一种重载液压缸及其控制方法与流程
本发明属于液压缸,具体涉及一种重载液压缸及其控制方法。
背景技术:
1、液压缸是一种利用液体的压力来产生力和运动的装置。它由一个气缸和一个活塞组成,液体通过液压系统被输送到气缸中,使活塞受到压力而产生力和运动。
2、现有技术中公开了申请号为cn201110256362.3的中国专利,公开了一种伸缩旋转式液压缸,其包括缸体、活塞以及活塞杆,所述活塞的两侧均设置有活塞杆,所述活塞至少有一侧的活塞杆和缸体之间设置有旋转导向装置,所述旋转导向装置包括开设于活塞杆上的螺旋导向槽,配合螺旋导向槽于缸体内壁上固定有限位螺塞,所述限位螺塞卡在螺旋导向槽内且能沿螺旋导向槽滑动。上述伸缩旋转式液压缸于活塞杆和缸体之间增设相互配合的螺旋导向槽和限位销,当液压缸的活塞杆在做直线运动时,卡在螺旋导向槽内的限位销将驱使活塞杆同时发生转动,以实现活塞杆在做直线运动的同时完成旋转动作。不仅结构简单,动作可靠;而且省去了完成复合动作所需的附加机构,降低了费用,提高了经济效益。
3、在机械进程中,由液压缸带动的许多外部构件不仅需要直线行程,同时还需要有旋转动作,但液压缸本身只能实现伸缩功能,不能实现旋转动作,为此我们提出一种重载液压缸。
技术实现思路
1、本发明的目的在于提供一种重载液压缸及其控制方法,旨在解决背景技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:
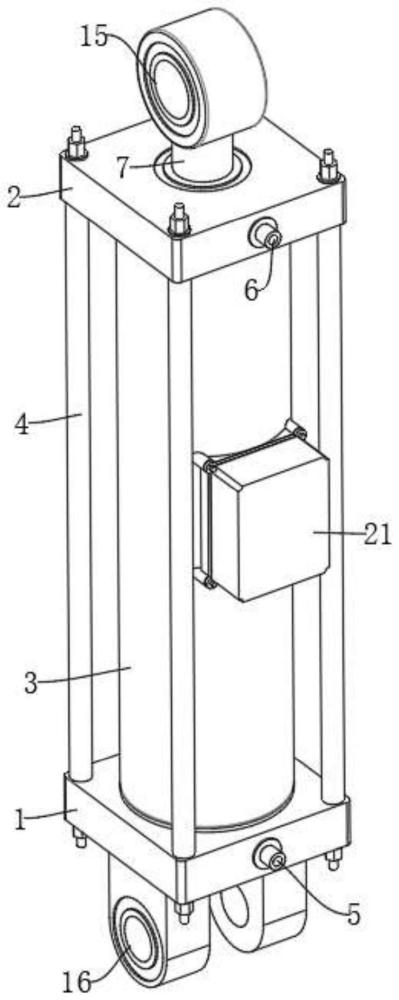
3、一种重载液压缸,包括缸底、缸盖和缸筒,所述缸筒密封连接于缸底和缸盖之间,所述缸底侧部设置有第一油口,所述缸盖侧部设置有第二油口,所述缸底和缸盖之间固定连接有加固杆,所述缸底内设置有主杆体和副杆体,所述主杆体滑动连接于缸底并向外延伸,所述副杆体的圆周表面固定连接有活塞,所述主杆体和活塞之间设置有转接机构,所述主杆体的圆周表面安装有主杆体,所述缸筒的表面设置有安装部,所述安装部内设置有转动机构,通过转动机构可驱动主杆体转动。
4、作为本发明一种优选的方案,所述转接机构包括旋接器,所述旋接器对称设置有两个并通过螺栓固定连接,两个所述旋接器相靠近的一侧设置有安装槽,所述主杆体和副杆体相靠近一端均固定连接有t形圆接头,两个所述t形圆接头均转动连接于安装槽内。
5、作为本发明一种优选的方案,所述转动机构包括密封盖、小齿轮和伺服电机,所述密封盖固定连接于安装部的下内壁,所述小齿轮转动连接于密封盖内,所述密封盖与齿轮柱相啮合,所述伺服电机固定连接于安装部的下内壁,所述小齿轮固定连接于伺服电机的输出端。
6、作为本发明一种优选的方案,所述主杆体靠近t形圆接头处设置有定位槽,所述齿轮柱的内壁设置有定位条,所述定位条与定位槽相嵌合。
7、作为本发明一种优选的方案,所述齿轮柱的侧部设置有镂空槽。
8、作为本发明一种优选的方案,所述安装部处固定连接有保护盖,所述伺服电机、小齿轮和密封盖均位于保护盖内。
9、作为本发明一种优选的方案,所述主杆体靠近缸盖的一端固定连接有第一耳轴。
10、作为本发明一种优选的方案,所述缸底的底部固定连接有第二耳轴。
11、作为本发明一种优选的方案,所述缸底和缸盖与缸筒的连接处均嵌合有密封圈。
