一种基于数字孪生的油缸绑定方法、系统、装置及介质与流程
本发明涉及一种基于数字孪生的油缸绑定方法、系统、装置及介质,属于数字孪生。
背景技术:
1、油缸是将液压能转变为机械能的、做直线往复运动或摆动运动的液压执行元件。它结构简单、工作可靠,用它来实现往复运动时,可免去减速装置,并且没有传动间隙,运动平稳,因此在各种机械的液压系统中得到广泛应用。
2、在数字孪生领域中,机械油缸的绑定是常遇到的问题,在现有的制作过程成中,其操作方式是通过手动添加控制器并手动核对控制位置的方式绑定一步一步制作,费时费力还容易出错,且不容易形成插件。
技术实现思路
1、为了解决上述问题,本发明公开了一种基于数字孪生的油缸绑定方法、系统、装置及介质。
2、本发明解决其技术问题采取的技术方案如下:
3、第一方面,本发明提供一种基于数字孪生的油缸绑定方法,包括以下步骤:
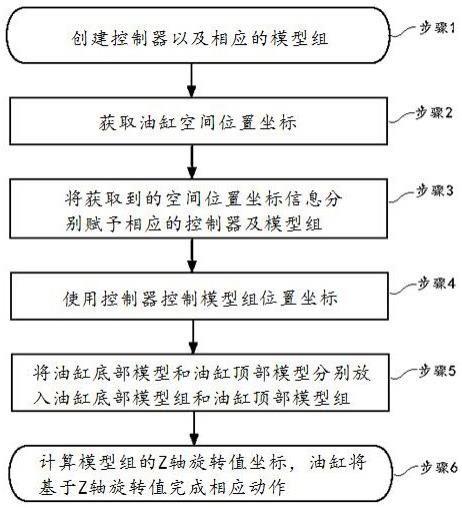
4、步骤1:创建控制器以及相应的模型组;
5、步骤2:获取油缸空间位置坐标;
6、步骤2-1:选中油缸顶部旋转轴模型,创建簇点c_up以获取油缸顶部旋转中心点的空间位置坐标信息;
7、步骤2-2:选中油缸底部旋转轴模型,创建簇点c_down以获取油缸底部旋转中心点的空间位置坐标信息;
8、步骤2-3:创建一个定位器loc_up,用以修正步骤2-1所获取的油缸顶部旋转中心点的空间位置坐标信息;
9、步骤3:将步骤2获取到的空间位置坐标信息分别赋予相应的控制器及模型组;
10、步骤3-1:通过簇点c_up与定位器loc_up做父子约束并删除,使得定位器loc_up获取到簇点c_up的空间位置坐标信息;
11、根据油缸的方向,将定位器loc_up的一个轴向的点坐标修正到与簇点c_down一致;
12、步骤3-2:通过簇点c_down与空组group_a做父子约束并删除,使得空组group_a获取到簇点c_down的空间位置坐标信息;
13、步骤3-3:通过定位器loc_up分别与油缸顶部控制器con_up及油缸顶部模型组yougang_up_mo_grp做父子约束并删除,使得油缸顶部控制器con_up及油缸顶部模型组yougang_up_mo_grp获取到定位器loc_up的空间位置坐标信息;
14、至此,获取到基于油缸底部旋转中心点为原点的控制器及模型组的新的空间位置坐标关系;
15、步骤4:使用控制器控制相应模型组的位置坐标;
16、步骤5:将油缸底部模型放入油缸底部模型组yougang_mo_down_grp,将油缸顶部模型放入油缸顶部模型组yougang_mo_up_grp;
17、步骤6:计算模型组yougang_mo_grp的z轴旋转值坐标,油缸将基于所获得的z轴旋转值完成相应动作。
18、进一步地,所述步骤1的具体步骤为:在三维空间中创建一个空组group_a,在所述空组group_a内分别创建用以控制油缸顶部模型位移的油缸顶部控制器con_up、用以控制油缸底部模型位移的油缸底部控制器con_down和用以存放油缸整体模型的模型组yougang_mo_grp;
19、在所述模型组yougang_mo_grp内分别创建用以存放油缸顶部模型的油缸顶部模型组yougang_up_mo_grp和用以存放油缸底部模型的油缸底部模型组yougang_down_mo_grp。
20、进一步地,所述步骤4的具体步骤包括:
21、步骤4-1:通过点约束使油缸顶部控制器con_up控制油缸顶部模型组yougang_up_mo_grp;
22、步骤4-2:将模型组yougang_mo_grp在x、y、z方向上的位移设置为与油缸底部控制器con_down相同,以使油缸底部控制器con_down能够控制模型组yougang_mo_grp,具体计算公式为:
23、yougang_mo_grp.translatex=con_down.translatex;
24、yougang_mo_grp.translatey=con_down.translatey;
25、yougang_mo_grp.translatez=con_down.translatez;
26、式中,con down为油缸底部控制器con down,translatex表示在x方向上的位移量,translatey表示在y方向上的位移量,translatez表示在z方向上的位移量。
27、进一步地,所述步骤6中模型组yougang_mo_grp的z轴旋转值算式为:
28、yougang_mo_grp.rotatez=-atan2d((con_up.translatex-con_down.translatex),(con_up.translatey-con_down.translatey));
29、式中,con up和con down分别代表顶部控制器con_up和底部控制器con_down;translatex表示在x方向上的位移量,translatey表示在y方向上的位移量。
30、第二方面,本发明提供一种基于数字孪生的油缸绑定系统,所述系统包括:
