一种半主动控制的摆式三维展柜隔震装置
1.本发明涉及振动控制隔震技术领域,特别是涉及一种半主动控制的摆式三维展柜隔震装置。
背景技术:
2.博物馆文物因展示的需求而需要放置在展柜中,若遭遇地震或环境振动等因素,易造成展柜内的文物失稳,此时展柜内的浮放文物可能面临倾覆、滑移等破坏。如果在展柜下设置隔震装置,则可以提高展柜及柜内文物在地震作用下的安全性。地震来临时,地震力先传递到装置上,随后装置发生运动并消耗能量,所以展柜隔震装置可削弱地震力向上部传递,来保护展柜及柜内文物的安全,当前博物馆应用的隔震装置多为水平隔震装置,未考虑地震竖向力的影响,且单一的机械式装置难以满足文物竖向隔震性能的要求。现有技术中没有能够实现水平隔震部件和竖向隔震部件的协调工作的展柜隔震装置,由于展柜隔震装置需要较大的承载力和较高的稳定性,而一般的三向隔震装置稳定性较低,且承载力不高。
技术实现要素:
3.为了解决上述技术问题,本发明提出一种半主动控制的摆式三维展柜隔震装置,该三维展柜隔震装置为组合型装置,其上部为可摩擦摆动的水平隔震部件,下部为竖向隔震部件,上下两个隔震部件皆为圆形或多边形,并用螺栓进行连接;所述水平隔震部件包括上承台、水平运动滑块、滑块支撑件,所述竖向隔震部件包括上支撑板、下支撑板、隔震弹簧和支撑杆,上支撑板为倒u型,下支撑板为u型,所述上支撑板套设在下支撑板外侧,所述下支撑板的外壁上设置有多个限位球,所述上支撑板侧壁下端设置有凸缘,所述凸缘与限位球相互配合用于对上支撑板进行限位,上支撑板和下支撑板之间设有多个隔震弹簧和一个调节支撑杆;
4.进一步地,所述上承台底部具有支撑柱,所述支撑柱与水平运动滑块固定连接,所述滑块支撑件上端的运动面为曲面结构,水平运动滑块滑动设置在滑块支撑件的曲面结构上;在外力作用下,水平运动滑块与滑块支撑件相互摩擦并且依靠摩擦力消耗地震能量;
5.进一步地,所述隔震弹簧与上支撑板、下支撑板焊接或螺栓连接;隔震弹簧使得装置有一定的竖向变形能力,且提供竖向阻尼。
6.进一步地,滑块支撑件的材料为聚四氟乙烯材料,所述曲面结构具有一定的曲率,能够使得所述装置实现自复位功能。
7.进一步地,滑块支撑件的边缘处设置有限位板。
8.进一步地,所述限位球均匀设置在下支撑板外壁的轨道内,在满足竖向位移的同时避免装置在竖向运动时的竖向位移不一致,并消耗一定的地震能量。
9.进一步地,所述调节支撑杆为竖向控制器,所述隔震装置由隔震弹簧和竖向控制器提供竖向支撑并满足承载力要求,所述竖向控制器包括竖向振动传感器、致动器和电磁
阀,所述隔震装置在未遭受外界扰动时,所述致动器处于关闭状态,使所述隔震装置保持较大竖向刚度;当地震来临时,所述隔震装置受到竖向地震力时,竖向控制器中的竖向振动传感器监测到系统竖向速度或位移的变化,电磁阀控制的致动器开启,此时致动器提供一个时变的控制力,实现装置三维隔震。
10.由此,该隔震装置可以实现装置水平和竖向运动,该隔震装置具有较大的承载力,可满足展柜的静力承载力的要求,便于展柜的日常展示功能的实现和地震作用下的水平和竖向隔震保护。
11.本发明具有以下优点:当地震竖向力传递到该隔震装置时,可依靠该隔震装置竖向隔震部件进行运动和耗能,与水平隔震部件协同工作;该隔震装置与展柜协同工作,更好地保护柜内文物;同时,还能保证该隔震装置竖向位移的一致性,避免出现装置倾斜等情况;本发明能够根据所建立的预测控制算法和最优控制方法,采用速度反馈方式,并利用matlab等工具建立控制系统模型,实现竖向隔震的最优控制。
