光伏集成流体泵最大功率及恒压控制方法与流程
本发明涉及光伏集成流体泵控制,特别是光伏集成流体泵最大功率及恒压控制方法。
背景技术:
1、光伏集成流体泵应用于取电困难或者取电成本高昂的地方,主要用于农田灌溉,也可以应用在电力系统变压器自动提取冷却油液,用于评判变压器的工作状态。由于采用了光伏用电,且需要流体泵出口压力恒定,因此需要对其进行光伏最大功率以及流体泵恒压控制。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种光伏集成流体泵最大功率及恒压控制方法,实现光伏发电最大功率以及流体泵恒压控制,具有很强的实用性和广阔的应用发展前景。
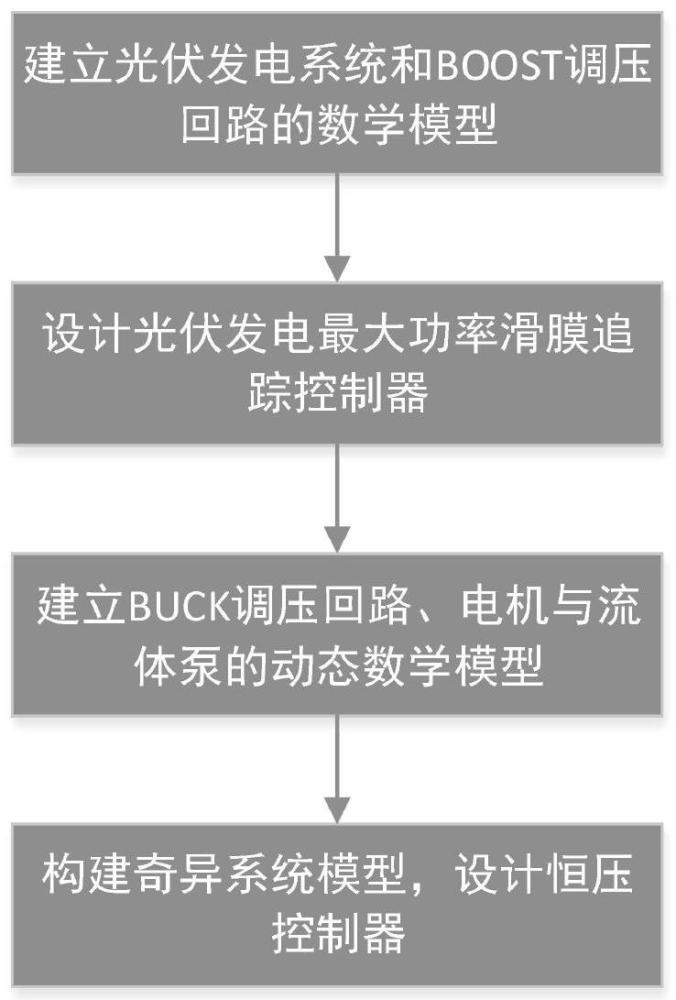
2、为实现上述目的,本发明采用如下技术方案:光伏集成流体泵最大功率及恒压控制方法,首先建立光伏发电系统和boost调压回路的数学模型,设计光伏发电最大功率滑膜追踪控制器;然后建立buck调压回路、电机与流体泵的动态数学模型,构建奇异系统模型,设计恒压控制器。
3、在一较佳的实施例中,光伏发电系统通过boost调压回路,采用最大发电功率调控后,输出最大电能并通过buck调压回路调控直流电机的转速,进而带动流体泵输出恒定的压力。
4、在一较佳的实施例中,按下列的步骤建立光伏单元发电系统模型并求解最大功率的参考电压:
5、首先,建立光伏单元发电电路数学模型,通过基尔霍夫电流定律,获得以下的动态方程:
6、icell=iph-ir-ish, (1)
7、其中,icell是光伏单元电流,iph代表光子电流,ir是逆向电流,ish是关断电流;
8、光子电流iph表达如下:
9、iph=gt*(τ*α)*s*acell, (2)
10、其中,gy光伏辐射强度,*是表示乘法,τ和α分别是透射率和吸收率,s是常数,acell是光伏面积;
11、逆向电流ir的表达式如下:
12、
13、其中,i0是逆向饱和电流,q是电荷,b是一个关联到光伏种类的常系数,k是玻尔兹曼常数系数,tcell是单元温度,icell是光伏单元电流,rs是光伏单元的电阻,vcell是光伏单元电压,exp(*)代表e*;
14、根据基尔霍夫电压定律,获得以下的关断电流ish动态方程:
15、
16、接着,建立光伏阵列发电系统的数学模型,得到:
17、varry=n*vcell, (5)
18、iarry=m*icell, (6)
19、其中,n代表光伏单元的串联数,m代表光伏单元的并联数,varry是光伏发电系统的电压,icell是光伏发电系统的电流。
20、将(1)-(5)代入(6)后,得到:
21、
22、最后,计算光伏发电功率为:
23、parry=varry*iarry. (8)
24、为了获得光伏发电最大功率parry,令找到最佳的调控电压参考值为此,求解parry对于阵列电压varry的偏导数,得到:
25、
26、现在对公式(6)两端求解varry的偏导数,得到:
27、
28、将公式(10)获得的代入(9),那么获得最大功率的参考电压计算如下:
29、
30、在一较佳的实施例中,建立boost调压回路的数学模型并设计光伏发电最大功率滑膜追踪控制器:
31、首先,光伏发电系统需要追踪才能获得最大发电功率,建立如下的boost调压回路的数学模型:
32、
33、其中,u1是占空比,也就是要设计的最大功率滑膜追踪控制器;l和c0分别是电感和电容,varry和iarry是boost调压回路输入电压和输入电流,vdc是电容c0的两端电压,i0是输出电流;
34、写成奇异系统状态空间表达式,如下:
35、
36、其中,
37、为了实现光伏发电最大功率的调控,必须满足:
38、
39、其中,c1=[0 1],εv是最大功率的追踪误差。
40、接着,引入以下的积分滑膜控制器:
41、
42、其中,s1(t)是设计的滑膜面,f1和k1是待求解的控制器增益;