31、控制器及模型组创建模块,用以在三维空间中创建控制器及模型组;
32、坐标获取模块,用以获取油缸空间位置坐标;
33、坐标赋值模块,用以将坐标获取模块所获取的空间位置坐标信息分别赋予相应的控制器及模型组;
34、控制模块,用以使用控制器控制相应模型组的位置坐标;
35、模型放置模块,用以将油缸底部模型和油缸顶部模型分别放入油缸底部模型组yougang_mo_down_grp和油缸顶部模型组yougang_mo_up_grp;
36、动作执行模块,用以获取模型组yougang_mo_grp的z轴旋转值坐标,并使油缸基于所获得的z轴旋转值完成相应动作;
37、其中的坐标获取模块,进一步用于:
38、选中油缸顶部旋转轴模型,创建簇点c_up以获取油缸顶部旋转中心点的空间位置坐标信息;
39、选中油缸底部旋转轴模型,创建簇点c_down以获取油缸底部旋转中心点的空间位置坐标信息;
40、创建一个定位器loc_up,用以修正所获取到的油缸顶部旋转中心点的空间位置坐标信息;
41、其中的坐标赋值模块,进一步用于:
42、通过簇点c_up与定位器loc_up做父子约束并删除,使得定位器loc_up获取到簇点c_up的空间位置坐标信息;
43、通过确定油缸的方向将定位器loc_up的一个轴向的点坐标修正到与簇点c_down一致;
44、通过簇点c_down与空组group_a做父子约束并删除,使得空组group_a获取到簇点c_down的空间位置坐标信息;
45、通过定位器loc_up分别与油缸顶部控制器con_up及油缸顶部模型组yougang_up_mo_grp做父子约束并删除,使得油缸顶部控制器con_up及油缸顶部模型组yougang_up_mo_grp获取到定位器loc_up的空间位置坐标信息;
46、至此,获取到基于油缸底部旋转中心点为原点的控制器及模型组的新的空间位置坐标关系。
47、所述的控制器及模型组创建模块,进一步用于:
48、在三维空间中创建一个空组group_a,在所述空组group_a内分别创建用以控制油缸顶部模型位移的油缸顶部控制器con_up、用以控制油缸底部模型位移的油缸底部控制器con_down和用以存放油缸整体模型的模型组yougang_mo_grp;
49、在所述模型组yougang_mo_grp内分别创建用以存放油缸顶部模型的油缸顶部模型组yougang_up_mo_grp和用以存放油缸底部模型的油缸底部模型组yougang_down_mo_grp。
50、所述的控制模块,进一步用于:
51、通过点约束使油缸顶部控制器con_up控制油缸顶部模型组yougang_up_mo_grp;
52、将模型组yougang_mo_grp在x、y、z方向上的位移设置为与油缸底部控制器con_down相同,以使油缸底部控制器con_down能够控制模型组yougang_mo_grp,具体计算公式为:
53、yougang_mo_grp.translatex=con_down.translatex;
54、yougang_mo_grp.translatey=con_down.translatey;
55、yougang_mo_grp.translatez=con_down.translatez;
56、式中,con down为油缸底部控制器con down,translatex表示在x方向上的位移量,translatey表示在y方向上的位移量,translatez表示在z方向上的位移量。
57、所述的动作执行模块,进一步用于:
58、计算模型组yougang_mo_grp的z轴旋转值坐标,算式为:
59、yougang_mo_grp.rotatez=-atan2d((con_up.translatex-con_down.translatex),(con_up.translatey-con_down.translatey));
60、式中,con up和con down分别代表顶部控制器con_up和底部控制器con_down;translatex表示在x方向上的位移量,translatey表示在y方向上的位移量。
61、第三方面,本发明还提供一种基于数字孪生的油缸绑定装置,所述装置包括:
62、存储器,用以存储计算机程序;
63、处理器,用以执行所述计算机程序时实现如上所述基于数字孪生的油缸绑定方法的步骤。
64、第四方面,本发明还提供一种计算机可读储存介质,所述计算机可读储存介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述基于数字孪生的油缸绑定方法的步骤。
65、本发明的有益效果如下:
66、本发明根据油缸的运动规律,结合控制器、模型组、簇点操作及相关的数学运算实现了油缸在三维空间的运动,实现过程准确可靠且高效,使用以上方法形成绑定插件,通过绑定插件即使不懂绑定的模型制作人员也能够通过最简单的操作实现油缸的快速绑定。本发明有助于制作人员在数字孪生中快速完成油缸的绑定动画工作。同时还可以将此方法的运算方法复刻到其它软件中,实现油缸的快速绑定及动画工作。
- 还没有人留言评论。精彩留言会获得点赞!