中的液压油经过第一电磁换向阀100进入到每个油缸单元的油缸的有杆腔中,并且使每个油缸单元的油缸的无杆腔中的液压油依次经过每个油缸单元的第三电磁换向阀、第二电磁换向阀300以及第一电磁换向阀100进入到油箱210中。从而,在第一电磁换向阀100处于第二状态,且第二电磁换向阀300以及每个油缸单元的第三电磁换向阀均得电的情况下,每个油缸单元的油缸能够收缩,以此来实现高空作业平台的下降。在这个过程中,液压泵200中的液压油能够依次经过第一电磁换向阀100的第一油口a以及第一电磁换向阀100的第四油口d进入到每个油缸单元的油缸的有杆腔中;每个油缸单元的油缸的无杆腔中的液压油
缸能够依次经过每个油缸单元的第三电磁换向阀的第二油口、每个油缸单元的第三电磁换向阀的第一油口、第二电磁换向阀300的第二油口f、第二电磁换向阀300的第一油口e、第一电磁换向阀100的第三油口c以及第一电磁换向阀100的第二油口b进入到油箱210中。
102.当上述的高空作业平台下降到预设高度时,控制驱动源220以及每个油缸单元的第三电磁换向阀失电,则能使驱动源220以及每个油缸单元的第三电磁换向阀切换至断开状态,即可将每个油缸单元的油缸锁止。
103.在驱动源220以及每个油缸单元的第三电磁换向阀失电的预设时间内,控制第二电磁换向阀300以及第一电磁换向阀100失电,即在驱动源220以及每个油缸单元的第三电磁换向阀失电的情况下,延时控制第二电磁换向阀300以及第一电磁换向阀100失电。如此,在驱动源220以及每个油缸单元的第三电磁换向阀失电的情况下,能够降低连接第一电磁换向阀100与每个油缸单元的有杆腔之间的管路中的液压油的压力,从而在对管路进行检修时能够避免管路中的液压油从管路中喷射至外界,以此来提高在对管路检修时的安全性。
104.另外,在高空作业平台启动下降时,即每个油缸单元的油缸的活塞启动收缩时,第二电磁换向阀300、每个油缸单元的第三电磁换向阀以及第一电磁换向阀100得电之后不会由于液压油的压力的突变而快速切换通断状态,则每个油缸单元的油缸的活塞启动收缩时,能够避免油缸发出啸叫异响,并且能够避免油缸发生高频抖动,以此来提高支腿油缸在运动过程中的平稳性。
105.本发明一种实施例的高空作业平台,包括:如上所述的支腿液压控制系统;或者应用了如上所述的支腿液压控制系统的控制方法。
106.在上述的高空作业平台中,在高空作业平台启动下降时,由于上述的支腿液压控制系统能够提高支腿油缸在运动过程中的平稳性,则上述的高空作业平台在升降的过程中具有较好的平稳性。且由于上述的支腿液压控制系统能够对每个油缸单元的油缸实现锁止,因此,上述的高空作业平台在预设高度进行工作时具有较好的安全性。
107.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1