用于离合器组件的速度传感器的制作方法
[0001]
本公开涉及一种包括离合器单元的离合器组件,并且更特定地涉及一种用于离合器组件的速度传感器。
技术实现要素:
[0002]
在一个方面中,一种离合器组件包括:壳体;旋转构件,所述旋转构件被配置成相对于所述壳体围绕轴线旋转;和离合器单元(clutch pack),所述离合器单元联接在所述壳体和所述旋转构件之间。所述离合器单元包括:分离器盘,所述分离器盘联接到所述壳体,使得所述分离器盘被固定而不能相对于所述壳体围绕所述轴线运动;摩擦盘,所述摩擦盘联接到所述旋转构件,使得所述摩擦盘被配置成与所述旋转构件一起围绕所述轴线运动;和速度传感器环,所述速度传感器环联接到所述旋转构件,使得所述速度传感器环被配置成与所述旋转构件一起围绕所述轴线旋转。所述离合器组件包括联接到所述壳体的传感器。所述传感器与所述速度传感器环通信,并且被配置成测量所述旋转构件相对于所述壳体的角速度。所述摩擦盘、所述分离器盘和所述速度传感器环被配置成沿着所述轴线轴向地移动,以调节所述旋转构件相对于所述壳体的运动。
[0003]
在另一方面中,一种离合器组件包括:壳体;旋转构件,所述旋转构件被配置成相对于所述壳体围绕轴线旋转;和离合器单元,所述离合器单元联接在所述壳体和所述旋转构件之间。所述离合器单元被配置成调节所述旋转构件相对于所述壳体的运动。所述离合器单元包括速度传感器环,所述速度传感器环联接到所述旋转构件,使得所述速度传感器环被配置成与所述旋转构件一起围绕所述轴线旋转。所述离合器组件包括与所述速度传感器环通信的传感器。所述传感器被配置成测量所述旋转构件相对于所述壳体的角速度。
[0004]
在又一方面中,一种离合器组件包括:壳体;旋转构件,所述旋转构件被配置成相对于所述壳体围绕轴线旋转;和离合器单元,所述离合器单元联接在所述壳体和所述旋转构件之间。所述离合器单元包括联接到所述壳体的盘。所述盘包括平行于所述轴线的第一最大宽度。所述离合器单元还包括速度传感器环,所述速度传感器环联接到所述旋转构件,使得所述速度传感器环被配置成与所述旋转构件一起围绕所述轴线旋转。所述速度传感器环包括平行于所述轴线的第二最大宽度。所述离合器组件包括与所述速度传感器环通信的传感器。所述传感器被配置成测量所述旋转构件相对于所述壳体的角速度。所述第二宽度与所述第一宽度的比率大于1.5。
[0005]
另外,通过考虑详细描述和附图,本公开的其它方面将变得显而易见。
附图说明
[0006]
图1是离合器组件的透视图。
[0007]
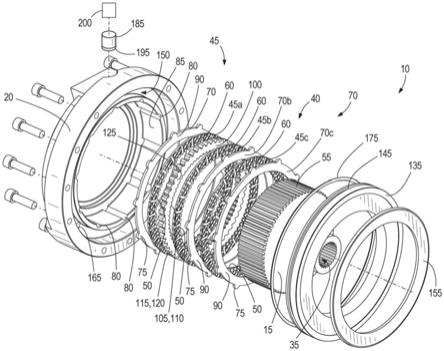
图2是图1的离合器组件的第一分解视图,离合器组件包括根据本公开的一个实施例的包括速度传感器环的离合器单元。
[0008]
图3是图1的离合器组件的第二分解视图
[0009]
图4是根据本公开的另一实施例的图1的离合器组件的速度传感器环的透视图。
[0010]
图5是图示了处于脱离状态中的离合器单元的沿着图1的线5-5截取的离合器组件的横截面。
[0011]
图6是图示了处于接合状态中的离合器单元的沿着图1的线5-5截取的离合器组件的横截面。
具体实施方式
[0012]
在详细解释本公开的任何实施例之前,应当理解,本公开在其应用方面不限于在以下描述中陈述或在附图中图示的部件的构造和布置的细节。本公开能够支持其它实施例并且以各种方式实践或执行。此外,应该理解,本文中所使用的措辞和术语是为了描述的目的,而不应该被认为是限制性的。程度术语,例如“基本上”、“大约”、“近似地”等被普通技术人员理解为指代给定值之外的合理范围,举例来说,与所描述的实施例的制造、组装和使用相关联的一般公差。