43、通过对s1(t)进行求导,得到:
44、
45、令f1*c1=g1*e1,并且找到一个指定的g1使得g1*b1(t)是非奇异的,那么公式(16)改写如下:
46、
47、令u1(t)设计如下:
48、u1(t)=[g1*b1(t)]-1*g1*(-a1(t)*x1(t)-w1(t))+[g1*b1(t)]-1+k1*εv. (18)
49、其中,[g1*b1(t)]-1是对矩阵g1*b1(t)求逆。
50、将公式(18)代入(17),获得进一步设计滑膜切换律如下:
51、uc1(t)=-[g1*b1(t)]-1*∈1*sgn(s1(t)), (19)
52、其中,∈1是给定的一个标量,sgn是符号函数。
53、组合后,得到光伏最大功率追踪控制器如下:
54、
55、其中,矩阵g1可以被切分为g1=[g11 g12];
56、为了验证光伏最大功率追踪控制器的有效性,建立以下的李雅普诺夫函数:
57、
58、对以上公式进行求导,得到:
59、
60、由此可见,设计的光伏最大功率控制器使得s1(t)趋于零,这样从公式(15)看出εv趋于零,实现了光伏最大功率追踪控制;
61、在一较佳的实施例中,按如下方法建立buck调控电路、直流电机与流体泵的数学模型并设计恒压控制器:
62、首先,建立如下的buck调控电路数学模型:
63、
64、其中,u2是占空比,也就是要设计的恒压控制器;l2和c2分别是电感和电容,il2是流过电感l2的电流,rc2和rl2分别是电容c2和电感l2的电阻,vdc和vm分别是输入电压和输出电压,im是输出电流,vd2是二极管的端电压,rm是mos管的电阻;
65、接着,建立如下的直流电机与流体泵的数学模型:
66、
67、其中,vm代表加载在直流电机两端的电压,rm和im表示直流电机的内阻和电流,km是机械常数,wm是电机的输出轴转速,lm是电枢绕组电感,j是转动惯量,kp是流体泵的常数,kb是电机关联到流体泵的压力常数,po和pi分别表示流体泵的输出和吸入压力;
68、消去了中间变量wm,那么公式(24)可以重新组合为:
69、
70、为了公式表达的方便,将上式写成状态空间表达式如下:
71、
72、其中,
73、进一步考虑恒压的参考压力为pr,建立恒压追踪误差为:
74、
75、其中,c2=[0 1 0 0],εp是压力追踪误差。
76、接着,引入以下的积分滑膜控制器:
77、
78、其中,s2(t)是设计的滑膜面,f2和k2是待求解的控制器增益;
79、通过对s2(t)进行求导,得到:
80、
81、令f2*c2=g2*e2,并且找到一个指定的g2使得g2*b2是非奇异的,那么公式(29)改写如下:
82、
83、令u2(t)设计如下:
84、u2(t)=[g2*b2]-1*g2*(-a2(t)*x2(t)-w2(t))+[g2*b2]-1+k2*εp. (31)
85、将公式(30)代入(29),获得进一步设计滑膜切换律如下:
86、uc2(t)=-[g2*b2]-1*∈2*sgn(s2(t)), (32)
87、其中,∈2是给定的一个标量;
88、组合后,得到流体泵恒压控制器如下:
89、
90、其中,g2=[g21 g22 g23 g24].
91、为了验证恒压控制器设计的有效性,建立以下的李雅普诺夫函数:
92、
93、对以上公式进行求导,得到:
94、
95、由此可见,设计的光伏最大功率控制器使得s2(t)趋于零,这样从公式(27)看出εp趋于零,实现了流体泵的恒压控制。
96、与现有技术相比,本发明具有以下有益效果:一种光伏集成流体泵最大功率及恒压控制方法,该方法通过建立光伏发电系统和boost调压回路的数学模型,设计光伏发电最大功率滑膜追踪控制器;建立buck调压回路、电机与流体泵的动态数学模型,构建奇异系统模型,设计恒压控制器,可以实现光伏发电最大功率以及流体泵恒压控制,具有很强的实用性和广阔的应用发展前景。
- 还没有人留言评论。精彩留言会获得点赞!