工程机械及工程机械的控制方法与流程
1.本发明涉及一种工程机械及工程机械的控制方法。
背景技术:
2.诸如挖掘机的工程机械不仅可以利用发动机的动力来进行行驶,还可以利用诸如铲斗的前作业装置来进行挖土等作业。
3.通常,工程机械可以以三种行驶模式进行行驶,三种行驶模式分别为低速行驶模式(一档)、高速行驶模式(二档)以及自动变速行驶模式。
4.作业者可以通过变速杆来选择变速模式,当作业者选择了高速或低速模式时,以所选择的变速模式进行变速。此外,当选择了自动变速模式时,根据行驶速度由低速向高速自动地执行变速。
5.工程机械具备诸如铲斗的作业装置,因而不仅可以行驶,还可以执行作业,并且,作业时比行驶时需要更高的旋转力。
6.然而,当选择为自动变速模式时,若单纯根据行驶速度来执行变速,将无法充分地确保作业时所需的旋转力,因而存在作业的效率性下降的问题。
技术实现要素:
7.技术问题
8.本发明为解决上述问题而构思,其目的在于,提供一种通过变速控制来提高作业效率性的工程机械及工程机械的控制方法。
9.技术方案
10.本发明的示例性的实施例提供一种工程机械,所述工程机械可以包括:感测所述工程机械的行驶速度的机构;工作模式选择机构,其选择所述工程机械的工作模式;变速器,其执行所述工程机械的2个档以上的变速;以及控制机构,其根据感测到的所述行驶速度和所选择的所述工作模式自动地控制所述变速器。
11.优选地,所述工作模式选择机构包括作业模式及行驶模式,当所述工程机械的工作模式为作业模式时,所述控制机构可以以固定为一档的方式控制所述变速器。
12.优选地,所述工作模式选择机构可以包括作业模式及行驶模式,当所述工程机械的工作模式为行驶模式时,所述控制机构根据感测到的所述行驶速度自动地控制所述变速器。
13.优选地,所述工作模式选择机构可以包括作业模式、行驶模式以及自动模式,当所述工程机械的工作模式为自动模式时,所述控制机构根据所述工程机械的作业机的工作状态及感测到的所述行驶速度自动地控制所述变速器。
14.优选地,所述工程机械可以包括:自动变速模式选择机构,其能够通过用户选择自动变速模式。
15.优选地,所述自动变速模式选择机构可以位于所述工程机械的舱室的内部。
16.优选地,所述工程机械可以包括:变速杆,其选择低速模式及高速模式中的一个来执行所述变速器的变速;以及自动变速模式选择机构,其能够通过用户选择自动变速模式,当在通过所述自动变速模式选择机构选择了自动变速模式的状态下操作所述变速杆时,所述控制机构根据所述变速杆的操作对所述变速器执行各自对应的变速模式。
17.优选地,所述工程机械可以包括:变速杆,其选择低速模式、高速模式及自动变速模式中的一个来执行所述变速器的变速。
18.优选地,所述工程机械可以包括:变速杆,其选择2个档以上的档位来执行所述变速器的变速,所述控制机构根据所述变速杆的操作对所述变速器执行各自对应的档位的变速。
19.本发明的示例性的实施例提供一种工程机械,所述工程机械可以包括:感测所述工程机械的行驶速度的机构;工作模式选择机构,其选择所述工程机械的包括作业模式、行驶模式的工作模式;变速杆,其选择低速模式、高速模式及自动变速模式中的一个来执行所述变速器的变速;变速器,其执行所述工程机械的2个档以上的变速;以及控制机构,其根据感测到的所述行驶速度、所选择的所述工作模式及所选择的所述变速杆的信号自动地控制所述变速器。
20.本发明的示例性的实施例提供一种工程机械的控制方法,用于在低速行驶模式和高速行驶模式之间对工程机械的行驶模式进行自动变速,所述工程机械的控制方法可以包括:感测所述工程机械的行驶速度的动作;根据感测到的所述行驶速度来执行所述变速装置的变速的动作;判断所述工程机械的当前工作模式的动作;以及在当前工作模式为作业模式的情况下,以固定为低速模式的方式对所述变速装置执行变速的动作。
21.本发明的示例性的实施例提供一种工程机械的控制方法,用于在低速行驶模式和高速行驶模式之间对工程机械的行驶模式进行自动变速,所述工程机械的控制方法可以包括:感测所述工程机械的行驶速度的动作;根据感测到的所述行驶速度来执行所述变速装置的变速的动作;判断所述工程机械的当前工作模式的动作;以及在当前工作模式为行驶模式的情况下,根据感测到的所述行驶速度对所述变速装置自动地执行变速的动作。
