一种高效自承载磁流变可控阻尼器件
1.本发明属于缓冲技术领域,具体涉及一种高效自承载磁流变可控阻尼器件。
背景技术:
2.在航空领域,起落架是飞行器结构中的重要装置之一,其性能直接影响到飞行器起飞、飞行、降落、滑跑及地面试车等过程。直升机在遂行多样性任务垂直起降时,面对复杂的地形特征具有倾覆危险,需要开展起落架姿态智能控制,提高起落架的复杂地形自适应能力。在现代化战争条件下,大型军用直升机必须具有能在半准备机场、战损修复道面、半准备平坦地面甚至战区野外场地等复杂场地情况下起降的能力,在这种情况下起落架将承受巨大的随机冲击载荷。除了传统要求的结构重量轻、承载能力强、地面操纵特性好之外,还必须满足许多新的性能要求,如应有很强的场地适应性、高效的减震缓冲性能、较好的抗坠毁性能,起落架的可收放性能和有效防止“地面共振”等。现有技术下,直升机在复杂条件下的起降能力得不到保证。因此,需要一种自适应智能起落架设计方案,使直升机在起降过程中具有在复杂地形条件下的起降能力与安全性。
3.在铁道车辆领域,蛇形运动不可避免的存在。蛇形运动主要由于轮轨关系和蠕滑力引起。长时间大幅度的蛇形运动会产生较大的轮轨动力作用和振动加速度,对车辆系统振动和运行安全产生重大影响。某些位移较小的蛇形运动尽管不会引起安全问题,但车体晃动和弹性振动会严重影响乘坐舒适度。面向高速列车抗蛇形运动的减振器需要具备很大的阻尼力。因此,在铁道车辆抗蛇形运动领域,需要一种阻尼力可控范围大大拓宽的减振器。
4.在机器人领域,有效精准快速地对关节机构进行控制是研究的重难点。例如工业中常用的关节手臂机器人、实验室研究的仿生足式机器人,控制的目的是要控制机器人末端的位置和姿态达到期望的位置并且及时锁止。对于运动受限的大型工业机器人来说,其控制问题要复杂得多。由于机器人与环境接触,这时不仅要控制机器人末端位置,还要控制末端作用于环境的力。而用于改变姿态的高精度步进电机往往为了达到精度要求,而无法提供较大的锁止力。因此,在机器人领域,急需一种能够提供较大锁止力的装置,并且能够及时撤去锁止力,使装置能够达到控制定位要求。
技术实现要素:
5.为实现本发明目的而采用的技术方案是这样的,一种高效自承载磁流变可控阻尼器件,包括外缸筒、内缸筒、活塞、活塞杆、电磁组件、和交指流道系统。
6.所述外缸筒的上下端均封闭。所述内缸筒位于外缸筒内,内缸筒上端连接在外缸筒的上端的封闭处。所述内缸筒与外缸筒内壁之间存在间隙。将内缸筒外壁与外缸筒内壁之间的空间记为外油腔。所述外缸筒和内缸筒内部均充有磁流变液。
7.所述活塞位于内缸筒内,并将内缸筒内腔体分隔为上油腔和下油腔。所述活塞杆一端与活塞固定连接,另一端从上油腔穿出内缸筒。
8.所述电磁组件呈圆筒状,其外壁缠绕有线圈。所述电磁组件位于外缸筒内。所述电磁组件下端连接在外缸筒下端的封闭处,电磁组件下端开设有连通外油腔的通孔。所述电磁组件上端与内缸筒下端连接。所述电磁组件内部空间与下油腔连通。
9.所述交指流道系统包括多个内垫圈和多个外垫圈。
10.多个所述内垫圈间隔布置在电磁组件外壁上。多个所述外垫圈间隔布置在外缸筒内壁上。所述内垫圈与外垫圈交错分布。所述内垫圈和外垫圈均为导磁垫圈。
11.当线圈通电时,产生磁场,通过电磁组件约束传导,在内垫圈以及外垫圈之间形成沿电磁组件轴向的磁场。
12.进一步,所述外缸筒下端的封闭端为圆筒状。所述封闭端内容纳有超声波检测装置和控制电路板。
13.所述控制电路板连接线圈。当超声波检测装置检测到封闭端接触到地面时,超声波检测装置输出信号至控制电路板,控制电路板输出指令对线圈通电。
14.进一步,相邻两个内垫圈之间通过内支撑件支撑。相邻两个外垫圈之间通过外支撑件支撑。
15.进一步,所述内支撑件和外支撑件均由不导磁材料制成。
16.进一步,所述内缸筒上端的外壁上设置有多个流通孔。
17.进一步,所述活塞与内缸筒内壁之间存在间隙。
18.进一步,所述电磁组件为磁轭。
19.进一步,所述电磁组件上端设置有圆环凸台。所述内缸筒下端套设在电磁组件上端的圆环凸台上。
20.进一步,所述外缸筒由不导磁材料制成。
21.本发明的技术效果是毋庸置疑的,具有如下优点:
22.1)传统阻尼器件一般配合弹性元件使用,并由弹性元件承担静态载荷,阻尼器件本身仅在动态工作时产生阻尼力。即使磁流变液阻尼器件在磁流变液动态屈服前具备一定的承载能力,但由于动态范围不够宽广而承载能力不足;本发明的交指流道系统为层层交叠的结构,可以实现均匀强磁场,且磁场控制下的有效流动通道长度成倍增加,可以使阻尼器件的静载承受能力大幅提高,能够有效实现锁止功能。
23.2)本发明能够充分利用磁流变液响应速度快、阻尼力可控的特点,在防止地面共振的同时能够实现快速锁止,不仅适用于直升机在复杂战场环境下的起降,还适合应用于机器人、铁道车辆的锁止装置中,实现高效自承载;
24.3)本发明采用循环流道设计,巧妙缓解了因磁流变液长期服役带来的沉降问题。运动过程中,磁流变液能够循环流动,长久以来的沉降板结等问题得到有效解决。
附图说明
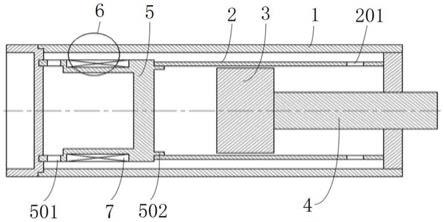
25.图1为本发明的总体结构示意图;
26.图2为图1的交指流道系统局部放大图;
27.图3为交指流道磁力线示意图。
28.图中:外缸筒1、内缸筒2、流通孔201、活塞3、活塞杆4、电磁组件5、通孔501、圆环凸台502、交指流道系统6、内垫圈601、外垫圈602、内支撑件603、外支撑件604和线圈7。
具体实施方式
29.下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
30.实施例1:
31.本实施例公开一种高效自承载磁流变可控阻尼器件,参见图1,包括外缸筒1、内缸筒2、活塞3、活塞杆4、电磁组件5、和交指流道系统6。
32.所述外缸筒1的上下端均封闭,具体的,外缸筒1上端敞口处通过螺纹连接有顶盖,外缸筒1下端的封闭端为圆筒状。封闭端通过螺纹连接在外缸筒1下端敞口处,所述封闭端内容纳有超声波检测装置和控制电路板。所述内缸筒2位于外缸筒1内,内缸筒2上端连接在外缸筒1的上端的封闭处。所述内缸筒2与外缸筒1内壁之间存在间隙。将内缸筒2外壁与外缸筒1内壁之间的空间记为外油腔。所述内缸筒2上端的外壁上加工有多个流通孔201。所述外缸筒1和内缸筒2内部均充有磁流变液。外缸筒1由不导磁材料制成。
33.所述活塞3位于内缸筒2内,并将内缸筒2内腔体分隔为上油腔和下油腔。所述活塞3与内缸筒2内壁之间存在一定间隙。所述活塞杆4一端与活塞3固定连接,另一端从上油腔穿出内缸筒2,并从外缸筒1的顶盖穿出。
34.所述电磁组件5为磁轭,所述电磁组件5呈圆筒状,其外壁设置有环形凹槽,环形凹槽内缠绕有线圈7。线圈7的引线穿过外缸筒1下端的封闭端,与控制电路板连接。所述电磁组件5位于外缸筒1内。所述电磁组件5下端连接在外缸筒1下端的封闭处,电磁组件5下端开设有连通外油腔的通孔501。所述电磁组件5上端与内缸筒2下端连接,具体的,所述电磁组件5上端具有圆环凸台502。所述内缸筒2下端套设在电磁组件5上端的圆环凸台502上。所述电磁组件5内部空间与下油腔连通。
35.参见图2,所述交指流道系统6包括多个内垫圈601和多个外垫圈602。
36.多个所述内垫圈601间隔固定在电磁组件5外壁上,相邻两个内垫圈601之间通过内支撑件603支撑。多个所述外垫圈602间隔固定在外缸筒1内壁上,相邻两个外垫圈602之间通过外支撑件604支撑。所述内垫圈601与外垫圈602交错分布。所述内垫圈601和外垫圈602均为导磁垫圈。所述内支撑件603和外支撑件604均由不导磁材料制成。
37.交指流道系统6的工作原理为:当线圈7通电时,产生磁场,通过电磁组件5约束传导,在内垫圈601以及外垫圈602之间形成沿电磁组件5轴向的磁场,充斥其中的磁流变液在磁场作用下,屈服强度变大,在达到屈服应力前,磁流变液为固态,难以从中流通,加之,若干剪切面交织层叠,可以产生极大的阻尼力,从而达到锁止的目的。
38.参见图3,图3为磁场分析软件ansys计算出的交指流道6系统的周围磁场线分布。当所加电流密度为107a/m2时,交指流道6系统处的磁场强度为0.539t,此时磁路最大磁感应强度为1.6t左右,还远未饱和,甚至可以实现更高强度的均匀磁场,使磁流变液的剪切屈服应力能够满足锁止的要求。
