一种对米粉生产车间进行监控的智能监控系统的制作方法
[0001]
本发明涉及监控系统技术领域,具体为一种对米粉生产车间进行监控的智能监控系统。
背景技术:
[0002]
米粉,是指以大米为原料,经浸泡、蒸煮、压条等工序制成的条状、鱼丸米粉丝状米制品,而不是词义上理解的以大米为原料以研磨制成的粉状物料。米粉的制作工艺大都以机器制作、干粉泡发。随着现代信息社会的发展,人民的生活水准也在不断提升,因而对安全的需求也越来越迫切,国内外安防市场就迫切需要智能安防监控系统产品,近年来,国内外先后涌现出一批不同程度的智能安防监控系统或产品,由此也可窥见,安防监控系统正在由数字化、网络化逐步走向智能化。
[0003]
现有的监控系统,需要定点安装在固定位置,施工不方便,不能进行水平和竖直方向多方位的旋转,监控范围容易出现死角,监控角度不能灵活改变,不能进行高度上的改变的问题,不能很好的满足人们的使用需求,针对上述情况,在现有的监控系统基础上进行技术创新。
技术实现要素:
[0004]
本发明的目的在于提供一种对米粉生产车间进行监控的智能监控系统,以解决上述背景技术中提出现有的监控系统,需要定点安装在固定位置,施工不方便,不能进行水平和竖直方向多方位的旋转,监控范围容易出现死角,监控角度不能灵活改变,不能进行高度上的改变的问题,不能很好的满足人们的使用需求问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种对米粉生产车间进行监控的智能监控系统,包括摄像头本体和摄像底座,所述摄像头本体的内部设置有摄像探头,且摄像探头的四周均设置有补光灯,所述摄像探头的下方设置有红外成像仪,且摄像头本体的外壁设置有防护套,所述防护套的外壁设置有防护壳,且防护壳的上方固定有挡板,所述防护壳的内部设置有销栓,且防护壳的底部固定有连接柱,所述连接柱的下端设置有限位柱,且限位柱的下方设置有承接板,所述承接板的下端设置有摄像底座,且摄像底座的内部安装有驱动电机,所述摄像底座的下端固定有伸缩内杆,且伸缩内杆的下端设置有伸缩套杆,所述伸缩套杆的内部安装有油缸,所述伸缩套杆的下端固定有安装板,所述安装板的内部设置有螺孔。
[0006]
优选的,所述销栓贯穿于摄像头本体和防护壳的内部,且防护壳通过连接柱和限位柱与承接板之间构成卡合结构。
[0007]
优选的,所述防护壳通过连接柱与驱动电机之间构成转动结构,且防护壳与连接柱和摄像底座的竖直中心线均重合。
[0008]
优选的,所述补光灯沿摄像探头的四周均匀分布,且红外成像仪与摄像头本体之间构成可拆卸结构。
[0009]
优选的,所述挡板与防护壳之间为焊接连接,且防护套与摄像头本体之间为胶粘连接。
[0010]
优选的,所述伸缩内杆通过油缸与伸缩套杆之间构成伸缩结构,且伸缩内杆与伸缩套杆的竖直中心线重合。
[0011]
优选的,所述伸缩套杆与安装板之间为焊接连接,且螺孔沿安装板的四周均匀分布。
[0012]
与现有技术相比,本发明的有益效果如下:该对米粉生产车间进行监控的智能监控系统设置有摄像头本体通过销栓安装在防护壳内,具有转动性,可使该结构进行竖直方向的旋转,防护壳通过连接柱扣合在承接板上,对该部分起支撑作用,不影响该结构水平方向的转动,驱动电机可以对防护壳水平方向的转动提供动力条件,方便使用,防护壳通过连接柱与摄像底座之间进行固定,满足该结构的合理性。
[0013]
补光灯可以对摄像探头的照射进行补光,避免视线昏暗情况下造成摄像不清晰的情况,红外成像仪可以对车间进行热成像捕捉,避免高温引起火灾,挡板和防护壳可以对摄像头本体进行挡雨防尘,防护套对摄像头本体起防爆保护作用,可以有效避免摄像头本体被损坏。
[0014]
伸缩内杆通过油缸在伸缩套杆内做伸缩动作,可使摄像头本体进行高度的变化,方便升高固定到合适位置和降低高度拆装检修,该装置通过安装板固定在地面合适位置,方便该装置的拆装检修和使用,螺孔开设在安装板的四周,保证该装置的稳定性。