22.发明的效果
23.根据本发明的示例性的实施例,即使在设定为自动变速模式的情况下,仍能够按照当前工作模式使用高旋转力,从而具有提高作业效率性的效果。
附图说明
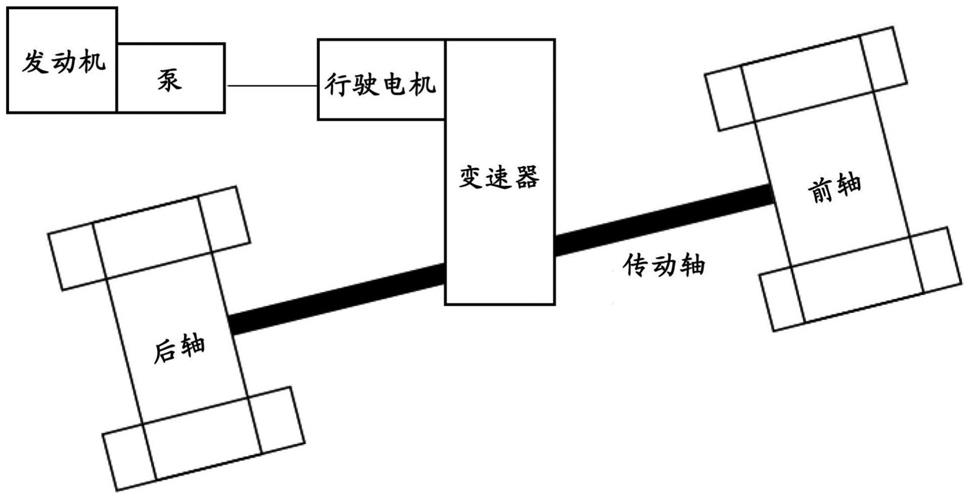
24.图1是示意性地示出本发明的示例性的实施例的工程机械的图。
25.图2是示出本发明的示例性的实施例的工程机械的框图。
26.图3是示出本发明的示例性的实施例的工程机械的变速杆和工作模式选择机构的图。
27.图4a和图4b是示出本发明的示例性的实施例的工程机械的工作模式选择机构的图。
28.图5是示意性地示出本发明的示例性的实施例的工程机械的控制方法的顺序图。
29.附图标记
30.120:感测机构,121:行驶状态感测机构,122:动作状态感测机构,210:变速杆,
220:工作模式选择机构,230:自动变速模式选择机构,260:车辆控制单元,270:控制机构,300:变速器。
具体实施方式
31.下文中,为便于说明,通过示例性的附图对本发明的部分实施例进行说明。在对各图的构成要素记载参照符号时,对于相同的构成要素,即使标示于不同的图中,也尽量用相同的符号标示。
32.本说明书和权利要求书中使用的术语或词语不应被限定为通常的或词典上的含义,而是应本着发明人可以为了以最优的方法描述自身的发明而适当地定义术语的概念的原则来解释为符合本发明的技术思想的含义和概念。此外,在本发明的实施例的构成要素的说明中可能会使用第一、第二、a、b、(a)、(b)等术语。这样的术语仅用于区分该构成要素与另一构成要素,而该构成要素的本质、次序或顺序等不为该术语所限定。当记载为某一构成要素与另一构成要素“连接”或“结合”时,应理解为该构成要素可能与该另一构成要素直接连接或结合,但该构成要素与该另一构成要素之间也可能“连接”或“结合”有又一构成要素。
33.因此,本说明书中记载的实施例和附图中所示的配置仅仅是本发明的最优选的实施例,并不代表本发明的所有技术思想,因此,应理解的是,在本申请时点,可能会有可以代替这些实施例的多样的均等物和变形例。此外,省略对可能不必要地使本发明的要旨不清楚的公知功能及配置的详细说明。
34.下面参照附图对本发明的多种实施例的工程机械的变速控制装置进行具体说明。
35.图1是示意性地示出本发明的示例性的实施例的工程机械的图,图2是示出本发明的示例性的实施例的工程机械的框图,图3是示出本发明的示例性的实施例的工程机械的变速杆210和工作模式选择机构220的图,图4a和图4b是示出本发明的示例性的实施例的工程机械的工作模式选择机构220的图。
36.参照图1,本发明的多种实施例的工程机械可以包括利用车轮行驶的轮式挖掘机,但不限于此,可以包括利用车轮行驶的其他工程机械。
37.轮式挖掘机可以包括发动机、液压泵、行驶电机、变速器、车轴及轮。发动机可以启动液压泵,并且通过液压泵排出工作油。液压泵可以向作业机用缸及行驶电机供应液压。
38.行驶电机可以通过液压泵的工作油驱动来生成用于工程机械的行驶的动力。行驶电机可以控制用于前进/后退的旋转方向,并通过液压来控制旋转速度。行驶电机可以是通过容量控制阀调节容积的可变容量型。
39.变速器可以使行驶动力与工程机械的行驶速度相符地变速。变速后的行驶动力可以通过车轴被传递至车轮。
40.此外,在工程机械中,可以在车辆的前面配置前作业装置。前作业装置可以包括铲斗,但不限于此,并且,可以包括破碎机(breaker),压碎机(crusher)以及剪切机(shear)等能够执行多样的作业的作业装置。
41.这样的诸如铲斗的作业装置可以通过铲斗缸和动臂缸等驱动机构来驱动,而这样的驱动机构可以通过上述液压泵的液压来启动。
42.下文中,这样的铲斗及驱动机构可能被描述为作业机。作业机可以通过具备于工
程机械的多种感测机构120来感测是否进行动作。
