基于双SOGI的直线压缩机无传感器谐振频率控制方法及系统
本发明属于直线压缩机谐振频率跟踪控制,更具体地,涉及一种基于双sogi(二阶广义积分器)的直线压缩机无传感器谐振频率控制方法。
背景技术:
1、直线压缩机是一种将电磁力直接转化为直线运动的新型压缩机,在低温制冷、气化液化等领域有着广阔的用于前景。相比于传统旋转电机驱动的压缩机系统,由直线压缩机取消了曲柄连杆装置,具有结构简单、噪音低、行程可调等优点。
2、直线压缩机具有谐振频率点,当系统以谐振频率工作时,可以获得最大输出效率。由于直线压缩机工作在系统谐振点时,活塞行程与电流之间的相位差正好为90°。根据这一特性,有学者通过控制电机反电势与绕组电流的相位差的方法,实现频率跟踪。然而,该方法在相角检测时存在过零检测带来的误差问题。为有效避开相角检测中过零点检测带来的检测误差,同时降低采样中周期误差干扰,有学者通过控制活塞行程与电流乘积的平均值为零,实现压缩机谐振频率跟踪控制。但由于控制过程中,频率不断改变,定积分求平均值的计算极其困难,该方法存在振荡严重,计算量大等问题。
3、根据已有谐振频率跟踪控制方法可知,活塞行程信号在跟踪系统谐振频率时是非常重要的。此外,由于直线压缩机的活塞行程是不受限的,当电压过大时,活塞行程可能会超过最大允许范围,导致活塞撞缸问题,因此需要对活塞行程进行闭环控制。采用位置传感器可以获得精确的活塞行程信号,但该方法存在传感器安装维护困难、成本高、系统体积增大等问题,因此学者们对直线压缩机无位置传感器控制展开了研究。当前采用最多的方法是根据电压方程直接计算电机反电动势,然后根据反电动势与活塞速度成正比的关系,计算活塞速度信号。最后对活塞速度信号进行积分获得活塞行程信号。然而,该方法是一种开环计算方法,其估算精度易受电机参数的影响,估算精度有待提高。综上,现有谐振频率跟踪方法严重依赖活塞行程信号,存在振荡严重,跟踪精度低等问题,且无位置传感器方法参数鲁棒性差,行程观测精度有待提高。
技术实现思路
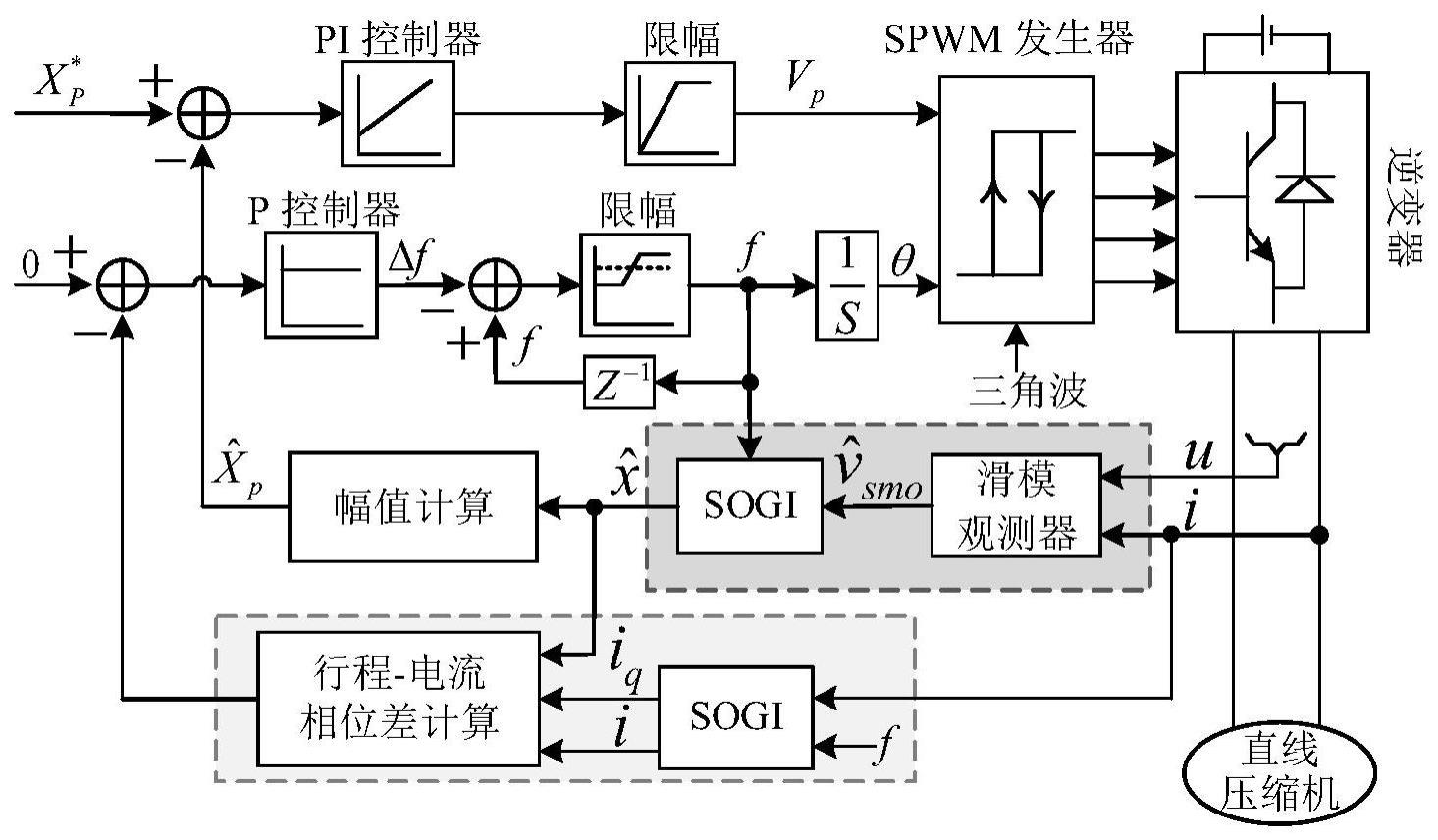
1、针对现有技术的缺陷和改进需求,本发明提供了一种基于双sogi的直线压缩机无传感器谐振频率控制方法及系统,其目的在于提高谐振频率估算精度,同时实现谐振频率跟踪与无位置传感器活塞行程闭环控制。
2、为实现上述目的,本发明一方面提供了一种基于双sogi的直线压缩机无传感器谐振频率控制方法,包括以下步骤:
3、s1.采用sogi对直线压缩机电流信号进行正交化处理,得到电流正交信号;
4、s2.将直线压缩机活塞行程信号分别与电流信号以及电流正交信号进行乘积计算,并对其分别进行滤波,获得两组直流分量;
5、s3.对两组直流分量进行比值计算,获得行程电流相位差的余切值;采用p控制器将余切值调整为0,保证此时活塞行程和电流信号的相位差为90°;将调整过程中的频率变化量累加到电机原有运行频率,即可实现系统谐振频率跟踪控制;
6、s4.基于电机电压方程,设计滑模观测器观测电机反电动势信号;
7、s5.根据滑模观测器观测的反电动势信号获得活塞速度信号,并采用sogi对活塞信号进行滤波并积分,获得估算的活塞行程信号;
8、s6.将估算的活塞行程信号用于谐振频率跟踪方法的乘积计算及活塞行程闭环控制,从而实现无位置传感器谐振频率跟踪控制。
9、进一步地,步骤s1所述的方法包括:
10、所用sogi的传递函数为:
11、
12、
13、其中gd(a)为前向传递函数,gq(a)为正交传递函数,a为传递函数的独立变量,υ为输入信号,υ′为滤波后的输出信号,υ′q为滤波输出信号的正交信号,κ为滤波常数,ωc为中心频率。