39.本实施例的阻尼器件适用于直升机起降,在本实施例中,将活塞3的平衡位置记为位于外缸筒1中最靠近顶盖的位置。当直升机缓慢降落,起落架受压时,活塞杆4推动活塞3向下运动,活塞3脱离平衡位置。迫使下油腔中的磁流变液从电磁组件5下端通孔501处进入外油腔中,经内缸筒2上的流通孔201流入上油腔。一旦超声波检测装置检测到阻尼器件距
离地面为0时,此时表明直升机达到水平停泊条件,超声波检测装置输出信号至控制电路板,控制电路板输出指令对线圈7通电,在交指流道系统6处的磁流变液的屈服强度会在毫秒时间量级内迅速增强10倍以上,产生足够支撑起直升机的阻尼力。直升机起飞时,线圈7断电,交指流道系统6处的磁流变液恢复到液态,剪切屈服强度很小,活塞杆4复原,上油腔的磁流变液经过内缸筒2的流通孔201进入外油腔中,经电磁组件5下端的通孔501流入下油腔。
40.实施例2:
41.本实施例提供一种较为基础的实现方式,一种高效自承载磁流变可控阻尼器件,参见图1,包括外缸筒1、内缸筒2、活塞3、活塞杆4、电磁组件5、和交指流道系统6。
42.所述外缸筒1的上下端均封闭。所述内缸筒2位于外缸筒1内,内缸筒2上端连接在外缸筒1的上端的封闭处。所述内缸筒2与外缸筒1内壁之间存在间隙。将内缸筒2外壁与外缸筒1内壁之间的空间记为外油腔。所述外缸筒1和内缸筒2内部均充有磁流变液。外缸筒1由不导磁材料制成。
43.所述活塞3位于内缸筒2内,并将内缸筒2内腔体分隔为上油腔和下油腔。所述活塞杆4一端与活塞3固定连接,另一端从上油腔穿出内缸筒2。
44.所述电磁组件5呈圆筒状,其外壁设置有环形凹槽,环形凹槽内缠绕有线圈7。所述电磁组件5位于外缸筒1内。所述电磁组件5下端连接在外缸筒1下端的封闭处,电磁组件5下端开设有连通外油腔的通孔501。所述电磁组件5上端与内缸筒2下端连接,所述电磁组件5内部空间与下油腔连通。
45.参见图2,所述交指流道系统6包括多个内垫圈601和多个外垫圈602。
46.多个所述内垫圈601间隔固定在电磁组件5外壁上。多个所述外垫圈602间隔固定在外缸筒1内壁上。所述内垫圈601与外垫圈602交错分布。所述内垫圈601和外垫圈602均为导磁垫圈。
47.交指流道系统6的工作原理为:当线圈7通电时,产生磁场,通过电磁组件5约束传导,在内垫圈601以及外垫圈602之间形成沿电磁组件5轴向的磁场,充斥其中的磁流变液在磁场作用下,屈服强度变大,在达到屈服应力前,磁流变液为固态,难以从中流通,加之,若干剪切面交织层叠,可以产生极大的阻尼力,从而达到锁止的目的。
48.参见图3,图3为磁场分析软件ansys计算出的交指流道6系统的周围磁场线分布。当所加电流密度为107a/m2时,交指流道6系统处的磁场强度为0.539t,此时磁路最大磁感应强度为1.6t左右,还远未饱和,甚至可以实现更高强度的均匀磁场,使磁流变液的剪切屈服应力能够满足锁止的要求。
49.实施例3:
50.本实施例主要结构同实施例2,进一步,外缸筒1上端敞口处通过螺纹连接有顶盖,外缸筒1下端的封闭端为圆筒状。封闭端通过螺纹连接在外缸筒1下端敞口处,所述封闭端内容纳有超声波检测装置和控制电路板。
51.所述控制电路板连接线圈7,具体的,线圈7的引线穿过外缸筒1下端的封闭端,与控制电路板连接。当超声波检测装置检测到封闭端接触到地面时,超声波检测装置输出信号至控制电路板,控制电路板输出指令对线圈7通电。
52.实施例4:
53.本实施例主要结构同实施例2,进一步,相邻两个内垫圈601之间通过内支撑件603支撑。相邻两个外垫圈602之间通过外支撑件604支撑。
54.实施例5:
55.本实施例主要结构同实施例4,进一步,所述内支撑件603和外支撑件604均由不导磁材料制成。
56.实施例6:
57.本实施例主要结构同实施例2,进一步,所述内缸筒2上端的外壁上设置有多个流通孔201。通过流通孔201实现外油腔和上油腔的连通。
58.实施例7:
59.本实施例主要结构同实施例2,进一步,所述活塞3与内缸筒2内壁之间存在一定间隙。
60.实施例8:
61.本实施例主要结构同实施例2,进一步,所述电磁组件5为磁轭。
62.实施例9:
63.本实施例主要结构同实施例2,进一步,所述电磁组件5上端设置有圆环凸台502。所述内缸筒2下端套设在电磁组件5上端的圆环凸台502上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1