附图说明
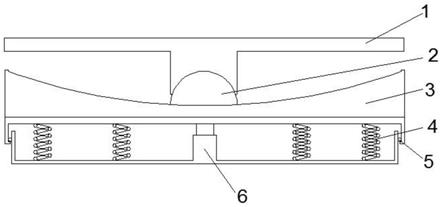
12.图1为半主动控制的摆式三维展柜隔震装置的结构示意图;
13.图2为隔震装置的竖向控制模型图;
14.其中1为上承台,2为水平运动滑块,3为滑块支撑件,4为隔震弹簧,5为限位球,6为调节支撑杆。
具体实施方式
15.为了使本领域技术人员更好地理解本发明的技术方案,下面结合附图对本发明进行详细描述,本部分的描述仅是示范性和解释性,不应对本发明的保护范围有任何的限制作用。
16.请参阅图1,本发明提出一种半主动控制的摆式三维展柜隔震装置,该三维展柜隔震装置为组合型装置,其上部为可摩擦摆动的水平隔震部件,下部为竖向隔震部件,上下两个隔震部件皆为圆形或多边形,并用螺栓进行连接;所述水平隔震部件包括上承台1、水平运动滑块2、滑块支撑件3,所述竖向隔震部件包括上支撑板、下支撑板、隔震弹簧4和支撑杆6,上支撑板为倒u型,下支撑板为u型,所述上支撑板套设在下支撑板外侧,所述下支撑板的外壁上设置有多个限位球5,所述上支撑板侧壁下端设置有凸缘,所述凸缘与限位球相互配合用于对上支撑板进行限位,上支撑板和下支撑板之间设有多个隔震弹簧4和一个调节支撑杆6;
17.进一步地,所述上承台底部具有支撑柱,所述支撑柱与水平运动滑块2固定连接,所述滑块支撑件3上端的运动面为曲面结构,水平运动滑块2滑动设置在滑块支撑件3的曲面结构上;在外力作用下,水平运动滑块2与滑块支撑件3相互摩擦并且依靠摩擦力消耗地震能量;
18.进一步地,所述隔震弹簧4与上支撑板、下支撑板焊接或螺栓连接;隔震弹簧4使得装置有一定的竖向变形能力,且提供竖向阻尼。
19.进一步地,滑块支撑件3的材料为聚四氟乙烯材料,所述曲面结构具有一定的曲率,能够使得所述装置实现自复位功能。
20.进一步地,滑块支撑件3的边缘处设置有限位板。
21.进一步地,所述限位球5均匀设置在下支撑板外壁的轨道内,在满足竖向位移的同时避免装置在竖向运动时的竖向位移不一致,并消耗一定的地震能量。
22.进一步地,所述调节支撑杆6为竖向控制器,所述隔震装置由隔震弹簧4和竖向控制器提供竖向支撑并满足承载力要求,所述竖向控制器包括竖向振动传感器、致动器和电磁阀,所述隔震装置在未遭受外界扰动时,所述致动器处于关闭状态,使所述隔震装置保持较大竖向刚度;当地震来临时,所述隔震装置受到竖向地震力时,竖向控制器中的竖向振动传感器监测到系统竖向速度或位移的变化,电磁阀控制的致动器开启,此时致动器提供一个时变的控制力,实现装置三维隔震。
23.本发明能够根据所建立的预测控制算法和最优控制方法,采用速度反馈方式,并利用matlab等工具建立控制系统模型,实现竖向隔震的最优控制:
24.如图2所示,所述隔震装置的竖向主动控制的振动方程为:
[0025][0026]
其中,f为主动控制力,f为外界激振力,m为竖向隔震上部质量,c为竖向阻尼系数,k为竖向刚度,为装置的竖向加速度,为竖向速度,x为竖向位移;
[0027]
系统的状态变量为:其中t表示为矩阵转置;
[0028]
由系统的竖向振动方程得到系统的状态方程:
[0029][0030]
将系统的状态方程简化为:
[0031]
其中代表系统的下一个状态,
[0032]
其中,状态转移矩阵系统控制量矩阵系统的控制量u=[f f]
t
;
[0033]
根据模型预测控制算法,通过检测实时信息来修正预测的动态行为:
[0034]
系统的单输入和单输出状态空间模型如下:
[0035][0036]
其中,x(t)为t时刻能够测量的状态变量,x(t+1)是t+1时刻系统的预测量,u(t)、y(t)分别为t时刻的系统输入和输出,c
t
为系统输出和状态的关系矩阵;
[0037]
系统的状态变量x通过竖向振动传感器测量系统的竖向位移及竖向速度,控制量u在t~t+n-1时刻变化,之后不发生变化,则在a时刻中,其中a>=n,对系统的状态预测为:
[0038]
x(t+2)=ax(t+1)+bu(t+1)=a2x(t)+abu(t)+bu(t+1),
[0039]
x(t+n)=a
n
x(t)+a
n-1
bu(t)+
···
+bu(t+n-1),
[0040]
x(t+n+1)=a
n+1
x(t)+a
n
bu(t)+
···
+abu(t+n-1)+bu(t+n-1),
[0041]
x(t+a)=a
a
x(t)+a
a-1
bu(t)+
···
+(a
a-n
b+
···
+b)u(t+n-1),
[0042]
对系统的状态预测用向量简化表示为:x(t+i)=a
x
x(t)+b
x
u(t),
[0043][0044][0045]
基于t时刻,在t+a时刻内对未来的系统输出根据输出方程y(t)得到:
[0046]
y(t+1)=c
t
x(t+1)=c
t
ax(t)+c
t
bu(t),
[0047]
y(t+2)=c
t
x(t+2)=c
t
a2x(t)+c
t
abu(t)+c
t
bu(t+1),
[0048]
y(t+a)=c
t
a
a
x(t)+c
t
a
a-1
bu(t)+
···
+c
t
(a
a-n
b+
···
+b)u(t+n-1),
[0049]
系统的输出y(t)用向量简化表示为:y(t+i)=a
y
x(t)+b
y
u(t),
[0050][0051][0052]
从t时刻起有n个控制量u(t)、u(t+1)...u(t+n-1)使得被控制对象在以后的a个步数内的x=0,
[0053]
根据最优控制原理,要求系统的输入能完全跟随输出,令系统的性能指标函数为:
[0054][0055]
q
x
,r
x
分别为状态加权矩阵和状态控制加权矩阵,
[0056]
用最优控制原理对状态进行调节,取性能指标为最小值时获得最优控制u(t):
[0057][0058]
在t时刻开始的控制中,输出预测值y(t+i)接近给定值y
r
(t+i)时,根据最优控制原理令系统的性能指标函数为:
[0059][0060]
q
y
,r
y
为输出加权矩阵和输出控制加权矩阵,
[0061]
而期望矩阵为:y
r
(t+i)=[y
r
(t+1) y
r
(t+2) ··· y
r
(t+a)]
t
;
[0062]
通过最化控制原理对输出进行跟踪,性能指标取得最小值时得到最优控制
[0063]
由此,该隔震装置可以实现装置的水平和竖向运动,该隔震装置具有较大的承载力,可满足展柜的静力承载力的要求,能够实现竖向隔震的最优控制,便于展柜的日常展示功能的实现和地震作用下的水平和竖向隔震保护。
[0064]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换及本发明的各个技术方案显而易见的改进,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1