一种水平定向钻机半自动抓手调平控制系统的制作方法
1.本实用新型属于水平定向钻机控制系统技术领域,具体涉及一种水平定向钻机半自动抓手调平控制系统。
背景技术:
2.在水平定向钻机施工过程中,钻架与地面需保持一定倾斜角度,半自动抓手与钻架齐平,半自动抓手外翻后相对地面倾斜,导致工人不便抬放钻杆,影响施工效率。同时因为抓手倾斜,钻杆放置后,易向下滑动,影响钻杆定位,并对工人安全造成隐患。
技术实现要素:
3.为解决现有技术的不足,本实用新型提供一种水平定向钻机半自动抓手调平控制系统,能够对抓手进行调平,解决上钻杆时半自动抓手倾斜造成抬放钻杆困难,施工效率低的问题。
4.为解决现有技术的不足,本实用新型提供的技术方案为:
5.一种水平定向钻机半自动抓手调平控制系统,包括抓手翻转开关、抓手调平开关、抓手抓握开关、主泵、半自动抓手阀组、抓手翻转马达、抓手调平油缸、抓手抓握油缸ⅰ和抓手抓握油缸ⅱ;
6.所述半自动抓手阀组包括抓手翻转电磁阀y02a、抓手翻转电磁阀y02b、抓手调平电磁阀y03a、抓手调平电磁阀y03b、抓手抓握电磁阀y04a和抓手抓握电磁阀y04b;
7.所述抓手翻转电磁阀y02a、抓手翻转电磁阀y02b均与所述抓手翻转开关电连接;所述抓手调平电磁阀y03a、抓手调平电磁阀y03b均与所述抓手调平开关电连接;所述抓手抓握电磁阀y04a、抓手抓握电磁阀y04b均与所述抓手抓握开关电连接;
8.所述主泵出油口b与半自动抓手阀组的p1口连通;
9.所述半自动抓手阀组的t1口与液压油箱连通;半自动抓手阀组的出油口a1、b1分别与所述抓手翻转马达的a4、b4口连通,半自动抓手阀组的出油口a2、b2分别与所述抓手调平油缸的a5、b5口连通,半自动抓手阀组的出油口a3与所述抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的a6口连通,半自动抓手阀组的出油口b3与所述抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的b6口连通。
10.优选的,还包括安全阀;所述主泵出油口b与安全阀的p口通过管路连通;所述安全阀的t口与液压油箱连通。
11.优选的,还包括散热器和滤油器;
12.所述半自动抓手阀组的t1口、所述安全阀的t口流出的液压油通过所述散热器、所述滤油器流回液压油箱。
13.优选的,所述抓手翻转开关、抓手调平开关、抓手抓握开关为三位自复位开关。
14.优选的,所述抓手翻转电磁阀y02a、抓手翻转电磁阀y02b、抓手调平电磁阀y03a、抓手调平电磁阀y03b、抓手抓握电磁阀y04a和抓手抓握电磁阀y04b均为三位四通电磁换向
阀。
15.优选的,所述半自动抓手阀组还包括卸荷电磁阀y01;所述卸荷电磁阀y01与所述抓手翻转开关、抓手调平开关和抓手抓握开关均电连接;卸荷电磁阀y01的进油口与所述主泵的出油口b连通,出油口与液压油箱连通。
16.优选的,所述半自动抓手阀组的出口a1、b1通过软管分别与所述抓手翻转马达的a4、b4口连通。
17.优选的,所述半自动抓手阀组的出口a2、b2通过软管分别与所述抓手调平油缸的a5、b5口连通。
18.优选的,所述半自动抓手阀组的出油口a3与通过软管所述抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的a6口连通;半自动抓手阀组的出油口b3通过软管与所述抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的b6口连通。
19.优选的,所述半自动抓手阀组还包括平衡阀;所述平衡阀的四个油口分别与所述抓手翻转电磁阀y02a的出油口、所述抓手翻转电磁阀y02b的出油口、所述抓手翻转马达的a4、b4口连通。
20.本实用新型的有益效果:
21.本实用新型提供的水平定向钻机半自动抓手调平控制系统,结构简单,在半自动抓手外翻后,通过抓手调平开关将半自动抓手调整到水平位置,便于人工放置钻杆,大大降低安放钻杆的难度,同时可以防止钻杆滑动,保护人员安全;钻杆放置完成后,又可将半自动抓手调整到与钻架平行的位置,通过抓手装卸钻杆,可靠实用。
附图说明
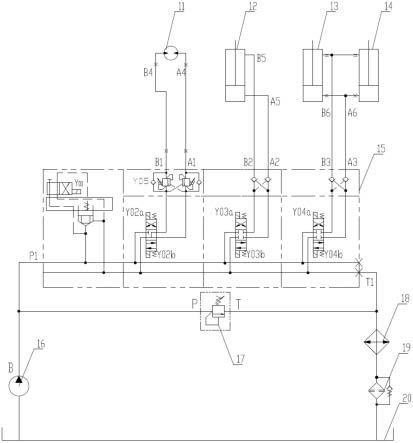
22.图1为本实用新型提供的水平定向钻机半自动抓手调平控制系统的液压原理图;
23.图2为本实用新型提供的水平定向钻机半自动抓手调平控制系统的电气连接示意图;
24.其中:1、抓手翻转开关,2、抓手调平开关,3、抓手抓握开关,4、卸荷电磁阀y01,5、抓手翻转电磁阀y02b,6、抓手翻转电磁阀y02a,7、抓手调平电磁阀y03b,8、抓手调平电磁阀y03a,9、抓手抓握电磁阀y04b,10、抓手抓握电磁阀y04a,11、抓手翻转马达,12、抓手调平油缸,13、抓手抓握油缸ⅰ,14、抓手抓握油缸ⅱ,15、半自动抓手阀组,16、主泵,17、安全阀,18、散热器,19、滤油器,20、液压油箱。
具体实施方式