附图说明
[0015]
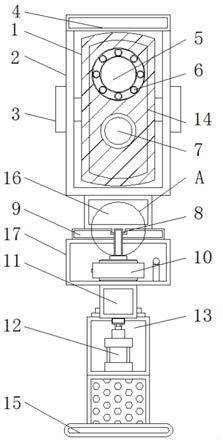
图1为本发明主视结构示意图;
[0016]
图2为本发明摄像头本体的侧视结构示意图;
[0017]
图3为本发明图1中a处局部放大结构示意图;
[0018]
图4为本发明伸缩内杆和伸缩套杆的立体结构示意图。
[0019]
图中:1、摄像头本体;2、防护壳;3、销栓;4、挡板;5、摄像探头;6、补光灯;7、红外成像仪;8、限位柱;9、承接板;10、驱动电机;11、伸缩内杆;12、油缸;13、伸缩套杆;14、防护套;15、安装板;16、连接柱;17、摄像底座;18、螺孔。
具体实施方式
[0020]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0021]
请参阅图1-4,本发明提供一种技术方案:一种对米粉生产车间进行监控的智能监控系统,包括摄像头本体1、防护壳2、销栓3、挡板4、摄像探头5、补光灯6、红外成像仪7、限位柱8、承接板9、驱动电机10、伸缩内杆11、油缸12、伸缩套杆13、防护套14、安装板15、连接柱16、摄像底座17和螺孔18,摄像头本体1的内部设置有摄像探头5,且摄像探头5的四周均设置有补光灯6,摄像探头5的下方设置有红外成像仪7,且摄像头本体1的外壁设置有防护套14,防护套14的外壁设置有防护壳2,且防护壳2的上方固定有挡板4,防护壳2的内部设置有
销栓3,且防护壳2的底部固定有连接柱16,连接柱16的下端设置有限位柱8,且限位柱8的下方设置有承接板9,承接板9的下端设置有摄像底座17,且摄像底座17的内部安装有驱动电机10,摄像底座17的下端固定有伸缩内杆11,且伸缩内杆11的下端设置有伸缩套杆13,伸缩套杆13的内部安装有油缸12,伸缩套杆13的下端固定有安装板15,安装板15的内部设置有螺孔18。
[0022]
本发明中:销栓3贯穿于摄像头本体1和防护壳2的内部,且防护壳2通过连接柱16和限位柱8与承接板9之间构成卡合结构;摄像头本体1通过销栓3安装在防护壳2内,具有转动性,可使该结构进行竖直方向的旋转,防护壳2通过连接柱16扣合在承接板9上,对该部分起支撑作用,不影响该结构水平方向的转动。
[0023]
本发明中:防护壳2通过连接柱16与驱动电机10之间构成转动结构,且防护壳2与连接柱16和摄像底座17的竖直中心线均重合;驱动电机10可以对防护壳2水平方向的转动提供动力条件,方便使用,防护壳2通过连接柱16与摄像底座17之间进行固定,满足该结构的合理性。
[0024]
本发明中:补光灯6沿摄像探头5的四周均匀分布,且红外成像仪7与摄像头本体1之间构成可拆卸结构;补光灯6可以对摄像探头5的照射进行补光,避免视线昏暗情况下造成摄像不清晰的情况,红外成像仪7可以对车间进行热成像捕捉,避免高温引起火灾。
[0025]
本发明中:挡板4与防护壳2之间为焊接连接,且防护套14与摄像头本体1之间为胶粘连接;挡板4和防护壳2可以对摄像头本体1进行挡雨防尘,防护套14对摄像头本体1起防爆保护作用,可以有效避免摄像头本体1被损坏。
[0026]
本发明中:伸缩内杆11通过油缸12与伸缩套杆13之间构成伸缩结构,且伸缩内杆11与伸缩套杆13的竖直中心线重合;伸缩内杆11通过油缸12在伸缩套杆13内做伸缩动作,可使摄像头本体1进行高度的变化,方便升高固定到合适位置和降低高度拆装检修。
[0027]
本发明中:伸缩套杆13与安装板15之间为焊接连接,且螺孔18沿安装板15的四周均匀分布;该装置通过安装板15固定在地面合适位置,方便该装置的拆装检修和使用,螺孔18开设在安装板15的四周,保证该装置的稳定性。
[0028]
该对米粉生产车间进行监控的智能监控系统的工作原理:首先,将摄像头本体1通过销栓3安装在防护壳2内,可使该结构进行竖直方向的旋转,在防护壳2的上方焊接挡板4,挡板4和防护壳2可以对摄像头本体1进行挡雨防尘;