[0013]
图1图示了离合器组件10,离合器组件10包括围绕轴线25可旋转地联接到壳体20的主轴15(例如,旋转构件)。所图示的离合器组件10可操作作为用于车辆(例如,农用拖拉机等)、由车辆拉动或推动的移动装置(例如,拖车、农用打捆机、农用液体洒施机、拖运装置等)和/或自驱动的移动装置等的制动系统。因此,壳体20固定到结构(例如,车辆/移动装置的框架)上,以将离合器组件10支撑到车辆/移动装置。(例如,车辆、移动装置等的)轮轴30延伸穿过主轴15的中央花键孔35,并且可操作成驱动车轮、履带等,所述车轮、履带等借助于联接到轮轴30的另一端部的动力源(例如,发动机、马达、变速器等)联接到轮轴30的一个端部。这样,离合器组件10可操作以降低轮轴30的角速度,以制动车辆、移动装置等。
[0014]
参考图2和图3,离合器组件10包括联接在壳体20和主轴15之间的离合器单元40。离合器单元40包括摩擦盘45,摩擦盘45具有形成在摩擦盘45的内周边上的齿50,齿50与形成在主轴15的外周边上的齿55啮合,使得摩擦盘45与主轴15一起围绕轴线25运动。摩擦盘45和主轴15之间经由齿50、55的接合还允许摩擦盘45相对于主轴15和壳体20沿着轴线25轴向地移动。每个摩擦盘45包括具有相对高的摩擦系数的材料(例如,陶瓷材料等)的两个相反的侧表面60。另外,每个摩擦盘45包括在两个相反的侧表面60之间的——在沿着轴线25的方向上测量的——第一宽度65(图5)(例如,每个摩擦盘45的最大宽度)。
[0015]
离合器单元40还包括分离器盘70,分离器盘70具有形成在分离器盘70的外周边上的突起75,突起75接纳在形成在壳体20的内表面85上的凹槽80内,使得分离器盘70被固定而不能相对于壳体20围绕轴线25旋转。然而,分离器盘70和壳体20之间的接合允许分离器盘70相对于壳体20和主轴15沿着轴线25轴向地移动。每个分离器盘70包括两个相反的侧表面90,侧表面90具有摩擦系数低于摩擦盘45的材料(例如,金属材料,例如钢等)。另外,每个分离器盘70包括在两个相反的侧表面90之间的——在沿着轴线25的方向上测量的——第二宽度95(图5)(例如,每个分离器盘70的最大宽度)。在所图示的实施例中,分离器盘70的第二宽度95基本上与摩擦盘45的第一宽度65相同。然而,在其它实施例中,分离器盘70的第二宽度95可以大于或小于摩擦盘45的第一宽度65。
[0016]
离合器单元40进一步包括速度传感器环100,速度传感器环100具有形成在速度传感器环100的内周边110上的齿105,齿105与主轴15的齿55啮合。像摩擦盘45一样,速度传感
器环100与主轴15一起围绕轴线25运动,并且被允许相对于主轴15和壳体20沿着轴线25轴向地移动。速度传感器环100还包括形成在速度传感器环100的外周边120上的突起115和具有与分离器盘70类似的材料的两个相反的侧表面125。另外,速度传感器环100包括在两个相反的侧表面125之间的——在沿着轴线25的方向上测量的——第三宽度130(图5)(例如,速度传感器环100的最大宽度)。第三宽度130基本上大于第一宽度65和第二宽度95。举例来说,第三宽度130与第一宽度65的比率或者第三宽度130与第二宽度95的比率在大约1.5和大约10之间。在其它实施例中,第三宽度130与第一宽度65的比率或者第三宽度130与第二宽度95的比率在大约2和大约6之间。在进一步的实施例中,第三宽度130与第一宽度65的比率或者第三宽度130与第二宽度95的比率在大约2和大约4之间。
[0017]