25.下面结合实施方式对本实用新型作进一步描述。以下实施方式仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
26.本实用新型实施例提供一种水平定向钻机半自动抓手调平控制系统,参见图1及图2,包括抓手翻转开关1、抓手调平开关2、抓手抓握开关3、主泵16、半自动抓手阀组15、抓手翻转马达11、抓手调平油缸12、抓手抓握油缸ⅰ13和抓手抓握油缸ⅱ14。抓手抓握油缸ⅰ13与抓手抓握油缸ⅱ14并联。半自动抓手阀组15包括抓手翻转电磁阀y02a、抓手翻转电磁阀y02b、抓手调平电磁阀y03a、抓手调平电磁阀y03b、抓手抓握电磁阀y04a和抓手抓握电磁阀y04b;抓手翻转电磁阀y02a 6、抓手翻转电磁阀y02b 5均与抓手翻转开关电1电连接;抓手
调平电磁阀y03a 8、抓手调平电磁阀y03b7均与抓手调平开关2电连接;抓手抓握电磁阀y04a 10、抓手抓握电磁阀y04b 9均与抓手抓握开关3电连接。主泵16出油口b与半自动抓手阀组15的p1口连通;半自动抓手阀组15的t1口与液压油箱20连通;半自动抓手阀组15的出油口a1、b1分别与抓手翻转马达11的a4、b4口连通,半自动抓手阀组15的出油口a2、b2分别与抓手调平油缸12的a5、b5口连通,半自动抓手阀组15的出油口a3与抓手抓握油缸ⅰ13、抓手抓握油缸ⅱ14的a6口连通,半自动抓手阀组15的出油口b3与抓手抓握油缸ⅰ13、抓手抓握油缸ⅱ14的b6口连通。
27.在本实用新型的可选实施例中,参见图1,水平定向钻机半自动抓手调平控制系统还包括安全阀17;主泵16出油口b与安全阀17的p口通过管路连通,安全阀的t口与液压油箱连通。
28.在本实用新型的可选实施例中,参见图1,水平定向钻机半自动抓手调平控制系统还包括散热器18和滤油器19;半自动抓手阀组15的t1口、安全阀17的t口流出的液压油通过散热器18、滤油器19流回液压油箱20。
29.在本实用新型的可选实施例中,抓手翻转开关、抓手调平开关、抓手抓握开关为三位自复位开关。
30.在本实用新型的可选实施例中,抓手翻转电磁阀y02a、抓手翻转电磁阀y02b、抓手调平电磁阀y03a、抓手调平电磁阀y03b、抓手抓握电磁阀y04a和抓手抓握电磁阀y04b均为为三位四通电磁换向阀。
31.在本实用新型的可选实施例中,参见图1及图2,半自动抓手阀组15还包括卸荷电磁阀y01;卸荷电磁阀y01 4与抓手翻转开关1、抓手调平开关2和抓手抓握开关3均电连接,卸荷电磁阀y01的进油口与主泵16的出油口b连通,出油口通过散热器18、滤油器19与液压油箱20连通。当卸荷电磁阀y01线圈不通电时,水平定向钻机半自动抓手调平控制系统的液压油均会从卸荷电磁阀y01流回液压油箱。
32.在本实用新型的可选实施例中,参见图1,半自动抓手阀组15的出口a1、b1通过软管分别与抓手翻转马达11的a4、b4口连通。
33.在本实用新型的可选实施例中,参见图1,半自动抓手阀组15的出口a2、b2通过软管分别与抓手调平油缸12的a5、b5口连通。
34.在本实用新型的可选实施例中,参见图1,半自动抓手阀组15的出口a3通过软管与抓手抓握油缸ⅰ13、抓手抓握油缸ⅱ14的a6口连通;半自动抓手阀组15的出油口b3通过软管与抓手抓握油缸ⅰ13、抓手抓握油缸ⅱ14的b6口连通。
35.在本实用新型的可选实施例中,参见图1,半自动抓手阀组15还包括平衡阀y05;平衡阀y05的四个油口分别与抓手翻转电磁阀y02a的出油口、抓手翻转电磁阀y02b的出油口、抓手翻转马达的a4、b4口连通,使抓手翻转马达的a4、b4口保持一定压力,抓手翻转马达匀速翻转。
36.当操作抓手外翻动作时,抓手翻转马达控制电磁阀y02b得电,主泵出油口b流出的液压油经半自动抓手阀组的b1口进入抓手翻转马达的b4口;当操作抓手内翻动作时,抓手翻转马达控制电磁阀y02a得电,主泵出油口b流出的液压油经半自动抓手阀组a1口进入抓手翻转马达a4口。
37.当操作抓手调平动作时,抓手调平油缸控制电磁阀y03b得电,主泵出油口b流出的
液压油经半自动抓手阀组的b2口进入抓手调平油缸的b5口,当操作抓手调平复位动作时,抓手调平油缸控制电磁阀y03a得电,主泵出油口b流出的液压油经半自动抓手阀组a2口进入抓手调平油缸a5口。
38.当操作抓手抓握动作时,抓手抓握油缸控制电磁阀y04a得电,主泵出油口b流出的液压油经半自动抓手阀组a3口进入抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的a6口;当操作抓手松开动作时,抓手抓握油缸控制电磁阀y04b得电,主泵出油口b流出的液压油经半自动抓手阀组b3口进入抓手抓握油缸ⅰ、抓手抓握油缸ⅱ的b6口。
39.在本实用新型的可选实施例中,水平定向钻机半自动抓手调平控制系统的电源为24v直流电源。
40.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1