43.参照图2至图4b,本发明的示例性的实施例的工程机械可以包括感测机构120、工作模式选择机构220、变速器300及控制机构270。此外,可以包括执行变速器300的变速的变速杆210。
44.感测机构120可以包括感测工程机械的行驶状态的行驶状态感测机构121和/或感测作业机的动作状态的动作状态感测机构122。在一实施例中,行驶状态感测机构121可以感测工程机械的行驶速度或转矩。行驶状态感测机构121可以在车辆行驶时自动地感测车辆的行驶速度和/或转矩,并将感测到值传输至车辆控制单元260。这样的行驶状态感测机构121可以包括利用超声波、激光、微波等的传感器。
45.在一实施例中,动作状态感测机构122可以具备于工程机械的作业机,例如铲斗或铲斗缸的一侧。动作状态感测机构122可以具备于铲斗或铲斗缸并感测铲斗的角度变化或移动位移,并将感测到的变化量传输至车辆控制单元260。控制机构270可以通过作业机的角度变化量或移动位移来判断作业机的动作状态。
46.工作模式选择机构220可以与变速杆210相邻的方式配置于舱室的内部,但是,在一实施例中,工作模式选择机构220可以包括如图4a所示的模式转换开关,在另一实施例中,可以包括如图4b所示的模式转换操纵杆。但是,不限于该方式。
47.在一实施例中,工作模式选择机构220可以设置为能够由作业者选择作业模式或行驶模式。
48.在一实施例中,工作模式选择机构220可以以能够选择作业模式、行驶模式或自动模式的方式被设置为诸如开关或操纵杆的形态。在这种情况下,可以设置为能够通过一个开关或操纵杆选择各工作模式,但不限于此,可以另行具备用于选择自动模式的开关或操纵杆并将其配置于舱室的一侧。
49.在本发明中,可以通过工作模式选择机构220选择工程机械的作业模式和行驶模式。
50.此外,在一实施例中,可以选择能够通过识别工程机械的当前工作状态来自动地选择作业模式和行驶模式的自动模式。当作业者在工作模式选择机构220选择了自动模式时,可以通过安装于工程机械的作业机的当前工作状态来判断作业模式或行驶模式。例如,可以通过铲斗和/或具备于铲斗的动作状态感测机构121来感测铲斗的角度变化,并根据感测到的铲斗的角度来判断作业模式。
51.通过变速杆210的操作,可以选择工程机械的前进和或后退。此外,变速杆210可以选择手动变速模式(低速模式、高速模式)及自动变速模式。
52.变速杆210可以选择2个档以上的档位,以执行变速器的变速。在一实施例中,当用户将变速杆210操作为手动变速模式中的低速模式时,可以以低速(一档)固定地行驶。在这种情况下,行驶电机的旋转速度可以被控制为低速,并且可以获得相对高的旋转力。
53.在一实施例中,当用户将变速杆210操作为手动变速模式中的高速模式时,可以以高速(二档)固定地行驶。在这种情况下,行驶电机可以相对于一档被控制为高速、低旋转力。
54.在一实施例中,当用户将变速杆210操作为自动变速模式时,可以根据工程机械的行驶速度自动地执行从一档到二档的变速。
55.根据多种实施例,当选择了自动变速模式时,可以根据工程机械的工作模式来控制变速器300。具体地,当工程机械当前以行驶模式工作中时,可以根据行驶速度来执行自动变速,当工程机械当前以作业模式工作中时,可以通过控制机构270以固定为低速,即一档的方式进行变速。
56.在一实施例中,工程机械可以包括自动变速模式选择机构230。自动变速模式选择机构230可以与上述变速杆210单独地设置,但不限于此,自动变速模式选择机构230可以具备于变速杆210的一侧。即,自动变速模式选择机构230可以配置于舱室的内部。用户可以通过自动变速模式选择机构230选择自动变速模式。当通过自动变速模式选择机构230的操作选择了自动变速模式时,可以根据工程机械的行驶速度自动地执行从一档到二档的变速。然而,即使在进行自动变速的情况下,当通过车辆控制装置vcu260感测到用户的变速杆210的操作时,仍可以通过控制机构270执行向变速杆210所选择的变速模式的变速。即,优先适用变速杆210的操作信号来执行变速。