12、作为本发明一种优选的方案,所述加固杆均匀分布于缸盖的四角处,所述加固杆位于缸底和缸盖之间部分直径加粗。
13、本发明的一种重载液压缸的控制方法,包括以下步骤:
14、步骤s1,第一油口5和第二油口6液体流动,使得活塞8推动副杆体9和主杆体7直线移动,继而达到基础伸缩的目的;
15、步骤s2,在主杆体7的表面安装齿轮柱13,且在密封盖18内安装小齿轮19,通过伺服电机20的输出端驱动小齿轮19转动,由于小齿轮19与齿轮柱13啮合,能够带动齿轮柱13转动,最后带动主杆体7转动,在基础伸缩的前提下,实现主杆体7的自转功能;
16、作为改进,步骤s2中,通过传感器实时监测外部环境、负载情况以及液压缸的运行状态,传送给控制器,经过驱动对伺服电机的输出进行智能调控,使得主杆体实现多功能自转,并能够自适应不同工作条件下的需求;具体过程为:
17、步骤1.收集液压缸运行时的数据,包括外部环境信息、负载情况、液压缸运动状态;数据包括输入特征x和输出标签y,其中x包括温度、负载情况、液压缸速度;
18、上述环境温度通过温度传感器获取;压力传感器可以测量液压缸中的液体压力,从而间接地获取负载情况;当液压缸承受外部负载时,液体压力会相应地增加,通过测量压力的变化,可以推断负载的大小;位移传感器可以测量液压缸的活塞位移,然后通过对位移随时间的变化进行微分,得到液压缸的速度;这种方法适用于液压缸的直线运动;如果液压缸涉及到旋转运动,可以使用旋转编码器安装在旋转部分,测量液压缸的旋转角度,并通过对角度随时间的变化进行微分,获取液压缸的旋转速度;
19、步骤2.对采集到的数据进行特征提取,选择与主杆体自转功能相关的特征,包括温度、负载情况、液压缸速度;特征提取后得到特征矩阵x;根据采集到的数据,标注主杆体在不同条件下的自转角度作为训练集的输出标签y;
20、步骤3.automl选择神经网络结构:使用automl工具库autokeras,让算法自动选择适合回归问题的神经网络结构,autokeras通过搜索空间中的神经网络结构进行选择,包括隐藏层的数量、每层的神经元数;使用选择的神经网络结构对训练集x和标签y进行训练;
21、automl选择神经网络结构,包括输入层、隐藏层和输出层,令x表示输入特征,y表示输出标签,神经网络的预测输出为
22、输入层:x=[x1,x2,...,xn],其中n是输入特征的数量,包括温度、负载情况、液压缸速度特征数据;
23、隐藏层:包含m个神经元,激活函数为f,隐藏层的输出为h=[h1,h2,...,hm];
24、hi=f(wi1x1+wi2x2+...+winxn+bi)
25、其中,hi:隐藏层神经元的输出,表示隐藏层对输入特征的非线性变换结果;wij是输入层到隐藏层的权重,反映液压缸运动特性与输入参数之间的关系,bi是偏置;
26、输出层:单个神经元,激活函数为线性激活函数,输出为:
27、
28、其中,神经网络的输出,即模型对主杆体自转角度的预测;vi是隐藏层到输出层的权重,表示隐藏层的输出对最终输出的影响程度,这些权重可以学习到主杆体自转功能与输入参数之间的复杂关系;c是偏置,用于调整最终输出的水平;
29、损失函数:使用均方误差(mean squared error)作为损失函数:
30、
