压气机的喘振诊断和抑制方法、装置与流程
本发明涉及热工自动控制领域,具体涉及一种压气机的喘振诊断和抑制方法、一种压气机的喘振诊断和抑制装置。
背景技术:
1、目前,以天然气为燃料的燃气轮机发电成为电力供应的重要技术,而压气机是燃气轮机系统中的重要组成构建,随着燃气-蒸汽联合循环发电机组的广泛使用,对压气机的运行特性和控制研究越来越多。受现场运行条件的限制,压气机无法经常进行离线扰动实验,为获得压气机动态运行特性,开展在线辨识成为设计控制系统的重要技术手段。此外,压气机在工作时容易出现不稳定的工作状态,即压气机容易进入到旋转失速和喘振状态。当压气机进入到旋转失速和喘振状态时,燃气轮机组会出现不稳定的振动,极大的影响机组的运行安全。
2、目前,针对压气机的喘振模型提出的一种对旋转失速和喘振的非线性反馈控制策略,控制策略简单,无法对压气机的喘振状态进行快速诊断和控制,使压气机难以迅速回归正常工作状态,影响压气机的稳定运行。
技术实现思路
1、本发明为解决上述技术问题,提供了一种压气机的喘振诊断和抑制方法、装置,能够精准诊断压气机的喘振状态,并能够对压气机的喘振进行有效抑制,有利于压气机的稳定运行。
2、本发明采用的技术方案如下:
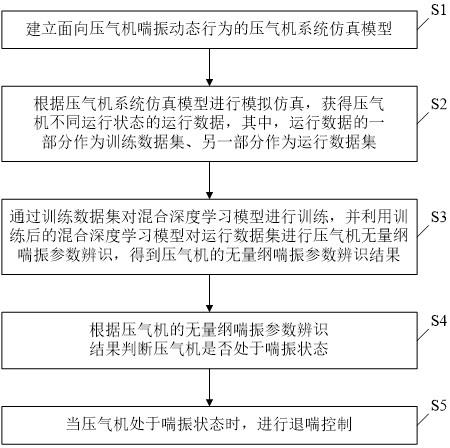
3、一种压气机的喘振诊断和抑制方法,包括以下步骤:建立面向压气机喘振动态行为的压气机系统仿真模型;根据所述压气机系统仿真模型进行模拟仿真,获得所述压气机不同运行状态的运行数据,其中,所述运行数据的一部分作为训练数据集、另一部分作为运行数据集;通过所述训练数据集对混合深度学习模型进行训练,并利用训练后的混合深度学习模型对所述运行数据集进行压气机无量纲喘振参数辨识,得到所述压气机的无量纲喘振参数辨识结果;根据所述压气机的无量纲喘振参数辨识结果判断所述压气机是否处于喘振状态;当所述压气机处于喘振状态时,进行退喘控制。
4、另外,根据本发明提出的压气机的喘振诊断和抑制方法还可以具有如下附加的技术特征:
5、根据本发明的一个实施例,所述运行数据包括所述压气机的进气压力、进气流量、出口压力、出口流量、出口压升系数、出口流量系数和无量纲喘振参数。
6、根据本发明的一个实施例,所述混合深度学习模型包含两层结构,第一层结构为长短期记忆神经网络lstm(long short-term memory),第二层结构为高斯过程回归gpr(gaussian process regression)。
7、根据本发明的一个实施例,通过所述训练数据集对混合深度学习模型进行训练,并利用训练后的混合深度学习模型对所述运行数据集进行压气机无量纲喘振参数辨识,具体包括:将所述训练数据集中的所述出口压升系数和所述出口流量系数作为输入变量、所述训练数据集中的所述无量纲喘振参数作为输出变量,并对所述输入变量和所述输出变量进行归一化处理;利用归一化后的训练数据集对所述混合深度学习模型进行训练;将所述运行数据集中所述压气机的进出口压力和流量输入到训练后的混合深度学习模型的长短期记忆神经网络lstm,输出所述运行数据集的无量纲喘振参数的第一次估计值,并将所述第一次估计值输入训练后的高斯过程回归gpr,输出无量纲喘振参数的第二次估计值,以及将所述第二估计值作为所述压气机的无量纲喘振参数辨识的辨识结果。
8、根据本发明的一个实施例,采用基于扰动实时观测的主动控制系统,使用eso(extended state observer,扩张状态观测器)对所述压气机喘振的扰动实时观测的主动控制系统的总扰动进行估计,通过反馈控制来消除,以达到抗扰的目的,令所述压气机的出口流量和压力趋于稳定,以实现脱喘控制,其中,进行扰动实时观测的扰动实时观测器的具体形式为:
9、
10、其中,是状态观测器的观测增益,是设计的输入增益,和被用于反馈控制设计,观测状态是误差估计的总和,为输入控制量,y为被控系统的输出;所述扰动实时观测的主动控制系统的表达式为:
11、
12、其中,为无量纲的流量系数,为无量纲的时间,为无量纲的压升系数,为与压气机特性方程相关的参数,为无量纲喘振参数,为管道平均长度,为节流参数,为和压气机有关的常数。
13、一种压气机的喘振诊断和抑制装置,包括:建模模块,用于建立面向压气机喘振动态行为的压气机系统仿真模型;模拟仿真模块,用于根据所述压气机系统仿真模型进行模拟仿真,获得所述压气机不同运行状态的运行数据,其中,所述运行数据的一部分作为训练数据集、另一部分作为运行数据集;辨识模块,用于通过所述训练数据集对混合深度学习模型进行训练,并利用训练后的混合深度学习模型对所述运行数据集进行压气机无量纲喘振参数辨识,得到所述压气机的无量纲喘振参数辨识结果;判断模块,用于根据所述压气机的无量纲喘振参数辨识结果判断所述压气机是否处于喘振状态;控制模块,用于当所述压气机处于喘振状态时,进行退喘控制。
14、另外,根据本发明提出的压气机的喘振诊断和抑制装置还可以具有如下附加的技术特征:
15、根据本发明的一个实施例,所述运行数据包括所述压气机的进气压力、进气流量、出口压力、出口流量、出口压升系数、出口流量系数和无量纲喘振参数。
16、根据本发明的一个实施例,所述混合深度学习模型包含两层结构,第一层结构为长短期记忆神经网络lstm,第二层结构为高斯过程回归gpr。
17、根据本发明的一个实施例,辨识模块具体用于:将所述训练数据集中的所述出口压升系数和所述出口流量系数作为输入变量、所述训练数据集中的所述无量纲喘振参数作为输出变量,并对所述输入变量和所述输出变量进行归一化处理;利用归一化后的训练数据集对所述混合深度学习模型进行训练;将所述运行数据集中所述压气机的进出口压力和流量输入到训练后的混合深度学习模型的长短期记忆神经网络lstm,输出所述运行数据集的无量纲喘振参数的第一次估计值,并将所述第一次估计值输入训练后的高斯过程回归gpr,输出无量纲喘振参数的第二次估计值,以及将所述第二估计值作为所述压气机的无量纲喘振参数辨识的辨识结果。
18、根据本发明的一个实施例,所述控制模块具体包括基于扰动实时观测的主动控制系统,使用eso对所述压气机喘振的扰动实时观测的主动控制系统的总扰动进行估计,通过反馈控制来消除,以达到抗扰的目的,令所述压气机的出口流量和压力趋于稳定,以实现脱喘控制,其中,进行扰动实时观测的扰动实时观测器的具体形式为:
19、
20、其中,是状态观测器的观测增益,是设计的输入增益,和被用于反馈控制设计,观测状态是误差估计的总和,为输入控制量,y为被控系统的输出;所述扰动实时观测的主动控制系统的表达式为:
21、
22、其中,为无量纲的流量系数,为无量纲的时间,为无量纲的压升系数,为与压气机特性方程相关的参数,为无量纲喘振参数,为管道平均长度,为节流参数,为和压气机有关的常数。
23、本发明的有益效果:
24、本发明采用混合深度学习模型进行压气机的无量纲喘振参数辨识,能够精准诊断压气机的喘振状态,在压气机处于喘振状态时进行退喘控制,能够对压气机的喘振进行有效抑制,有利于压气机的稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!