57.例如,当在通过自动变速模式选择机构230进行自动变速的期间内用户通过变速杆210的操作将行驶模式选择为低速一档时,控制机构270可以对变速器300执行向一档的变速。此外,当用户通过变速杆210的操作将行驶模式选择为高速(二档)时,变速器300可以通过控制机构执行向二档的变速。
58.在本发明中,通过具备单独的自动变速模式选择机构230,使得以往熟悉手动变速器300的变速杆210的操作的用户能够无违和感地使用自动变速器300,并且必要时随时优先反映变速杆210的操作来执行变速,从而能够提高手动变速器300的用户运用工程机械的便利性。
59.变速器300可以以能够向行驶电机的输出侧(未图示)传递动力的方式连接。这里,可以描述为通过多个摩擦盘将由行驶电机产生的动力传递至变速装置的齿轮部的离合器盘式变速装置,但不限于此。
60.变速器300的输入轴(未图示)可以连接于行驶电机的输出侧,并且可以与通过离合器式工作机构来进行前进或后退的输出轴(未图示)选择性地连接。此外,可以在输出轴结合有用于进行低速(一档)及高速(二档)的变速的行星齿轮(未图示)。由此,可以对前进、后退分别进行向一档及二档的变速。这里,可以描述为二档,但不限于此,可以以2个档以上的车速进行变速。
61.本发明的示例性的实施例的工程机械可以包括控制机构270。控制机构270可以是变速器控制单元270(tcu)。控制机构270可以根据由行驶状态感测机构121感测到的工程机械的行驶速度及由工作模式选择机构220选择的工程机械的工作模式来控制变速器300的变速。
62.例如,当通过工作模式选择机构200选择了作业模式或行驶模式时,车辆控制单元260可以将工程机械的当前工作模式判断为作业模式或行驶模式。此外,当选择了自动模式时,车辆控制单元260可以通过由动作状态感测机构122感测到的结果自动地判断作业模式或行驶模式。
63.在示例性的实施例中,经判断工程机械的当前工作模式,当工程机械处于行驶模式时,可以控制为根据变速杆210的操作信号变速为一档、二档或自动变速模式。在自动变速模式中,可以控制为根据由行驶状态感测机构121感测到的行驶速度自动地变速。
64.此外,经判断工程机械的当前工作模式,当工程机械为作业模式时,可以根据变速杆210的操作信号来选择一档或二档,并以所选择的一档或二档执行变速。
65.然而,当工程机械的工作模式为作业模式,并且在根据变速杆210的操作选择了自动变速模式时,控制机构270可以以将变速器300固定为一档的方式进行变速控制,以使用高转速。
66.工作模式的判断可以通过车辆控制单元260根据上述工作模式选择机构220的操作信号来进行。当用户操作工作模式选择机构220来选择了作业模式时,车辆控制单元260可以判断为工程机械当前处于作业模式。在作业模式下,可以通过用户对作业机的操作杆的操作来执行作业机的工作。
67.此外,当用户操作工作模式选择机构220来选择了行驶模式时,车辆控制单元260可以判断为工程机械的当前工作模式为行驶模式。在行驶模式下,为了安全起见,即使用户操作作业机的操作杆,仍可以不执行作业机的工作。
68.在一实施例中,用户可以操作工作模式选择机构220来选择自动模式。当选择了自动模式时,车辆控制单元260可以通过作业机的工作信号来判断工程机械的工作模式。
69.具体地,作业机的工作信号可以包括上述动作状态感测机构122的信号。经感测这样的工作信号,当作业机当前工作中时,可以将工程机械的工作模式判断为作业模式,在这种情况下,即使当前选择了自动变速模式,仍可以以固定为一档的方式进行变速控制,以确保高旋转力。
70.此外,经感测工作信号,若当前没有作业机的工作,则可以将工程机械的工作模式判断为行驶模式,在这种情况下,可以以对应于变速杆210的操作信号的方式进行变速控制。
71.由此,即使在近距离内移动而进行作业的情况下,仍能够进行变速,从而能够提高作业效率性。
72.图5是示意性地示出本发明的示例性的实施例的工程机械的控制方法的顺序图。
73.下面参照图5对上述本发明的示例性的实施例的工程机械的控制方法进行说明。
74.在动作510中,可以通过行驶状态感测机构121感测工程机械的当前行驶速度,并通过车辆控制单元260判断车辆的行驶速度,以在自动变速模式下进行变速控制。