如图2和图3中所示,离合器单元40包括三个摩擦盘45a、45b、45c和三个分离器盘70a、70b、70c,其中速度传感器环100定位在摩擦盘45a、45b之间。在其它实施例中,离合器单元40可以不同地配置。举例来说,离合器单元40可以包括三个以上或以下的摩擦盘45和/或三个以上或以下的分离器盘70,和/或分离器盘70可以联接到主轴15以用于与其一起旋转移动,并且摩擦盘45可以联接到壳体20。
[0018]
在进一步的实施例中,速度传感器环100可以与摩擦盘45a、45b制成为一个一体部件——如图4中所示,制成为包括形成在内周边110
’
上的齿105
’
和形成在外周边120
’
上的突起115
’
的速度传感器环100
’
。在一个实施例中,速度传感器环100
’
包括类似于摩擦盘45的基底材料,其中齿105
’
和突起115
’
被随后形成(例如,通过机加工工艺等)。因此,速度传感器环100
’
的侧表面125
’
具有与摩擦盘45类似的材料。在又一些实施例中,摩擦盘45a、45b可以被联接(例如,粘合、紧固等)到速度传感器环100,使得摩擦盘45a、45b固定到速度传感器环100,以用于与其一起移动。
[0019]
返回参考图2和图3,离合器组件10还包括联接在离合器单元40和壳体20之间的端环135。特别地,端环135包括与离合器单元40相互作用(例如,接合分离器盘70c;图6)的内凸缘140和接纳在壳体20的环形凹部150内的外凸缘145。偏压构件155(例如,盘形弹簧)定位在端环135和固定结构160(例如,壳体20附接在其中的车辆/移动装置的框架;图5和图6),以沿着轴线25朝向壳体20偏压端环135。另外,壳体20包括与环形凹部150连通的液压流体孔165,使得联接到液压流体孔165的液压泵170控制进入或离开环形凹部150的液压流体。垫圈175(例如,o形环等)联接到外凸缘145以接触环形凹部150的壁(图5和图6),使得液压流体被维持在限定在环形凹部150和外凸缘145的面180之间的腔内。
[0020]
参考图3,离合器组件10进一步包括传感器185,传感器185接纳在壳体20的传感器孔190内以与离合器单元40的速度传感器环100通信。所图示的传感器185是具有产生磁场的磁体195的接近传感器(例如,霍尔效应传感器、可变磁阻传感器等),所述磁场与速度传感器环100的突起115相互作用。在其它实施例中,传感器185可以是光学传感器(例如,红外线等)、声学传感器(例如,超声波等)等。另外,传感器185与控制处理器200通信,控制处理器200可操作成监测传感器185和速度传感器环100之间的相互作用。在一些实施例中,控制处理器200还可以与液压泵170通信,以控制泵170的操作。
[0021]
在操作中,离合器组件10可在至少两种状态——脱离状态(图5)和接合状态(图6)——之间移动。当在脱离状态中时,控制处理器200操作泵170以将液压流体引入环形凹部150内,并且对端环135的面180施加足够的液压压力,以抵抗偏压构件155的偏压力而轴
向地移动端环135。端环135远离壳体20的移动为离合器单元40提供了足够的间隙以轴向地膨胀,从而允许摩擦盘45的侧表面60、分离器盘70的侧表面90和速度传感器环100的侧表面125移动而彼此脱离接触。因此,离合器单元40不妨碍主轴15围绕轴线25相对于壳体20的运动(例如,主轴15、摩擦盘45和速度传感器环100可相对于壳体20和分离器盘70围绕轴线25自由地旋转)。在所图示的实施例中,当不期望对主轴15——以及最终轮轴30——制动时,控制处理器200将离合器组件10移动到脱离状态中。换句话说,当处于脱离状态中时,离合器单元40不调节主轴15的运动。