14、进一步地,直线压缩机电流信号表达式为:
15、i(t)=ip sin(ωt+θ)
16、进一步地,经sogi正交化处理后的电流正交信号表达式为:
17、i(t)=-ip cos(ωt+θ)
18、其中,ip为电流峰值。
19、进一步地,步骤s2所述的方法包括:
20、活塞行程信号的表达式为:
21、x(t)=xp sin(ωt)
22、活塞行程信号与电流信号的乘积计算为:
23、
24、活塞行程信号与电流正交信号的乘积计算为:
25、
26、采用的二阶低通滤波器的传递函数为:
27、
28、其中,ωh为截止滤波,ξ为滤波常数。
29、进一步地,通过二阶低通滤波器对行程-电流计行程-电流正交信号分别进行滤波,得到的两组直流分量为:
30、
31、
32、其中,slpf为低通滤波器的缩写。
33、进一步地,步骤s3所述的方法包括:
34、对二阶低通滤波器滤波后的直流分量进行比值,得到的行程电流相位差的余切值为:
35、
36、进一步地,采用p控制器将余切值调整为0,可以确保活塞行程与电流信号相位差为90°。将p控制器控制的频率变化量累加到电机原有运行频率,能够获得系统谐振频率,实现谐振频率跟踪控制。
37、进一步地,步骤s4所述的方法包括:
38、直线压缩机的电压方程为:
39、
40、其中,r为电阻,l为电感,u为输出电压,i为采样电流,e为电机反电动势。
41、进一步地,将电压方程改写为电流状态方程:
42、
43、进一步地,根据电流状态方程设计滑模观测器为:
44、
45、其中,为观测电流,k为切换增益,sat(·)为饱和函数,为观测电流。
46、进一步地,步骤s5所述的方法包括:
47、采用滑模观测器获得的反电动势信息为:
48、
49、其中,为观测的反电动势。
50、进一步地,根据电机反电动势与速度之间的关系,得到估算的活塞速度信号为:
51、
52、进一步地,采用sogi对估算的速度信号滤波并积分,可获得活塞行程估算信号
53、进一步地,步骤s6中采用滑模观测器及sogi获得的行程估算信号不仅用于谐振频率跟踪方法的乘积计算,还用于活塞行程闭环控制。因此,本文所提方法可实现直线压缩机无传感器谐振频率跟踪控制。
54、本发明还提供了一种基于双sogi的直线压缩机无传感器谐振频率控制系统,包括:计算机可读存储介质和处理器;
55、所述计算机可读存储介质用于存储可执行指令;
56、所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行上述的基于双sogi的直线压缩机无传感器谐振频率控制方法。
57、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有下列有益效果:
58、(1)本发明提供的直线压缩机谐振频率跟踪控制方法与现有方法相比,其中采用的基于饱和函数的滑模观测器具有较强的参数鲁棒性,可大幅提高行程估算精度,所提出的双sogi谐振频率跟踪方法不受活塞行程变化的影响,显著提高了算法的抗干扰能力。
59、(2)相比于传统开环反电动势积分法,采用滑模观测器观测活塞行程信号,大大提高了算法的参数鲁棒性,行程估算精度高。
60、(3)采用双sogi结构,其中一个sogi用于谐振频率跟踪方法中以产生电流正交信号,另一个sogi用于滑模观测器代替纯积分器,以活塞精确的活塞行程信号。
61、(4)将滑模观测器与谐振频率跟踪方法相结合,可实现高性能直线压缩机无位置传感器谐振频率跟踪控制。
- 还没有人留言评论。精彩留言会获得点赞!