75.在动作520中,可以由车辆控制单元感测工作模式和变速模式。具体地,在工程机械工作时,可以由用户通过自动模式选择机构220选择自动模式。在本发明中,可以选择作业模式、行驶模式、自动模式。
76.此外,在本发明中,可以选择低速(一档)及高速(二档)作为手动变速模式,并且可以选择自动变速模式。在一实施例中,除了变速杆210的操作外,还可以通过自动变速模式选择机构230的操作来选择自动变速模式。
77.在动作530中,可以通过感测工作模式选择机构220的操作信号由判断车辆控制单元260判断工程机械的当前工作模式。在一实施例中,当选择自动模式时,可以根据作业机的感测信号由车辆控制单元自动地判断当前工作模式。
78.之后,可以根据用户对变速杆210的操作来执行变速。在本发明中,可以根据由车辆控制单元判断的工程机械的当前工作模式由控制机构270控制变速器300的变速。
79.具体地,当在动作530中将工程机械的当前工作模式判断为作业模式时,可以在动
作540中判断变速模式。例如,当通过作业模式的选择在动作530中判断为作业模式时,可以根据变速杆210的操作来选择手动变速模式,并且可以在手动变速模式中以所选的车速执行变速。
80.或者,当判断工程机械的工作模式为作业模式时,可以根据变速杆210的操作来选择自动变速模式,在这种情况下,在动作550中,可以通过控制机构270以将变速器300固定为一档的方式进行变速控制,由此控制为能够使用高转速。
81.另一方面,当通过工作模式的选择在动作530中判断工程机械的当前工作模式为行驶模式时,变速器300可以被控制为根据通过变速杆210的操作感测到的变速模式来变速为一档、二档或自动变速模式。
82.在一实施例中,当选择自动模式时,车辆控制单元260可以通过作业机的工作信号来判断工程机械的工作模式。例如,当感测到当前作业机的角度变化时,可以将工程机械的工作模式判断为作业模式,在这种情况下,即使为了确保高旋转力而选择了当前自动变速模式,仍可以如同动作550所示以固定为一档的方式进行变速控制。
83.此外,经感测工作信号,例如,当未检测到当前作业机的角度变化时,可以判断为当前没有作业机的工作,并且可以将工程机械的工作模式判断为行驶模式。在这种情况下,可以如同上述动作560所示以对应于变速杆210的操作信号的方式进行变速控制。
84.以上描述的各动作可以如图5所示依次执行,但不限于此。
85.如上所述,本发明的多种实施例的工程机械可以选择性地采用手动变速模式和自动变速模式,并且,可以根据工程机械的当前工作模式来控制变速,由此提高驱动的效率性。
86.在一实施例中,即使在选择了自动变速模式的情况下,当工程机械当前处于作业模式时,可以以将变速器300固定为一档的方式进行变速控制,由此使用高旋转力,从而提高作业的效率性。
87.并不因上文中说明了构成本发明的实施例的所有构成要素结合为一个或结合为一个而进行动作的情况就意味着本发明必须限定于这样的实施例。即,只要不脱离本发明的目的范围,所有构成要素也可以选择性地结合为一个以上而进行动作。此外,除非另有相反的记载,以上记载的“包括”、“构成”或“具有”等术语意指该构成要素可以包含在内,因而应解释为还可以包括别的构成要素,而不是排除别的构成要素。除非不同地定义,包括技术术语或科学术语在内的所有术语具有与本发明所属技术领域中的一般的技术人员所通常理解的含义相同的含义。如词典中已定义的术语的通常使用的术语应解释为与相关技术的上下文中的含义一致,除非在本发明中明确定义,不解释为理想的或过于形式性的含义。
88.以上说明仅仅是示例性地说明了本发明的技术思想,本发明所属技术领域内具有一般技能的人士均可以在不脱离本发明的本质性的特性的范围内进行多样的修改和变形。因此,本发明所公开的实施例用于说明本发明的技术思想,而不是限定本发明的技术思想,本发明的技术思想的范围不为这些实施例所限定。本发明的保护范围应由下面的权利要求书解释,与其等同范围内的所有技术思想应解释为落入本发明的权利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1