31、其中,loss:损失函数,用于衡量模型预测与实际输出之间的差异;m是训练样本数量,是模型对第j个样本的预测输出,yj是实际输出,即标注的主杆体自转角度;
32、反向传播:使用梯度下降法来更新权重和偏置,减小损失函数,根据链式法则,计算梯度并更新参数;
33、步骤4.在神经网络训练过程中,automl可以进一步自动调整神经网络的超参数,包括学习率、批处理大小,以提高模型的性能;
34、步骤5.部署训练好的神经网络模型到液压缸的控制系统中,在运行时,通过传感器获取当前的环境和状态信息,并将这些信息输入到神经网络中,以预测主杆体的自转角度,然后,根据预测结果调整伺服电机的输出,实现更加精确、灵活的自转功能;具体能够实现的预测包括:
35、角度预测:利用神经网络模型预测主杆体的自转角度,通过监测传感器获取的实时环境和状态信息,输入到神经网络中,得到对主杆体自转角度的预测,在实时系统中引入合适的滤波和校正机制,以确保角度预测的精准性;
36、运动趋势预测:预测主杆体的自转趋势,即判断主杆体是向左自转还是向右自转,并预测自转的速度,这样的预测方式可以更好地指导伺服电机的输出调整,使得自转功能更加灵活和及时响应外部变化;
37、负载适应性预测:预测主杆体的负载情况,即预测主杆体所承受的外部力和扭矩,这有助于调整伺服电机的输出,以适应不同负载下的自转需求,提高系统的适应性;
38、异常检测与预警:利用神经网络监测主杆体自转角度的异常情况,当检测到异常时及时发出预警,这有助于提前发现潜在问题并采取措施,保障系统的安全和可靠性;
39、实时调整策略预测:预测在不同工况下的最优伺服电机调整策略,以实现更加精确、高效的主杆体自转功能,这涉及到根据实时环境和状态信息动态调整神经网络模型参数的方法。
40、与现有技术相比,本发明的有益效果是:
41、1、本方案中在主杆体的表面安装齿轮柱,且在密封盖内安装小齿轮,通过伺服电机的输出端驱动小齿轮转动,由于小齿轮与齿轮柱啮合,能够带动齿轮柱转动,最后带动主杆体转动,在基础伸缩的前提下,实现主杆体的自转功能,以适配更多的机械运动,结构精简合理,省去了完成复合动作所需的附加机构,降低了生产成本。
42、2、本方案中旋接器拼接式结构,安装时先将定位条嵌合在定位槽内,然后固定旋接器,以固定齿轮柱的位置,容易组装结构稳固。
43、3、本发明的创新点之一在于automl算法能够智能地选择合适的神经网络结构、超参数和优化算法,使得神经网络能够更好地适应重载情况下液压缸不同的工作条件和数据特征,这种自适应性和优化能力可以提高系统在不同环境和工况下的性能表现,使得主杆体的自转功能更加稳定、灵活。因此通过automl算法的优化能力有助于确保主杆体的自转功能在复杂和多变的工作环境中仍然能够稳定运行。
44、此外,automl算法可以通过对数据的自动分析,选择和提取对主杆体自转功能影响最大的特征,而无需人工干预,这有助于提高神经网络的训练效率,使得模型更加精确地学习到系统的动态特性。automl的引入减轻了对模型设计和调整的人工负担,使得算法的应用更加自动化和智能化。这有助于减少系统设计和调整的时间,提高了开发效率。automl的算法会自动进行模型选择和优化,提高了神经网络的泛化能力,使得模型更好地适应未见过的数据和工作条件,降低了过拟合的风险。
- 还没有人留言评论。精彩留言会获得点赞!