[0029]
其次,在摄像头本体1的内部设置摄像探头5和红外成像仪7,红外成像仪7可以对车间进行热成像捕捉,避免高温引起火灾,补光灯6沿摄像探头5的四周均匀分布,避免视线昏暗情况下造成摄像不清晰的情况,在摄像头本体1的外壁粘贴防护套14,起防爆保护作用,可以有效避免摄像头本体1被损坏;再其次,连接柱16固定在防护壳2的底部,连接柱16通过限位柱8扣合在承接板9上,对该部分起支撑作用,承接板9设置在摄像底座17的上方,在摄像底座17的内部安装驱动电机10,可使该结构进行水平方向的旋转;然后,伸缩内杆11固定在摄像底座17的底部,伸缩内杆11的外壁设置伸缩套杆13,在伸缩套杆13的内部安装油缸12,伸缩内杆11通过油缸12在伸缩套杆13内做伸缩动作,可使摄像头本体1进行高度的变化,方便升高固定到合适位置和降低高度拆装检修;
[0030]
最后,安装板15固定在伸缩套杆13的下端,螺孔18沿安装板15的四周均匀分布,将该装置通过安装板15固定在地面合适位置。
[0031]
在一个实施例中,所述智能监控系统还包括控制器,用于根据所述摄像头本体1采集到的所述发生异常情况的坐标点得到所述异常情况坐标点到所述摄像头的中心位置坐标点的距离,根据所述异常情况坐标点到所述摄像头的中心位置坐标点的距离得到所述摄像头需要转动的角度,根据所述摄像头需要转动的角度得到所述驱动电机10的转速,保证所述发生异常情况的坐标点移动到所述摄像头的中央位置时驱动电机刚好停止转动,保证了对所述异常情况的位置进行最大化的监控;其具体步骤包括:
[0032]
步骤a1:利用公式(1)根据所述摄像头本体1采集到的所述发生异常情况的坐标点得到所述异常情况坐标点得到所述摄像头的中心位置坐标点的距离
[0033][0034]
其中l表示所述异常情况坐标点到所述摄像头的中心位置坐标点的距离;(x,y)表示所述摄像头采集到的当前异常情况坐标点;(x0,y0)表示所述摄像头的中心位置坐标点;
[0035]
步骤a2:利用公式(2)根据所述异常情况坐标点到所述摄像头的中心位置坐标点的距离得到所述摄像头在水平方向上需要旋转的角度θ,控制所述摄像头在水平方向上按照所述θ旋转:
[0036][0037]
其中θ表示所述摄像头在水平方向上需要旋转的角度当θ>0时表示所述摄像头在水平方向上需要顺时针旋转,当θ<0时表示所述摄像头在水平方向上需要逆时针旋转;j表示所述摄像头的焦距;
[0038]
步骤a3:利用公式(3)根据所述摄像头在水平方向上需要旋转的角度得到所述驱动电机10的控制转速ω,控制所述驱动电机10的转速为所述ω:
[0039][0040]
其中ω表示所述驱动电机10的控制转速;ω
max
表示所述驱动电机10在所述控制范围内可以达到的最大转速。
[0041]
上述技术方案的有益效果是:利用步骤a1的公式1得到所述摄像头的中心位置坐标点的距离,目的是根据采集到的发生异常情况的坐标点,可以计算出所述发生异常情况的坐标点到中心点的距离从而为后续的控制提供条件;再利用步骤a2中的公式2得到所述摄像头在水平方向上需要旋转的角度,从而利用公式得到所述摄像头需要转动的角度以及转动的方向;最后利用步骤a3中的公式3得到所述驱动电机10的控制转速,便可以根据所述驱动电机10的控制转速对所述驱动电机10的转速进行控制,并且再根据步骤a2得到的所述摄像头在水平方向上需要旋转的角度的正负情况得到所述摄像头在水平方向上需要旋转的方向,从而保证所述发生异常情况的坐标点移动到所述摄像头的中央位置时驱动电机刚好停止转动,保证了对所述异常情况的位置进行最大化的监控;保证了系统的稳定性,并且可以在发现情况时可以最大化的对异常情况进行监控。
[0042]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1