[0022]
当处于接合状态中时(图6),控制处理器200操作泵170以降低环形凹部150内的液压压力,从而允许偏压构件155将端环135朝向壳体20推动。特定来说,偏压构件155在端环135上施加压力,以用于使内凸缘140轴向地压缩离合器单元40,使得摩擦盘45的侧表面60、分离器盘70的侧表面90和速度传感器环100的侧表面125移动成彼此接触。因此,离合器单元40阻碍主轴15围绕轴线25的运动(例如,摩擦盘45、分离器盘70和速度传感器环100之间的摩擦力大于当离合器组件10处于脱离状态中时的摩擦力)。在所图示的实施例中,当期望对主轴15——以及最终轮轴30——制动时,控制处理器200将离合器组件10移动到接合状态中。换句话说,当处于接合状态中时,离合器单元40调节主轴15的运动(例如,制动主轴)。
[0023]
此外,由离合器组件10施加的制动量取决于环形凹部150内抵靠偏压构件155作用的液压压力(例如,当环形凹部150内不存在液压压力时发生最大制动,从而允许偏压构件155的最大力压缩离合器单元40)。在其它实施例中,偏压构件155可操作成将端环135偏压远离壳体20(例如,偏压构件155可以定位在环形凹部150内),并且来自泵170的液压压力可以可操作成使端环135朝向壳体20移动。在这个实施例下,当最大液压压力施加到端环135时发生最大制动,而当没有液压压力施加到端环135时不发生制动。
[0024]
控制处理器200经由传感器185和速度传感器环100之间的相互作用监测主轴15——以及最终轮轴30——的角速度。特定来说,当速度传感器环100与主轴15一起围绕轴线25运动时,由磁体195产生的磁场与速度传感器环100的突起115相互作用,并且控制处理器200基于相互作用的频率而确定主轴15的角速度。举例来说,如果主轴15以相对低的角速度运动,则当每个突起115移动经过传感器185时磁场与突起115相互作用的频率将相对低。然而,如果主轴15以相对高的角速度运动,则当每个突起115移动经过传感器185时磁场与突起115相互作用的频率将相对高。当离合器组件10处于脱离或接合状态中时,控制处理器200可操作成确定主轴15的角速度。
[0025]
速度传感器环100的第三宽度130大于第一宽度65和/或第二宽度95,以确保传感器185与速度传感器环100准确地相互作用。举例来说,第三宽度130的被定尺寸成当离合器组件10在脱离状态和接合状态之间移动时,磁场与突起115在速度传感器环100相对于传感器185沿着轴线25移动时准确地相互作用。然而,速度传感器环100不提供主轴15和壳体20之间的直接扭矩传递,不同于来自在相邻摩擦盘45和分离器盘70之间的接触的直接扭矩传递。这样,离合器组件10的性能随着第三宽度130的增加而降低。因此,如上文所描述,第三宽度130与第一宽度65的比率或者第三宽度130与第二宽度95的比率在大约1.5和大约10之间,以增加离合器组件10的性能并且确保对主轴15的角速度的准确测量。
[0026]
在其它实施例中,离合器组件10可以被用于其它类型的应用中。举例来说,离合器组件10可以包括在变速器内,其中壳体20和主轴15可围绕轴线25旋转。这样,离合器单元40
调节从壳体20传递到主轴15的扭矩量,反之亦然。
[0027]
尽管已经参考特定优选实施例详细描述了本公开,但是在如所描述的本公开的一个或多个独立方面的范围和精神内存在变化和修改。在以下权利要求中陈述了本公开的各种特征和优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1